eCal 基础安装和使用
参考文章:
自动驾驶通信中间件ecal源码分析—1. 什么是ecal
1、安装
使用官网提供的指令安装
主要参考官网进行安装, https://eclipse-ecal.github.io/ecal/index.html
主要这里兼容的主要系统:
Ubuntu 18.04
Ubuntu 20.04
Ubuntu 22.04
这里我使用的是树莓派安装的ubuntu18.04
使用官网提供的指令直接安装:
sudo add-apt-repository ppa:ecal/ecal-latest
sudo apt-get update
sudo apt-get install ecal
安装完成后测试:
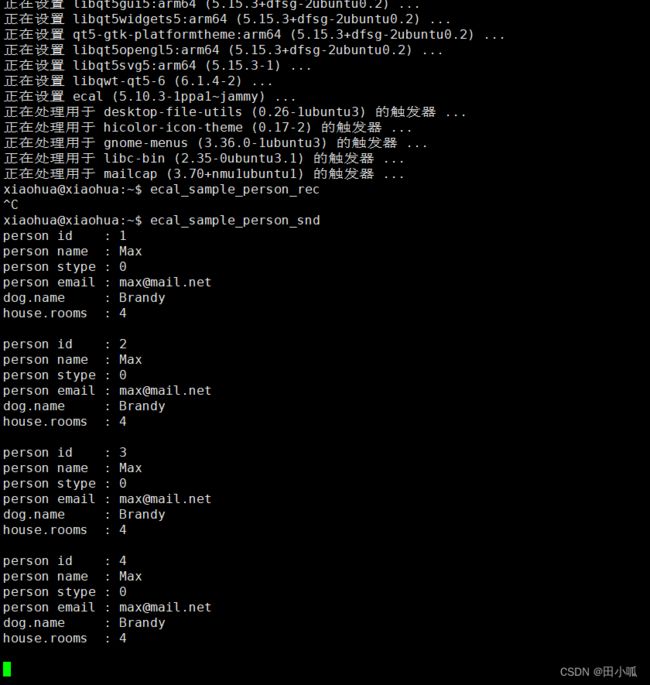
在 Ubuntu 上从终端调用该应用程序定期将一些文本打印到终端。在后台,应用程序创建了一个主题人员并向其发送数据:
ecal_sample_person_snd
接收部分:订阅者订阅了主题人员并将其接收的所有数据打印到终端:
ecal_sample_person_rec
运行过程:
2、基础demo hello word
(1)、事前准备:
需要安装protobuf通信组件
可以参考之前的文章:https://editor.csdn.net/md/?articleId=127388599
这里按照官网的教程直接使用下面的指令进行安装即可:
sudo apt install cmake g++ libprotobuf-dev protobuf-compiler
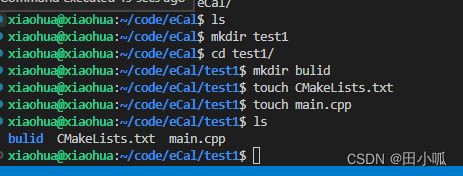
(2)、建立目录文件
需要一个bulid文件夹,一个cmake文件和一个main文件:
mkdir bulid
touch main.cpp CMakelists.txt
.
├── bulid/
├── CMakeLists.txt
└── main.cpp
(3)、cmake:
安装cmake:
参考:https://editor.csdn.net/md/?articleId=126542158
可以直接使用指令安装:
sudo apt install cmake
sudo cmake --version
Cmakelists文件:
cmake_minimum_required(VERSION 3.0)
set(CMAKE_FIND_PACKAGE_PREFER_CONFIG ON)
project(hello_world_snd)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
find_package(eCAL REQUIRED)
set(source_files
main.cpp
)
add_executable(${PROJECT_NAME} ${source_files})
target_link_libraries(${PROJECT_NAME}
eCAL::core
)
(4)、测试cmake
cd bulid
cmake ..
a、遇到cmake执行报错:
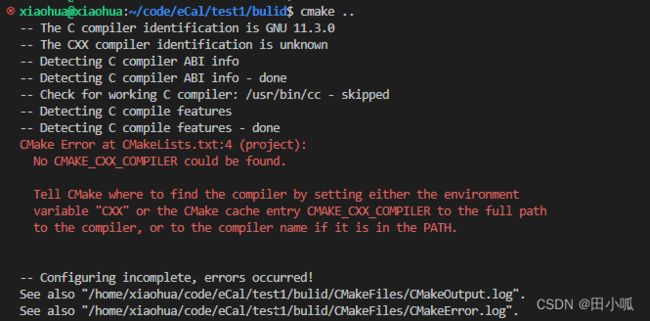
CMake Error at CMakeLists.txt:4 (project):
No CMAKE_CXX_COMPILER could be found.
CMAKE_CXX_COMPILER 没有找到;原因是没有安装gcc和g++编译环境。
解决:
sudo apt-get update
sudo apt-get install -y build-essential
安装上就行了。
b、遇到Cmake问题报错2
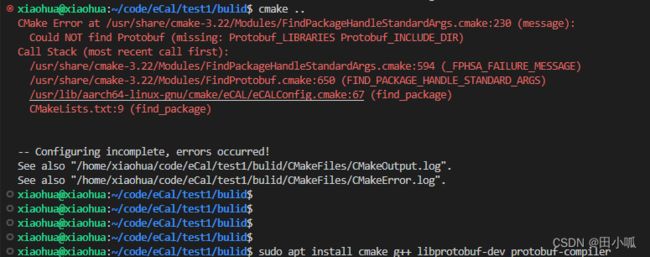
CMake Error at /usr/share/cmake-3.22/Modules/FindPackageHandleStandardArgs.cmake:230 (message):
Could NOT find Protobuf (missing: Protobuf_LIBRARIES Protobuf_INCLUDE_DIR)
Call Stack (most recent call first):
/usr/share/cmake-3.22/Modules/FindPackageHandleStandardArgs.cmake:594 (_FPHSA_FAILURE_MESSAGE)
/usr/share/cmake-3.22/Modules/FindProtobuf.cmake:650 (FIND_PACKAGE_HANDLE_STANDARD_ARGS)
/usr/lib/aarch64-linux-gnu/cmake/eCAL/eCALConfig.cmake:67 (find_package)
CMakeLists.txt:9 (find_package)
这里是说没有找到protobuf,需要先进行安装
sudo apt install cmake g++ libprotobuf-dev protobuf-compiler
安装完成后解决了。
(5)、消息发布端main.cpp
代买实现了一个ecal的发布器,按照延时发布消息。
#include 编写好main文件后:
cd bulid
cmake ..
make
./hello_world_snd
应该问题不大,最后的结果:
官网对代码的解释:
第 1 行包含基本的 eCAL 标头。 当我们要发布原始字符串时,第 2 行包含 eCAL 字符串发布服务器。 eCAL 支持多种消息格式。
第 10 行初始化了 eCAL。 在使用 API 之前,始终必须初始化 eCAL。 我们的eCAL流程的名称将是“Hello World Publisher”。 进程运行后,此名称将在 eCAL 监视器中可见。
第 13 行创建一个 eCAL 发布服务器。 eCAL 进程可以创建多个发布者(和多个订阅者)。 我们发布的主题将是“hello_world_topic”。
从第 20 行开始的 while 循环将导致无限发布循环。 eCAL 支持停止信号;当 eCAL 进程停止时,将返回 false。eCAL::Ok()
第 25 行将发布我们的消息并将其发送到已订阅该主题的其他 eCAL 进程。
第 32 行取消初始化 eCAL。应始终在应用程序退出之前执行此操作。
(6)、消息接收部分
这里需要新建一个和上文消息发布的目录一致的另一个目录
消息接收部分的cmake文件:
make_minimum_required(VERSION 3.0)
set(CMAKE_FIND_PACKAGE_PREFER_CONFIG ON)
project(hello_world_rec)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
find_package(eCAL REQUIRED)
set(source_files
main.cpp
)
add_executable(${PROJECT_NAME} ${source_files})
target_link_libraries(${PROJECT_NAME}
eCAL::core
)
消息接收部分的main代码:
#include 编译运行
cd bulid
cmake ..
make
(7)、测试运行
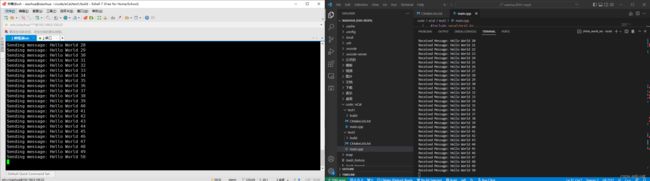
打开两个终端,先运行发布消息,然后另一个终端运行订阅程序:
发布
./hello_world_snd
订阅
./hello_world_rec
可以看到通信成功
3、eCal 发布订阅 protobuf
使用字符串非常适合具有文本表示形式的简单数据。 但是数据通常会更加复杂,因此需要某种协议来定义数据的结构。
使用Google protobuf,因为:
它解决了如何为您序列化和反序列化数据的问题
您可以获得开箱即用的向下兼容性(如果您遵循指南)
它由谷歌维护,API稳定
eCAL监视器可以显示数据的良好反射视图
新建一个文件目录:
mkdir protobuf_rec protobuf_snd proto_messages
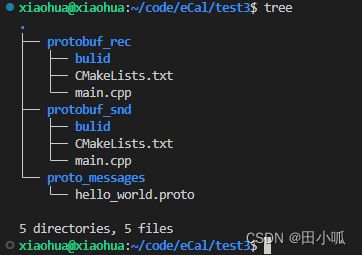
首先需要先制作一个protobuf文件,打开 proto_messages/hello_world.proto:
syntax = "proto3";
package proto_messages;
message HelloWorld
{
string name = 1;
uint32 id = 2;
string msg = 3;
}
(1)、数据发送端
cmake文件
cmake_minimum_required(VERSION 3.0)
set(CMAKE_FIND_PACKAGE_PREFER_CONFIG ON) # 如果未指定任何模式,则告诉 find_package() 在“模块”模式之前尝试“配置”模式。
project(protobuf_snd) # 指定project name
set(CMAKE_CXX_STANDARD 14) # 指定C++版本
set(CMAKE_CXX_STANDARD_REQUIRED ON) # 设置指定的C++编译器版本是必须的,如果不设置,或者为OFF,则指定版本不可用时,会使用上一版本。
find_package(eCAL REQUIRED) # 查找依赖包 eCAL
find_package(Protobuf REQUIRED) # 查找依赖包 Protobuf
set(source_files
main.cpp
)
set(protobuf_files
${CMAKE_CURRENT_SOURCE_DIR}/../proto_messages/hello_world.proto
)
add_executable(${PROJECT_NAME} ${source_files}) # 添加一个可执行文件构建目标
PROTOBUF_TARGET_CPP(${PROJECT_NAME} ${CMAKE_CURRENT_SOURCE_DIR}/../proto_messages/ ${protobuf_files}) # 链接到目标头文件和源文件
target_link_libraries(${PROJECT_NAME} # 将目标文件与库文件进行链接。
eCAL::core
protobuf::libprotobuf
)
源文件main.cpp
#include (2)、数据接收端
cmake文件:
cmake_minimum_required(VERSION 3.0)
set(CMAKE_FIND_PACKAGE_PREFER_CONFIG ON)
project(protobuf_rec)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
find_package(eCAL REQUIRED)
find_package(Protobuf REQUIRED)
set(source_files
main.cpp
)
set(protobuf_files
${CMAKE_CURRENT_SOURCE_DIR}/../proto_messages/hello_world.proto
)
add_executable(${PROJECT_NAME} ${source_files})
PROTOBUF_TARGET_CPP(${PROJECT_NAME} ${CMAKE_CURRENT_SOURCE_DIR}/../proto_messages/ ${protobuf_files})
target_link_libraries(${PROJECT_NAME}
eCAL::core
protobuf::libprotobuf
)
源文件main.cpp
#include
#include
#include
#include
#include "hello_world.pb.h"
void HelloWorldCallback(const proto_messages::HelloWorld& hello_world_msg)
{
std::cout << hello_world_msg.name() << " sent a message with ID "
<< hello_world_msg.id() << ":" << std::endl
<< hello_world_msg.msg() << std::endl << std::endl;
}
int main(int argc, char** argv)
{
// 初始化eCAL并创建一个protobuf订阅者
eCAL::Initialize(argc, argv, "Hello World Protobuf Subscriber");
eCAL::protobuf::CSubscriber subscriber("hello_world_protobuf");
// 设置回调
subscriber.AddReceiveCallback(std::bind(&HelloWorldCallback, std::placeholders::_2));
// 不要退出
while (eCAL::Ok())
{
std::this_thread::sleep_for(std::chrono::milliseconds(500));
}
// finalize eCAL API
eCAL::Finalize();
}
(3)、测试运行
cd bulid
cmake ..
make
./protobuf_snd
./protobuf_rec
