Mastering the game of Go without human knowledge (AlphaGo Zero)
AlphaGo的树搜索结合了深度神经网络,这些网络是由专家知识进行监督式学习以及从selfplay中进行强化学习。AlphaGo Zero仅基于强化学习,一个神经网络被训练来预测行为的选择和价值。该神经网络提高了树搜索的性能,从而在下一次迭代中提供了更高质量的移动选择和更强的自我玩法,同时更精确的树搜索又能改善网络性能。
文章目录
- Introduction
- Reinforcement learning in AlphaGo Zero
- Empirical analysis of AlphaGo Zero training
- METHODS
-
- Reinforcement learning.
- Self-play reinforcement learning in games.
- Domain knowledge.
- Self-play training pipeline.
- Optimization.
- Evaluator.
- Self-play.
- Search algorithm.
-
- Select (Fig. 2a).
- Expand and evaluate (Fig. 2b).
- Backup (Fig. 2c).
- Play (Fig. 2d).
- Neural network architecture.
Introduction
AlphaGo训练了两个神经网络——策略网络和值网络。策略网络通过监督学习进行初始化训练,以准确预测人类专家的行动,随后通过策略梯度强化学习对其进行完善。 价值网络以预测策略网络自我博弈的赢家来进行训练。一旦经过训练,这些网络将与蒙特卡洛树搜索(MCTS)组合在一起以提供前瞻性搜索。使用策略网络将搜索范围缩小到高概率移动,并使用价值网络(与蒙特卡罗rollouts结合使用快速rollouts策略)以评估树中的位置。
AlphaGo Zero与AlphaGo不同之处在于:
- 它仅通过selfplay强化学习来训练,从随机游戏开始,无需任何监督或使用人类数据;
- 它仅使用棋盘上的黑白子作为输入特征;
- 它使用单个神经网络,而不是单独的策略和价值网络;
- 它使用了一个更简单的树搜索,该树搜索依靠此单个神经网络来评估位置和样本行为,而无需执行任何Monte Carlo rollouts操作。
为此,作者在训练循环内结合了lookahead search。
Reinforcement learning in AlphaGo Zero
AlphaGo Zero使用参数为θ的深度神经网络 f θ f_θ fθ。该神经网络将位置及其历史的原始棋盘表示 s s s作为输入,并输出移动概率和价值, ( p , v ) = f θ ( s ) (\bold{p},v)=f_\theta(s) (p,v)=fθ(s)。移动概率向量 p \bold{p} p表示选择每个移动a(包括pass)的概率, p a = P r ( a ∣ s ) p_a=Pr(a|s) pa=Pr(a∣s)。值 v v v是一个标量评估,它估计当前玩家从位置 s s s获胜的概率。 该神经网络将策略网络和价值网络的角色组合到一个架构中。神经网络替换成了ResNet的结构。
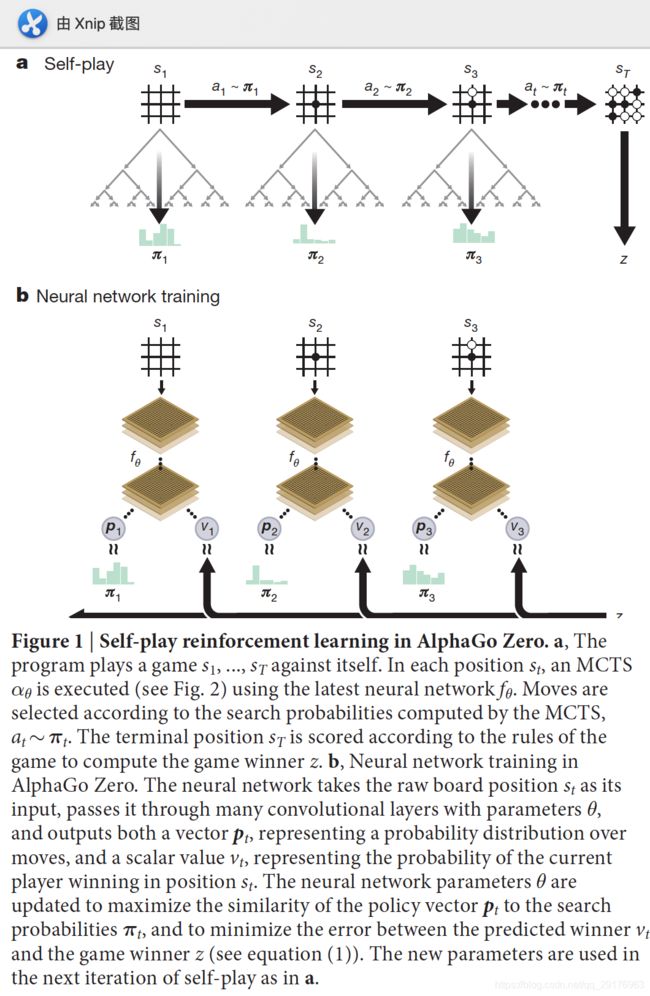
在每一个位置 s s s,在神经网络 f θ f_\theta fθ的引导下执行MCTS搜索。MCTS搜索输出每一步的概率 π π π。 这些搜索概率通常会选择比神经网络 f θ ( s ) f_θ(s) fθ(s)的原始行为概率 p \bold{p} p更优的行为; 因此,MCTS可以被视为强大的策略改进方法。 在self-play过程中使用搜索,使用improved MCTS-based policy来选择每一步动作,使用游戏赢家 z z z更新value,这同时也可以被视为强大的策略评估改进方法。
在策略迭代过程中重复使用这些搜索方法:神经网络的参数被更新,以使移动概率和值 ( p , v ) = f θ ( s ) (\bold{p},v)=f_\theta(s) (p,v)=fθ(s)与改进的搜索概率和selfplay游戏赢家 ( π , z ) (π, z) (π,z)更加匹配;这些新参数将在下一次selfplay的迭代中使用,以使搜索更加强大。 图1展示了自学训练pipline。
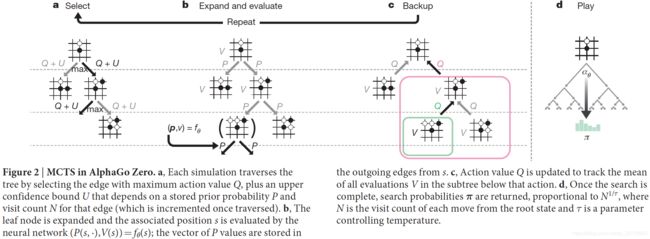
如图2所示,MCTS使用神经网络 f θ f_\theta fθ引导搜索,反过来搜索结果用于更新网络。每一个边 ( s , a ) (s,a) (s,a)包含先验概率 P ( s , a ) P(s,a) P(s,a),访问次数 N ( s , a ) N(s,a) N(s,a),行为价值 Q ( s , a ) Q(s,a) Q(s,a)。每次模拟都是从根节点开始,迭代地选择动作以最大化下式:

直到叶子节点 s ′ s' s′不包含在树内。此叶子节点仅展开与评估一次,使用网络预测其先验概率与评估值, ( P ( s ′ , ⋅ ) , V ( s ′ ) ) = f θ ( s ′ ) (P(s',\cdot),V(s'))=f_\theta(s') (P(s′,⋅),V(s′))=fθ(s′)。然后所有遍历到的边 ( s , a ) (s,a) (s,a)都需要增量更新访问次数和行为价值。
这一基于MCTS的强化学习算法可以看做以网络参数 θ \theta θ和根位置 s s s为输入,计算输出行为概率, π = α θ ( s ) \bold{\pi}=\alpha_\theta(s) π=αθ(s)。与每一步访问次数的指数成正比, π a ∝ N ( s , a ) 1 / τ \pi_a\propto N(s,a)^{1/\tau} πa∝N(s,a)1/τ, τ \tau τ为温度系数。
神经网络具体训练步骤如下:
- 初始化神经网络权重为 θ 0 \theta_0 θ0;
- 在每个后续迭代 i ≥ 1 i≥1 i≥1时,都会产生self-play的游戏(图1a);
- 在每一时间步 t t t,使用神经网络的先前迭代版本 f θ i − 1 f_{θ_{i-1}} fθi−1执行MCTS搜索 π t = α i − 1 ( s t ) \pi_t=\alpha_{i-1}(s_t) πt=αi−1(st),并通过对搜索概率 π t π_t πt进行采样来选择动作;
- 游戏在步骤 T T T终止,其终止条件为:①两个玩家都放弃落子;②搜索值下降到辞阈值以下;③游戏超过最大长度;
- 对游戏进行计分,以得到 r T ∈ { − 1 , + 1 } r_T∈\{− 1,+ 1\} rT∈{−1,+1}的最终奖励;
- 每个时间步 t t t的数据都存储为 ( s t , π t , z t ) (s_t,π_t,z_t) (st,πt,zt),其中 z t = ± r T z_t =±r_T zt=±rT是从当前玩家的角度来看在步骤 t t t的游戏获胜者。 并行地(图1b),新网络参数 θ i θ_i θi是根据selfplay的最后一次迭代的所有时间步中均匀采样的数据 ( s , π , z ) (s,π,z) (s,π,z)训练的;
- 更新网络 ( p , v ) = f θ ( s ) (\bold{p},v)=f_\theta(s) (p,v)=fθ(s),网络损失由MSE、交叉熵损失和正则化构成:

Empirical analysis of AlphaGo Zero training

从完全随机行为开始训练,结果如图3所示。在整个训练过程中,学习进展顺利,并且没有遭受先前文献中提到的振荡或灾难性遗忘。AlphaGo Zero训练36小时后就超越了AlphaGo Lee,72小时后超越了最新版本的AlphaGo Lee(打败李世石的版本),而AlphaGo Lee训练了几个月。此外,AlphaGo Zero仅使用a single machine with 4 tensor processing units (TPUs),而AlphaGo Lee使用了many machines and used 48 TPUs。
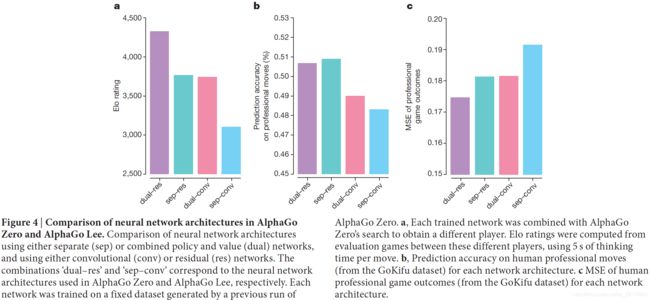
图4验证了AlphaGo Zero中网络结构和算法(单一网络)的贡献。使用AlphaGo Lee中独立的策略和价值网络,或AlphaGo Zero中的组合策略和价值网络,创建了四个神经网络;并使用AlphaGo Lee的卷积网络架构或AlphaGo Zero的残差网络架构。在72小时的self-play训练后,使用由AlphaGo Zero生成的固定的自玩游戏数据集,对每个网络进行了训练,以最大程度地减少相同的损失函数(等式(1))。实验表明使用残差网络更加准确,在AlphaGo中实现了600 Elo的降低,误差更低,并且性能得到了改善。将策略和价值组合到一个网络中会稍微降低移动预测的准确性,但会减少价值错误,并使AlphaGo的游戏性能再提高600 Elo。这部分是由于提高了计算效率,但更重要的是,双重目标将网络调整为支持多个用例的通用表示形式。
METHODS
Reinforcement learning.
主要包括策略迭代过程(即策略评估与策略改进)。AlphaGo Zero selfplay算法可以理解为一种近似的策略迭代方案,其中MCTS用于策略改进和策略评估。 策略改进始于神经网络策略,根据该策略的建议执行MCTS,然后将(更强大的)搜索策略投影回神经网络的功能空间。 策略评估应用于(更强大的)搜索策略:selfplay的结果也被投射回神经网络的功能空间。 这些投影步骤是通过训练神经网络参数以分别匹配搜索概率和selfplay结果来实现的。
Self-play reinforcement learning in games.
zero-sum,perfect information。
MCTS可以被视为selfplay强化学习的一种形式。搜索树的节点包含搜索过程中遇到位置的值函数,这些值被更新以预测自玩模拟游戏的获胜者。
Domain knowledge.
- 完美的围棋规则知识。用于在MCTS中得到执行某一动作后的下一状态,以及判断终止状态;
- 在MCTS模拟和自我训练中使用Tromp–Taylor评分。 这是因为如果游戏在解决边界之前终止,则人类分数(中文,日文或韩文规则)的定义不明确;
- 将描述位置的输入特征构造为19×19的图像,即神经网络结构与棋盘的网格结构相匹配;
- Go的规则在旋转和反射下是不变的,对于颜色转置也是不变的。
AlphaGo Zero从神经网络的随机初始参数开始。神经网络架构基于图像识别的最新技术,并相应地选择了用于训练的超参数。 MCTS搜索参数是通过高斯过程优化选择的,以便使用在初步运行中训练的神经网络来优化AlphaGo Zero的selfplay性能。 对于较大的运行(40个块,40天),使用在较小的运行(20个块,3天)中训练的神经网络对MCTS搜索参数进行了重新优化。
Self-play training pipeline.
AlphaGo Zero的self-play training pipeline由三个主要组件组成,所有这些组件都是并行异步执行的。
- 神经网络参数 θ i θ_i θi从最近的selfplay数据不断优化;
- 持续评估AlphaGo Zero玩家 α θ i α_{θ_i} αθi;
- 到目前为止,表现最佳的播放器 α θ ∗ α_{θ_∗} αθ∗用于生成新的selfplay数据。
Optimization.
每个神经网络 f θ i f_{θ_i} fθi批量大小是每个woker32个,最小批量大小为2,048。 从最近的500,000场selfplay的所有位置中随机地对每个mini-batch数据进行统一采样。 使用等式(1)中的损失,通过具有动量和学习速率退火的随机梯度下降来优化神经网络参数。 根据扩展数据表3中的标准时间表对学习率进行退火。动量参数设置为0.9。 交叉熵和MSE损失的权重相等(这是合理的,因为奖励是按比例缩放的, r ∈ { − 1 , + 1 } r∈\{-1,+ 1\} r∈{−1,+1}),L2正则化参数设置为c = 10-4。 优化过程每1,000个训练步骤产生一个新的检查点。 这个检查点由评估者评估,并且可以用于生成下一批selfplay。
Evaluator.
为确保始终生成最佳质量的数据,我们在将其用于数据生成之前,针对当前最佳网络 f θ ∗ f_{\theta_*} fθ∗评估每个新的神经网络检查点。 通过MCTS搜索 α θ i α_{θ_i} αθi的性能来评估神经网络 f θ i f_{θ_i} fθi,MCTS搜索 α θ i α_{θ_i} αθi使用 f θ i f_{θ_i} fθi来评估叶子位置和先验概率(请参阅搜索算法)。 每次评估包括400场比赛,使用具有1600次模拟的MCTS通过无限的温度 τ → 0 τ→0 τ→0(即,我们确定地选择访问次数最多的棋局,以尽可能发挥最大的优势)来选择棋局。 如果新玩家以大于55%的赢率获胜(避免单独选择噪音),则它将成为最佳玩家 α θ ∗ α_{θ_∗} αθ∗,并随后用于selfplay的产生,并成为后续比较的基准。
Self-play.
由evaluator选择的最佳当前player α θ ∗ α_{θ_∗} αθ∗用于生成数据。 在每次迭代中, α θ ∗ α_{θ_∗} αθ∗进行25,000场selfplay,使用1,600个MCTS模拟选择每个动作(每次搜索大约需要0.4 s)。 对于每个游戏的前30个动作,温度设置为 τ = 1 τ= 1 τ=1; 这样可以根据他们在MCTS中的访问次数按比例选择动作,并确保遇到各种各样的位置。 在游戏的其余部分,将使用无穷小的温度, τ = 0 τ= 0 τ=0。通过在根节点 s 0 s_0 s0中的先验概率上加上Dirichlet噪声, P ( s , a ) = ( 1 − ε ) p a + ε η a P(s,a)=(1-ε)p_a +εη_a P(s,a)=(1−ε)pa+εηa,其中 η 〜 D i r ( 0.03 ) η〜Dir(0.03) η〜Dir(0.03), ε = 0.25 ε= 0.25 ε=0.25,可以进行进一步的探索。 这种噪音确保可以尝试所有动作,但是搜索仍可能否决不良动作。为了节省计算量,显然输了的游戏都被放弃了。放弃阈值 v r e s i g n v_{resign} vresign被自动选择,以将误报率(如果AlphaGo没有放弃,本可以获胜的游戏)保持在5%以下。为了衡量误报,我们在10%的self-play游戏中禁用放弃,并一直玩到终止。
Search algorithm.
搜索树中的每个节点 s s s都包含所有合法动作 a ∈ A ( s ) a∈A(s) a∈A(s)的边 ( s , a ) (s,a) (s,a)。每个边存储一组统计信息:
![]()
其中 N ( s , a ) N(s,a) N(s,a)是访问次数, W ( s , a ) W(s,a) W(s,a)是总动作值, Q ( s , a ) Q(s,a) Q(s,a)是平均动作值, P ( s , a ) P(s,a) P(s,a)是选择该边的先验概率 。 在单独的搜索线程上并行执行多个模拟。 该算法通过在三个阶段上迭代进行(图2a–c),然后选择要进行的移动(图2d)。
Select (Fig. 2a).
选择阶段几乎与AlphaGo相同。 这里简要介绍一下完整性。 每个模拟的第一个树内阶段从搜索树的根节点 s 0 s_0 s0开始,当模拟到达在时间步长 L L L的叶节点 s L s_L sL时结束。在每个时间步长 t < L t
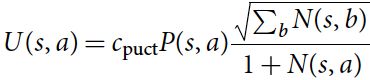
c p u c t c_{puct} cpuct是确定勘探水平的常数; 此搜索控制策略最初会选择具有较高先验概率和较低访问量的动作,但渐近地会选择具有较高动作价值的动作。
Expand and evaluate (Fig. 2b).
将叶子节点 s L s_L sL添加到队列中以进行神经网络评估, ( d i ( p ) , v ) = f θ ( d i ( s L ) ) (d_i(p),v)=f_θ(d_i(s_L)) (di(p),v)=fθ(di(sL)),其中 d i d_i di是从 [ 1..8 ] [1..8] [1..8]中的 i i i随机选择的二面镜像或旋转。 8]。 队列中的位置由神经网络使用最小批处理大小8来评估; 搜索线程将被锁定,直到评估完成。 叶节点被展开,每个边 ( s L , a ) (s_L,a) (sL,a)初始化为 { N ( s L , a ) = 0 , W ( s L , a ) = 0 , Q ( s L , a ) = 0 , P ( s L , a ) = p a } \{N(s_L,a)= 0,W(s_L,a)= 0,Q(s_L,a)= 0,P(s_L,a) = p_a\} {N(sL,a)=0,W(sL,a)=0,Q(sL,a)=0,P(sL,a)=pa}; 然后backup值 v v v。
Backup (Fig. 2c).
在每个步骤 t ≤ L t≤L t≤L的反向传递中更新边的统计信息。访问计数递增 N ( s t , a t ) = N ( s t , a t ) + 1 N(s_t,a_t)= N(s_t,a_t)+ 1 N(st,at)=N(st,at)+1,并且将动作值更新为平均值, W ( s t , a t ) = W ( s t , a t ) + v , Q ( s t , a t ) = W ( s t , a t ) N ( s t , a t ) W(s_t,a_t)=W(s_t,a_t)+v, Q(s_t,a_t)=\frac{W(s_t,a_t)}{N(s_t,a_t)} W(st,at)=W(st,at)+v,Q(st,at)=N(st,at)W(st,at)。 我们使用virtual loss确保每个线程计算不同的节点。
Play (Fig. 2d).
搜索结束时,AlphaGo Zero选择一个根位置 s 0 s_0 s0的移动 a a a,该移动 a a a与它的访问计数的指数成正比, π ( a ∣ s 0 ) = N ( s 0 , a ) 1 / τ / Σ b N ( s 0 , b ) 1 / τ π(a|s_0)= N(s_0,a)^{1/τ}/Σ_bN(s_0,b)^{1/ τ} π(a∣s0)=N(s0,a)1/τ/ΣbN(s0,b)1/τ,其中 τ τ τ是控制勘探水平的温度参数。 搜索树将在随后的时间步中重用:所选动作对应的子节点成为新的根节点; 该子树下的子树及其所有统计信息都将保留,而树的其余部分将被丢弃。 如果其根价值和最佳子价值低于阈值 v r e s i g n v_{resign} vresign,则AlphaGo Zero将退出。
与AlphaGo Fan和AlphaGo Lee中的MCTS相比,主要区别在于AlphaGo Zero不使用任何rollouts。 它使用单个神经网络而不是单独的策略和价值网络; 叶节点始终被扩展,而不是使用动态扩展; 每个搜索线程仅等待神经网络评估,而不是异步执行评估和备份。 而且没有树政策。 在大型(40个blocks,40天)的AlphaGo Zero实例中也使用了transposition table。
Neural network architecture.
神经网络的输入是一个19×19×17图像堆栈,其中包含17个二进制特征平面。 八个特征平面 X t X_t Xt由指示当前玩家的棋子是否存在的二进制值组成(如果交叉点 i i i在时间步长 t t t时包含玩家颜色的石头,则 X i t = 1 X_i^t= 1 Xit=1;如果交叉点为空,包含对手棋子,或者 t < 0 t <0 t<0,则为0)。 另外8个特征平面 Y t Y_t Yt代表对手棋子的相应特征。 最后一个特征平面C代表所play的颜色,并且如果执黑子则常量值为1,如果执白子,则常量值为0。 这些平面串联在一起以提供输入特征 s t = [ X t , Y t , X t − 1 , Y t − 1 , . . . , X t − 7 , Y t − 7 , C ] s_t = [X_t,Y_t,X_{t-1},Y_{t-1},...,X_{t-7},Y_{t-7},C] st=[Xt,Yt,Xt−1,Yt−1,...,Xt−7,Yt−7,C]。 历史特征 X t X_t Xt, Y t Y_t Yt是必需的,因为Go不能完全从当前的棋子上观察到,因为禁止重复。 类似地,颜色特征C是必需的,因为无法观察到komi。
输入特征 s t s_t st由residual tower处理,residual tower由单个卷积块和19个或39个残差块组成。卷积block应用了以下模块:

residual tower的输出传递到两个单独的“头”中,以计算策略和价值。 策略head应用以下模块:

对应于所有交叉点和pass的logit概率。
价值head应用以下模块:


在20或40块网络中,残差塔的总网络深度分别为39或79个参数化层,加上策略头的额外2层和价值头的3层。