QCM2150 android10平台 uart移植
前言
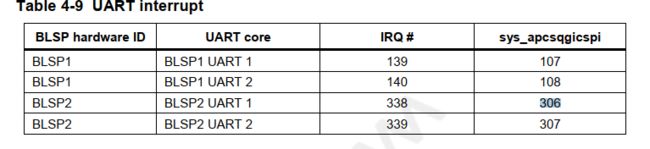
我们当前使用该平台的GPIO16 GPIO17来做2线高速uart通信。如下图所示可以首先确认基地址:

一、BP侧修改
trustzone_images/core/buses/qup_accesscontrol/bear/config/QUPAC_8917_Access.xml
153 <device id=BLSP_UART_3_DEV_ACCESS>
154 <props name="CHIP_BUS_INDEX" type=DALPROP_ATTR_TYPE_UINT32> BLSP_UART_3 </props>
155 <props name="BUS_PROTOCOL" type=DALPROP_ATTR_TYPE_UINT32> PROTOCOL_UART_2_LINE </props>-------PROTOCOL_UART_4_LINE 4线改2线
156 <props name="IS_GPIO_PROTECTED" type=DALPROP_ATTR_TYPE_UINT32> 0 </props>
157 <props name="GPIO_NUMBERS" type=DALPROP_ATTR_TYPE_BYTE_SEQ> 16, 17, end </props>-------------被修改16, 17, 18, 19, end
158 <props name="GPIO_RG_INDEX" type=DALPROP_ATTR_TYPE_BYTE_SEQ> end </props>
159 <props name="SUBSYSTEM_ID" type=DALPROP_ATTR_TYPE_UINT32> AC_NONE </props>
160 <props name="IS_PERSISTENT" type=DALPROP_ATTR_TYPE_UINT32> 0 </props>
161 <props name="CORE_RG_INDEX" type=DALPROP_ATTR_TYPE_UINT32> 7 </props>
162 </device>
编译生成devcfg 下载进去
二、AP修改
从下图看到dtsi 各个参数怎么配置的
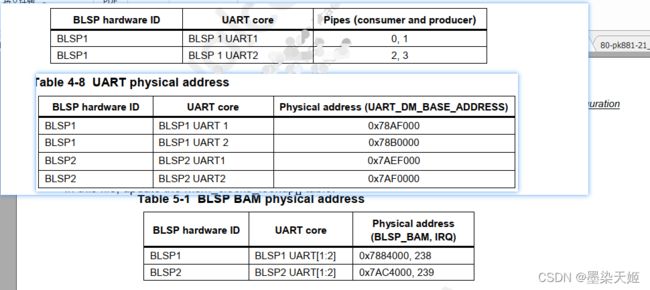
对应msm8917.dtsi
blsp2_uart1: serial@0x7aef000 {
compatible = "qcom,msm-hsuart-v14";
reg = <0x7aef000 0x200>,
<0x7ac4000 0x1f000>;
reg-names = "core_mem", "bam_mem";
interrupt-names = "core_irq", "bam_irq";
#address-cells = <0>;
interrupt-parent = <&blsp2_uart1>;
interrupts = <0 1>;
#interrupt-cells = <1>;
interrupt-map-mask = <0xffffffff>;
interrupt-map = <0 &intc 0 306 0
1 &intc 0 239 0>;
//qcom,inject-rx-on-wakeup;
//qcom,rx-char-to-inject = <0xfd>;
qcom,bam-tx-ep-pipe-index = <0>;
qcom,bam-rx-ep-pipe-index = <1>;
qcom,master-id = <84>;
clock-names = "core_clk", "iface_clk";
clocks = <&clock_gcc clk_gcc_blsp2_uart1_apps_clk>,
<&clock_gcc clk_gcc_blsp2_ahb_clk>;
pinctrl-names = "sleep", "default";
pinctrl-0 = <&blsp2_uart1_sleep>;
pinctrl-1 = <&blsp2_uart1_active>;
qcom,msm-bus,name = "blsp2_uart1";
qcom,msm-bus,num-cases = <2>;
qcom,msm-bus,num-paths = <1>;
qcom,msm-bus,vectors-KBps =
<84 512 0 0>,
<84 512 500 800>;
status = "ok";
};
对应msm8917-pinctrl.dtsi
blsp2_uart1 {
blsp2_uart1_active: blsp2_uart1_active {
mux {
pins = "gpio16", "gpio17";
function = "blsp_uart5";
};
config {
pins = "gpio16", "gpio17";
drive-strength = <2>;
bias-disable;
};
};
blsp2_uart1_sleep: blsp2_uart1_sleep {
mux {
pins = "gpio16", "gpio17";
function = "blsp_uart5";
};
config {
pins = "gpio16", "gpio17";
drive-strength = <2>;
bias-pull-down;
};
};
};
注意需要把代码中被踩到的GPIO去掉。
DEBUG
1.如果测试有能写不能读,请将100改为-1;如此可以禁止休眠
kernel/msm-4.9/drivers/tty/serial/msm_serial_hs.c
@@ -3320,7 +3320,7 @@ static void msm_serial_hs_rt_init(struct uart_port *uport)
MSM_HS_INFO("%s(): Enabling runtime pm", __func__);
pm_runtime_set_suspended(uport->dev);
- pm_runtime_set_autosuspend_delay(uport->dev, 100);
+ pm_runtime_set_autosuspend_delay(uport->dev, -1);
pm_runtime_use_autosuspend(uport->dev);
mutex_lock(&msm_uport->mtx);
msm_uport->pm_state = MSM_HS_PM_SUSPENDED;
2.利用测试程序进行测试,tx rx连接电脑进行测试

另外通过测试脚本也可以看到发送接收时间是不是正常,100ms就是异常了
