AcWing算法基础课 Level-2 第三讲 搜索与图论


单链表
#include 双链表

#include 树与图的深度优先遍历
树的重心

- 树是一种特殊的图,无向图又是特殊的有向图;因此考虑有向图如何存储即可;有向图的存储 :稠密图->邻接矩阵;邻接表,存储每个点可以到达哪些点
- 图的邻接表存储方式是为每一个结点开个表,存的意思是从这个点可以走到哪些点,这个单链表内部点的顺序是无关紧要的
- n个点所以是n-1条边;cstring头文件;边数这里设置为点数的两倍,在开数组时注意;st数组记录是否遍历过该点,在遍历一个点所有能到达的点的过程中,为了避免走回头路,也要用到st数组;注意当前这颗子树的大小 和 去掉这个点后最大联通块 之间的关系;图用的是多条单链表,所以注意每次都要初始化h数组;无向图,所以add两次;这里随便挑一个点都可以开始dfs,树从哪个点都可以开始当根
#include 树与图的广度优先遍历
图中点的层次
- 建图然后bfs;dist表示距离,-1表示走不到,初始化为-1
#include 拓扑排序
有向图的拓扑序列
- 有向无环图也被称为拓扑图
- 拓扑序列 :所有的边都从前指向后,那么所有入度为0的点都可以作为起点
#include #include Dijkstra
Dijkstra求最短路 I
- 稠密图,邻接矩阵;稀疏图,邻接表
- 建图时要把所有边初始化为正无穷,,为了应对重边,每次保留最短的边;先将所有距离初始化为正无穷,起点距离为0,遍历n-1轮,每轮确定一个点,找到未标记的点中距离最小的,然后用这个点更新其它点的距离,再标记这个距离最小的点,表示已经用它更新过
- 每个点只能被用来更新其它点一次
- 基于贪心思想,只适用于所有边的长度都是非负数的图
#include Dijkstra求最短路 II

- 稀疏图 -> 邻接表(相比多了w数组记录权值
- 用邻接表存图,重边无所谓
- priority_queue在queue头文件中,小根堆默认按照第一个权值从小到大排序
- 小根堆的写法
- 每次找全局最小且未被标记过的去更新其它点的dist;所以在每次更新的时候顺便把新的dist和对应的点放进去
- 同上,每一个点只会被用来松弛其它边一次,所以只会进优先队列一次;在松弛其它边的时候,如果松弛成功,就将点进入优先队列
#include bellman-ford
有边数限制的最短路
- memcpy(last, dist, sizeof dist)中last数组是上一轮中dist数组的备份,是为了防止串联更新,因为bellmanford是求有边数限制的最短路,而spfa是没有边数限制的,所以不需要拷贝上一轮。
- Bellman - ford 算法是求含负权图的单源最短路径的一种算法,效率较低,代码难度较小。其原理为连续进行松弛,在每次松弛时把每条边都更新一下,若在 n-1 次松弛后还能更新,则说明图中有负环,因此无法得出结果,否则就完成。
- 在下面代码中,是否能到达n号点的判断中需要进行if(dist[n] > INF/2)判断,而并非是if(dist[n] == INF)判断,原因是INF是一个确定的值,并非真正的无穷大,会随着其他数值而受到影响,dist[n]大于某个与INF相同数量级的数即可
- bellman - ford算法擅长解决有边数限制的最短路问题,时间复杂度 O(nm),其中n为点数,m为边数
- 存边方式独特,边数限制,拷贝上一轮,大于判断
#include spfa
spfa求最短路
- spfa被称为队列优化的bellmanford算法,
- 建立一个队列,最初队列中只包含起点;取出队头x,扫描它的所有出边(x,y,z),如果能被松弛,则松弛dist[y],同时如果y不在队列中,将y放入队列中(每次取出队头的时候也要改变st数组);
- 一个结点可能被入队,出队多次;这个队列避免了bellmanford算法中对不需要拓展的结点的冗余扫描,在稀疏图上运行效率较高,为 O ( k m ) O(km) O(km)级别,k是一个较小的常数,但在稠密图或者特殊构造的网格图上,仍可能退化成 O ( n m ) O(nm) O(nm)
- st为true的点也可能被再次更新,所以更新的时候不需要判断是否!st
- st数组记录这个点当前是否在队列中
- 队列中都是由起点更新到的点,不存在bellmanford中未更新到的点同样被边更新的情况,所以spfa中等于判断就可以,不像bellman中是大于判断
#include spfa判断负环

- dist和cnt数组都不需要被初始化,dist数组代表当前从1到x的最短路径长度,cnt数组代表当前从1到x的边的数量
- 一开始就把所有点都放到队列里,只有在松弛的时候才会判断如果不在队列中再把它放入队列中,如果松弛时发现cnt也就是边数>=n,说明点大于n,说明有负权回路
#include Floyd
Floyd求最短路
- D[k, i, j]表示“经过若干个编号不超过k的结点“从i到j的最短路径,该问题可划分为两个子问题,经过编号不超过k-1的点从i到j,或者从i先到k再到j, D [ k , i , j ] = m i n ( D [ k − 1 , i , j ] , D [ k − 1 ] [ i ] [ k ] + D [ k − 1 ] [ k ] [ j ] ) D[k,i,j]=min(D[k-1,i,j],D[k-1][i][k]+D[k-1][k][j]) D[k,i,j]=min(D[k−1,i,j],D[k−1][i][k]+D[k−1][k][j]),初值为 D [ 0 , i , j ] = A [ i , j ] D[0,i,j]=A[i,j] D[0,i,j]=A[i,j],其中A[i,j]是开头定义的邻接矩阵
- 与背包问题的状态转移方程类似,k这一维可被省略 D [ i , j ] = m i n ( D [ i , j ] , D [ i ] [ k ] + D [ k ] [ j ] ) D[i,j]=min(D[i,j],D[i][k]+D[k][j]) D[i,j]=min(D[i,j],D[i][k]+D[k][j]),最终D[i][j]就保存了从i到j的最短路长度
#include - floyd距离和邻接矩阵中两点之间边的距离用的是同一个数组,
- 这里也可以用0x3f3f3f3f,之所以能用1e9应该是这里的总边长才2e8
- 邻接矩阵的初始化,这里多了个0,值得注意
- 这里仍然是判断大于而不是判断等于,也许还是因为不是从起点更新起的,
Prim
Prim算法求最小生成树
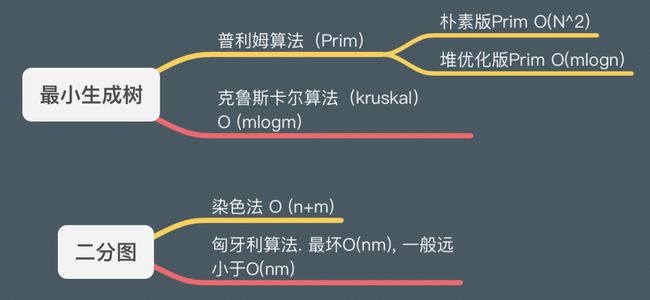
- O ( n 2 ) O(n^2) O(n2)。堆优化版也不如kruskal方便,所以Prim算法主要用于稠密图,尤其是完全图的最小生成树的求解。
- Prim总是维护最小生成树的一部分。最初,Prim算法仅确定1号节点属于最小生成树;把元素从剩余节点集合中删除,加入到已经属于最小生成树的节点集合中去,并把两个端点分别属于这两个集合中的权值最小的点累加到答案中。
- 可以类别Dijkstra,用一个数组标记节点是否属于集合T,每次从未标记的节点中选择d值最小的,把它标记,同时扫描所有出边,更新另一个端点的d值。
#include Kruskal
Kruskal算法求最小生成树
- 从边带权的无向图中选n个点和n-1条本来就有的边构成的无向连通子图称为生成树,在此基础上边的权值之和最小的称为最小生成树
- 定理 :任意一颗最小生成树一定包含无向图中权值最小的边
- Kruskal算法总是维护无向图的最小生成森林
- 在任意时刻,Kruskal算法从剩余的边中选一条权值最小的,并且这条边的两个端点属于生成森林中两颗不同的树(不连通),把该边加入该森林。图中节点的连通情况可以用并查集维护
- 流程 :建立并查集;把所有边按权值排序从小到大,依次扫描每条边;若两个端点属于同一个集合,则忽略这条边;否则,合并两个端点所在的集合,并将权值累加到答案中
- 虽然Kruskal算法的时间复杂度局限在于它第一步要使用的库里的快排,o(mlog(m)),但快排常数非常小,所以Kruskal很快
#include 染色法判定二分图
染色法判定二分图
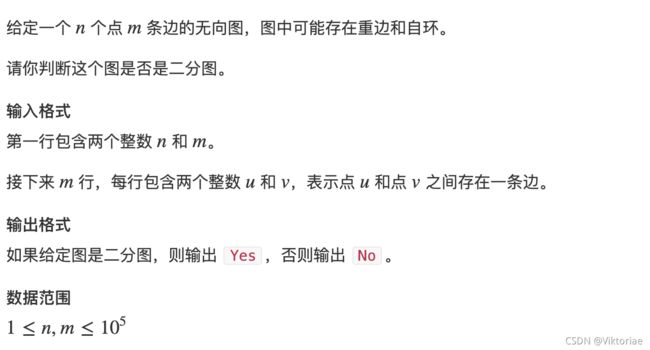
- 二分图 :当且仅当图中没有奇数环,划分为两个集合,集合内部没有边
#include 匈牙利算法
二分图的最大匹配
- “任意两条边都没有公共端点”的边的集合被称为图的一组匹配。在二分图中,包含边数最多的一组匹配被称为二分图的最大匹配。
- 二分图的一组匹配S是最大匹配,当且仅当图中不再存在S的增广路
- 匈牙利算法基于贪心思想,当一个点成为匹配点后,最多因为增广路而更换匹配对象,不会再变回非匹配点
- 对于每个左部节点,寻找增广路最多遍历整张二分图一次,所以 O ( n m ) O(nm) O(nm)
#include