STM32外设系列—MPU6050角度传感器
文章作者:二土电子
关注公众号获取更多资料!
期待大家一起学习交流!
文章目录
- 一、MPU6050简介
- 二、MPU6050寄存器简介
-
- 2.1 PWR_MGMT_1寄存器
- 2.2 GYRO_CONFIG寄存器
- 2.3 ACCEL_CONFIG寄存器
- 2.4 PWR_MGMT_2寄存器
- 三、程序设计
-
- 3.1 I2C程序设计
- 3.2 MPU6050初始化程序
- 3.3 DMP相关程序
- 3.4 获取三轴角度信息
- 四、实现效果
一、MPU6050简介
MPU6050是由InvenSense公司生产的全球首款整合性六轴运动处理模块,它可以实时获取运动物体的在三维坐标系内的偏转角度,如图所示。
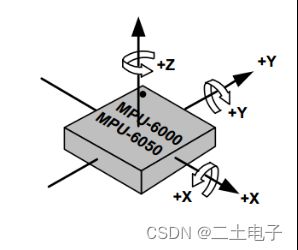
其中roll为绕X轴偏转的角度,pitch为绕Y轴偏转的角度,yaw为绕Z轴偏转的角度。
MPU6050通过IIC协议与单片机进行通讯,传递偏移角度信息。虽然MPU6050角度传感器体积小,功能强大,但是其内部噪音较大,如果不进行滤波,将会对获取到的偏转角度的准确性带来严重的影响。为此,MPU6050芯片内部集成了一个DMP数据处理模块,该模块已经内置了滤波算法,使MPU6050输出数据的准确性得到了保障。
之所以说MPU6050是六轴运动处理模块,是因为它不仅集成了三轴陀螺仪,还集成了一个三轴加速度计,不仅可以输出三轴角度信息,还可以输出三轴加速度信息。除此之外,MPU6050还集成了一个温度传感器,可以输出温度信息。
下面我们简单介绍一下MPU6050的引脚。通常我们买到的MPU6050大概是这个样子

- VCC
电源正极,通常接3.3V - GND
电源地 - SCL
IIC的时钟线 - SDA
IIC的数据线 - XDA
外接IIC设备的数据线 - XCL
外接IIC设备的时钟线 - AD0
控制IIC从属地址,接地时地址为0X68,如果接VCC的话,从属地址为0X69 - INT
中断数字输出
通过对MPU6050的引脚介绍我们可以知道,MPU6050可以外接一个IIC设备,通常可以外接一个三轴的磁力计来实现完整的九轴输出。
这里放一下MPU60X0数据手册中的系统结构图,基本信息上面已经介绍了,就不再进行详细标注了

二、MPU6050寄存器简介
在开始学习怎么使用MPU6050之前,我们先简单看一下它的一些寄存器。
这里贴一下MPU6050的数据手册和寄存器手册,但是只有英文版的,如果大家只是想了解一些关键寄存器的介绍,又不想自己看英文手册的话,可以继续往下看,下面会有一些关键寄存器的中文介绍。
链接:https://pan.baidu.com/s/1r-xDm7QUp5NfVRPF4IMX9g
提取码:ertu
2.1 PWR_MGMT_1寄存器
首先看一下寄存器手册中对它的介绍。

- DEVICE_RESET
当该位设置为1时,MPU6050会将所有内部寄存器重置为其默认值。在重置完成后,该位将自动清除为0。 - SLEEP
当该位设置成1时,MPU6050进入休眠模式。 - CYCLE
当这个位被设置为1并且睡眠被禁用时,MPU-60X0将在睡眠模式和醒来之间循环,以由LP_WAKE_CTRL(寄存器108)确定的速率从加速度计中获取单个数据样本。 - TEMP_DIS
当设置为1时,此位将禁用温度传感器。 - CLKSEL
3位无符号值。指定该设备的时钟源。
2.2 GYRO_CONFIG寄存器

该寄存器用于触发陀螺仪自检,并配置陀螺仪的量程范围。陀螺仪自检允许用户测试陀螺仪的机械和电气部分。通过控制该寄存器的XG_ST、YG_ST和ZG_ST位,可以激活每个陀螺仪轴的自检。每个轴的自检可以独立进行,也可以同时进行。
下面我们仔细看一下每一位的作用
- XG_ST
设置此位会开启X轴陀螺仪自检。 - YG_ST
设置此位会开启Y轴陀螺仪自检。 - ZG_ST
设置此位会开启Z轴陀螺仪自检。 - FS_SEL
2位无符号值。选择陀螺仪的量程范围。
| FS_SEL | 陀螺仪传感器满量程范围 |
|---|---|
| 0 | ±250°/s |
| 1 | ±500°/s |
| 2 | ±1000°/s |
| 3 | ±2000°/s |
这里°/s是角速度的单位。
2.3 ACCEL_CONFIG寄存器

该寄存器用于触发加速度计的自检,并配置加速度计的量程范围。加速度计自检允许用户测试加速度计的机械和电气部分。通过控制该寄存器的XA_ST、YA_ST和ZA_ST位,可以激活每个加速度计轴的自检。每个轴的自检可以独立进行,也可以同时进行。
下面我们仔细看一下每一位的作用
- XA_ST
当设置为1时,X轴加速度计进行自检。 - YA_ST
当设置为1时,Y轴加速度计进行自检。 - ZA_ST
当设置为1时,Z轴加速度计进行自检。 - AFS_SEL
2位无符号值。选择加速度计的量程范围。
| AFS_SEL | 加速度计满量程范围 |
|---|---|
| 0 | ±2g |
| 1 | ±4g |
| 3 | ±8g |
| 4 | ±16g |
2.4 PWR_MGMT_2寄存器

此寄存器允许用户在仅加速计低功率模式下配置唤醒频率。这个寄存器还允许用户将加速度计和陀螺仪的各个轴进入待机模式。
- STBY_XA
当设置为1时,该位将使X轴加速度计进入待机模式。 - STBY_YA
当设置为1时,该位将使Y轴加速度计进入待机模式。 - STBY_ZA
当设置为1时,该位将使Z轴加速度计进入待机模式。 - STBY_XG
当设置为1时,此位将使X轴陀螺仪进入待机模式。 - STBY_YG
当设置为1时,该位将使Y轴陀螺仪进入待机模式。 - STBY_ZG
当设置为1时,此位将使Z轴陀螺仪进入待机模式。
三、程序设计
本次的程序设计使用的是STM32F103C8T6作主控,串口输出三轴角度信息。
3.1 I2C程序设计
MPU6050使用的是I2C通信,对于I2C这里不再作详细介绍,具体可以看博主STM32外设系列OLED中对I2C的介绍,这里直接给出程序设计
drv层.c文件
/*
*==============================================================================
* 声明:本程序由CSDN博主“二土电子”编写整理,部分程序由外部参考借鉴。
* 如需更多程序资源或STM32教程,可微信公众号搜索“二土电子”关注
* STM32学习交流群:479667779,更多优质资源,等你来发现!
* 2023.11.09 ---------------------------------------------------- code by ertu
*==============================================================================
*/
#include "drv_mpu6050.h"
#include "delay.h"
/*
*==============================================================================
*函数名称:Drv_Mpu6050_Gpio_Init
*函数功能:初始化MPU6050引脚
*输入参数:无
*返回值:无
*备 注:这里不再给AD0另外接一个引脚,也就是从机地址固定为0X68
*==============================================================================
*/
void Drv_Mpu6050_Gpio_Init (void)
{
GPIO_InitTypeDef GPIO_InitStructure; // 定义结构体
// 开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
// 配置结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽式输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_6 | GPIO_Pin_7); // 拉高
}
/*
*==============================================================================
*函数名称:MPU_IIC_Delay
*函数功能:MPU6050 IIC延时
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void MPU_IIC_Delay (void)
{
delay_us(2);
}
/*
*==============================================================================
*函数名称:MPU_IIC_Start
*函数功能:MPU6050 IIC发送起始信号
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void MPU_IIC_Start (void)
{
MPU_SDA_OUT(); // SDA输出
MPU_IIC_SDA = 1;
MPU_IIC_SCL = 1;
MPU_IIC_Delay();
MPU_IIC_SDA = 0;
MPU_IIC_Delay();
MPU_IIC_SCL = 0;
}
/*
*==============================================================================
*函数名称:MPU_IIC_Stop
*函数功能:MPU6050 IIC发送终止信号
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void MPU_IIC_Stop (void)
{
MPU_SDA_OUT(); // SDA输出
MPU_IIC_SCL = 0;
MPU_IIC_SDA = 0;
MPU_IIC_Delay();
MPU_IIC_SCL = 1;
MPU_IIC_SDA = 1;
MPU_IIC_Delay();
}
/*
*==============================================================================
*函数名称:MPU_IIC_Wait_Ack
*函数功能:MPU6050 IIC等待应答信号
*输入参数:无
*返回值:0:收到应答信号;1:未收到应答信号
*备 注:无
*==============================================================================
*/
u8 MPU_IIC_Wait_Ack (void)
{
u8 ucErrTime = 0;
MPU_SDA_IN(); // SDA输入
MPU_IIC_SDA = 1;
MPU_IIC_Delay();
MPU_IIC_SCL = 1;
MPU_IIC_Delay();
while(MPU_READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_SCL = 0; // 时钟输出0
return 0;
}
/*
*==============================================================================
*函数名称:MPU_IIC_Ack
*函数功能:MPU6050 IIC发送应答信号
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void MPU_IIC_Ack (void)
{
MPU_IIC_SCL = 0;
MPU_SDA_OUT(); // SDA输出
MPU_IIC_SDA = 0;
MPU_IIC_Delay();
MPU_IIC_SCL = 1;
MPU_IIC_Delay();
MPU_IIC_SCL = 0;
}
/*
*==============================================================================
*函数名称:MPU_IIC_NAck
*函数功能:MPU6050 IIC发送非应答信号
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void MPU_IIC_NAck (void)
{
MPU_IIC_SCL = 0;
MPU_SDA_OUT(); // SDA输出
MPU_IIC_SDA = 1;
MPU_IIC_Delay();
MPU_IIC_SCL = 1;
MPU_IIC_Delay();
MPU_IIC_SCL = 0;
}
/*
*==============================================================================
*函数名称:MPU_IIC_Send_Byte
*函数功能:MPU6050 IIC发送一个字节
*输入参数:无
*返回值:txd:发送的字节
*备 注:无
*==============================================================================
*/
void MPU_IIC_Send_Byte (u8 txd)
{
u8 t;
MPU_SDA_OUT(); // SDA输出
MPU_IIC_SCL = 0; // 拉低时钟开始数据传输
for(t = 0;t < 8;t ++)
{
MPU_IIC_SDA = (txd & 0x80) >> 7;
txd <<= 1;
MPU_IIC_SCL = 1;
MPU_IIC_Delay();
MPU_IIC_SCL = 0;
MPU_IIC_Delay();
}
}
/*
*==============================================================================
*函数名称:MPU_IIC_Read_Byte
*函数功能:MPU6050 IIC读取一个字节
*输入参数:ack = 1时,发送ACK;ack = 0时,发送NACK
*返回值:接收到的一个自己数据
*备 注:无
*==============================================================================
*/
u8 MPU_IIC_Read_Byte (u8 ack)
{
u8 i,receive = 0;
MPU_SDA_IN(); // SDA输入
for(i = 0;i < 8;i ++ )
{
MPU_IIC_SCL = 0;
MPU_IIC_Delay();
MPU_IIC_SCL = 1;
receive <<= 1;
if(MPU_READ_SDA)
{
receive++;
}
MPU_IIC_Delay();
}
if (!ack)
{
MPU_IIC_NAck(); // 发送NACK
}
else
{
MPU_IIC_Ack(); // 发送ACK
}
return receive;
}
/*
*==============================================================================
*函数名称:MPU_Write_Len
*函数功能:IIC在固定地址开始连续写入数据
*输入参数:addr:从设备地址;reg:寄存器地址;len:写入长度;
*buf:要写入的数据地址
*返回值:0:写入成功;1:写入失败
*备 注:无
*==============================================================================
*/
u8 MPU_Write_Len (u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr << 1) | 0); // 发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) // 等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); // 写寄存器地址
MPU_IIC_Wait_Ack(); // 等待应答
for(i = 0;i < len;i ++)
{
MPU_IIC_Send_Byte(buf[i]); //发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_Stop();
return 0;
}
/*
*==============================================================================
*函数名称:MPU_Read_Len
*函数功能:IIC在固定地址开始连续读取数据
*输入参数:addr:从设备地址;reg:寄存器地址;len:读取长度;
*buf:要读取的数据存储地址
*返回值:0:读取成功;1:读取失败
*备 注:无
*==============================================================================
*/
u8 MPU_Read_Len (u8 addr,u8 reg,u8 len,u8 *buf)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr << 1) | 0); // 发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) // 等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); // 写寄存器地址
MPU_IIC_Wait_Ack(); // 等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr << 1) | 1); // 发送器件地址+读命令
MPU_IIC_Wait_Ack(); // 等待应答
while(len)
{
if(len == 1)*buf = MPU_IIC_Read_Byte(0); // 读数据,发送nACK
else *buf = MPU_IIC_Read_Byte(1); // 读数据,发送ACK
len --;
buf ++;
}
MPU_IIC_Stop(); // 产生一个停止条件
return 0;
}
/*
*==============================================================================
*函数名称:MPU_Read_Len
*函数功能:IIC在固定地址写入一字节数据
*输入参数:reg:寄存器地址;data:数据;
*返回值:0:写入成功;1:写入失败
*备 注:无
*==============================================================================
*/
u8 MPU_Write_Byte(u8 reg,u8 data)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((0X68 << 1) | 0); // 发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) // 等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); // 写寄存器地址
MPU_IIC_Wait_Ack(); // 等待应答
MPU_IIC_Send_Byte(data); // 发送数据
if(MPU_IIC_Wait_Ack()) // 等待ACK
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Stop();
return 0;
}
/*
*==============================================================================
*函数名称:MPU_Read_Byte
*函数功能:IIC在固定地址读取一字节数据
*输入参数:reg:寄存器地址;
*返回值:读取的数据
*备 注:无
*==============================================================================
*/
u8 MPU_Read_Byte (u8 reg)
{
u8 res;
MPU_IIC_Start();
MPU_IIC_Send_Byte((0X68 << 1) | 0); // 发送器件地址+写命令
MPU_IIC_Wait_Ack(); // 等待应答
MPU_IIC_Send_Byte(reg); // 写寄存器地址
MPU_IIC_Wait_Ack(); // 等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((0X68 << 1) | 1); // 发送器件地址+读命令
MPU_IIC_Wait_Ack(); // 等待应答
res=MPU_IIC_Read_Byte(0); // 读取数据,发送nACK
MPU_IIC_Stop(); // 产生一个停止条件
return res;
}
//设置MPU6050的数字低通滤波器
//lpf:数字低通滤波频率(Hz)
//返回值:0,设置成功
// 其他,设置失败
/*
*==============================================================================
*函数名称:Drv_Mpu6050_Set_Lpf
*函数功能:设置MPU6050的数字低通滤波器
*输入参数:lpf:数字低通滤波频率(Hz)
*返回值:0:成功;1:失败
*备 注:无
*==============================================================================
*/
u8 Drv_Mpu6050_Set_Lpf (u16 lpf)
{
u8 data = 0;
if(lpf >= 188)
{
data=1;
}
else if(lpf>=98)
{
data=2;
}
else if(lpf>=42)
{
data=3;
}
else if(lpf>=20)
{
data=4;
}
else if(lpf>=10)
{
data=5;
}
else
{
data=6;
}
return MPU_Write_Byte(MPU_CFG_REG,data); // 设置数字低通滤波器
}
/*
*==============================================================================
*函数名称:Drv_Mpu6050_Set_Rate
*函数功能:设置MPU6050的采样率(假定Fs=1KHz)
*输入参数:rate:4~1000(Hz)
*返回值:0:成功;1:失败
*备 注:无
*==============================================================================
*/
u8 Drv_Mpu6050_Set_Rate (u16 rate)
{
u8 data;
if(rate > 1000)
{
rate=1000;
}
if(rate<4)
{
rate=4;
}
data = 1000 / rate - 1;
data = MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); // 设置数字低通滤波器
return Drv_Mpu6050_Set_Lpf(rate / 2); // 自动设置LPF为采样率的一半
}
drv层.h文件
#ifndef _DRV_MPU6050_H
#define _DRV_MPU6050_H
#include "sys.h" // STM32库函数头文件
// IIC引脚宏定义
#define MPU_IIC_SCL PBout(6) // SCL
#define MPU_IIC_SDA PBout(7) // SDA
#define MPU_READ_SDA PBin(7) // 输入SDA
// SDA方向
#define MPU_SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define MPU_SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}
// MPU6050寄存器
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
void Drv_Mpu6050_Gpio_Init (void); // 初始化MPU6050引脚
void MPU_IIC_Delay (void); // MPU6050 IIC延时
void MPU_IIC_Start (void); // MPU6050 IIC发送起始信号
void MPU_IIC_Stop (void); // MPU6050 IIC发送终止信号
u8 MPU_IIC_Wait_Ack (void); // MPU6050 IIC等待应答信号
void MPU_IIC_Ack (void); // MPU6050 IIC发送应答信号
void MPU_IIC_NAck (void); // MPU6050 IIC发送非应答信号
void MPU_IIC_Send_Byte (u8 txd); // MPU6050 IIC发送一个字节
u8 MPU_IIC_Read_Byte (u8 ack); // MPU6050 IIC读取一个字节
u8 MPU_Write_Len (u8 addr,u8 reg,u8 len,u8 *buf); // IIC在固定地址开始连续写入数据
u8 MPU_Read_Len (u8 addr,u8 reg,u8 len,u8 *buf); // IIC在固定地址开始连续读取数据
u8 MPU_Write_Byte(u8 reg,u8 data); // IIC在固定地址写入一字节数据
u8 MPU_Read_Byte (u8 reg); // IIC在固定地址读取一字节数据
u8 Drv_Mpu6050_Set_Lpf (u16 lpf); // 设置MPU6050的数字低通滤波器
u8 Drv_Mpu6050_Set_Rate (u16 rate); // 设置MPU6050的采样率(假定Fs=1KHz)
#endif
3.2 MPU6050初始化程序
MPU6050初始化程序如下
/*
*==============================================================================
*函数名称:Drv_Mpu6050_Gpio_Init
*函数功能:初始化MPU6050
*输入参数:无
*返回值:0:初始化成功;1:初始化失败;
*备 注:这里不再给AD0另外接一个引脚,也就是从机地址固定为0X68
*==============================================================================
*/
u8 Med_Mpu6050_Init (void)
{
u8 mpu6050Id = 0; // 存储读取的ID(从设备地址)
Drv_Mpu6050_Gpio_Init(); // 初始化GPIO
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); // 复位MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); // 唤醒MPU6050
MPU_Write_Byte(MPU_GYRO_CFG_REG,3 << 3); // 设置陀螺仪满量程范围0:±250°/s;1:±500°/s;2:±1000°/s;3:±2000°/s
MPU_Write_Byte(MPU_ACCEL_CFG_REG,0 << 3); // 设置加速度传感器满量程范围0:±2g;1:±4g;2:±8g;3:±16g
Drv_Mpu6050_Set_Rate(50); // 设置采样率50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); // 关闭所有中断
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); // I2C主模式关闭
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); // 关闭FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); // INT引脚低电平有效
mpu6050Id = MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(mpu6050Id == 0X68) // 器件ID正确
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); // 设置CLKSEL,PLL X轴为参考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); // 加速度与陀螺仪都工作
Drv_Mpu6050_Set_Rate(50); // 设置采样率为50Hz
}
else
{
return 1;
}
return 0;
}
上面的程序是MPU6050初始化函数设计,我们在进行函数设计时加入了一个返回值,如果我们获取到的MPU6050的从机地址是正确的,就返回0,说明MPU6050连接正常,否则说明MPU6050异常。当MPU6050异常时,我们最好设置一个超时检测,防止我们在初始化的时候一直卡在这里。具体的初始化程序设计如下
u8 watCunt = 0; // 超时间检测计数变量
//初始化MPU6050
printf ("MPU6050 Init");
while (Med_Mpu6050_Init())
{
printf (".");
delay_ms(200);
watCunt = watCunt + 1;
// 超时跳出
if (watCunt >= 150)
{
printf ("\r\n");
printf ("DMP Error!\r\n");
break;
}
}
printf ("\r\n");
printf ("MPU6050 Init OK!\r\n");
3.3 DMP相关程序
DMP相关程序我们直接使用大家常见的例程中的一些文件,不再进行介绍。

在初始化DMP时我们也设置一个超时检测,具体程序设计如下
u8 watCunt = 0; // 超时间检测计数变量
// 初始化DMP
printf ("DMP Init");
while(mpu_dmp_init())
{
printf (".");
delay_ms(200);
watCunt = watCunt + 1;
// 超时跳出
if (watCunt >= 150)
{
printf ("\r\n");
printf ("MPU6050 Connect Error!\r\n");
break;
}
}
printf ("\r\n");
printf ("DMP Init OK!\r\n");
3.4 获取三轴角度信息
最后我们在main函数中获取三轴角度,串口打印输出
int main(void)
{
float pitch,roll,yaw; // 欧拉角
Med_Mcu_Iint(); // 系统初始化
while(1)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw) == 0)
{
printf("Pitch:%.1f Roll:%.1f Yaw:%.1f\r\n",pitch,roll,yaw);
}
delay_ms(100);
}
}
四、实现效果
下面我们来看一下具体的效果
