Halcon的相机内参外参的标定
halcon标定相机内参只能使用方向标定板和圆点标定板。并且方向标定板可也可用性极高。
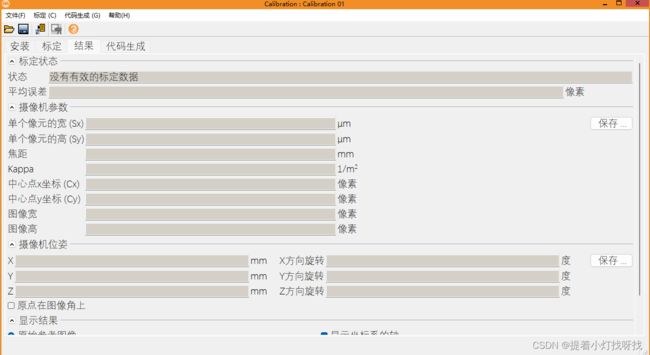
1.打开halcon的标定助手,选择标定板的描述文件,填写标定板的厚度,根据相机选择像元的尺寸和镜头的焦距。如果已有相机内参,只标定外参,可以选择用户自定义标定,添加标注相机内参数的文件后进行相机外餐的标定。

2.标定下拉栏中可以选择已拍摄的图像文件,或者通过图像采集助手实时获取图像,实时获取图像的过程中可以观察图像的质量及时做出调整,图像如果能够找到点位就可以用作标定。如果一张图像被设为参考位姿,相机的外参位置就是相对于这张图像中标定板的中心而言的。在去除完无效图像之后点击标定即可得到结果。

3.在结果中,平均误差的单位为像素,一般在0.1以下,在0.06左右较为正常。
标定已完成。下面是一些代码,感兴趣的可以看一下。
生成句柄,传入相机参数,传入标定板的配置文件。
读取图像中标定板的位姿,传入标定模型
gen_cam_par_area_scan_division (0.016, 0, 0.0000074, 0.0000074, 326, 247, 652, 494, StartCamPar)
create_calib_data ('calibration_object', 1, 1, CalibDataID)
set_calib_data_cam_param (CalibDataID, 0, [], StartCamPar)
set_calib_data_calib_object (CalibDataID, 0, 'caltab_30mm.descr')
NumImages := 10
* Note, we do not use the image from which the pose of the measurement plane can be derived
for I := 1 to NumImages by 1
read_image (Image, ImgPath + 'calib_' + I$'02d')
dev_display (Image)
find_calib_object (Image, CalibDataID, 0, 0, I, [], [])
get_calib_data_observ_contours (Caltab, CalibDataID, 'caltab', 0, 0, I)
dev_set_color ('green')
dev_display (Caltab)
endfor标定误差
calibrate_cameras (CalibDataID, Error)
get_calib_data (CalibDataID, 'camera', 0, 'params', CamParam)
* Write the internal camera parameters to a file
write_cam_par (CamParam, 'camera_parameters.dat')
Message := 'Interior camera parameters have'
Message[1] := 'been written to file'读取标定文件(相机内参)
try
read_cam_par ('camera_parameters.dat', CamParam)
catch (Exception)
* run 'camera_calibration_internal.hdev' first to generate camera
* parameter file 'camera_parameters.dat'
stop ()
endtry