队列与二值信号量、计数型信号量
一、队列简介:队列也称为消息队列,是一种用于消息间进行通信的数据结构,队列可以用于任务与任务之间、中断与任务之间传递消息,队列通常采用先进先出(FIFO)的数据缓冲机制。
二、队列常见的API函数
1.创建队列

2.写队列
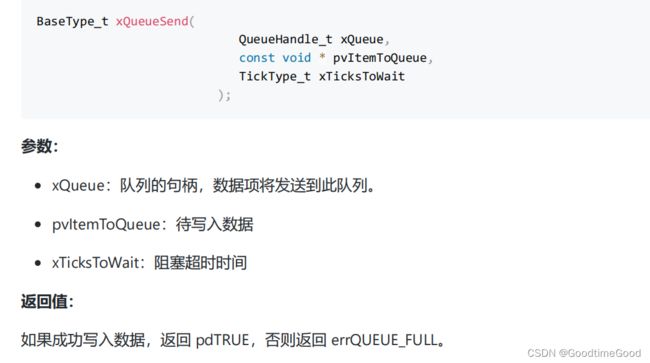
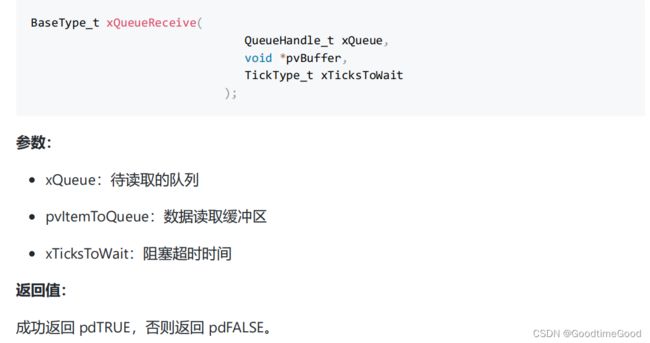
3.读队列
三、实验操作
需求:创建一个队列,按下KEY1向队列发送数据,按下KEY2向队列读取数据。
CubeMX配置信息:
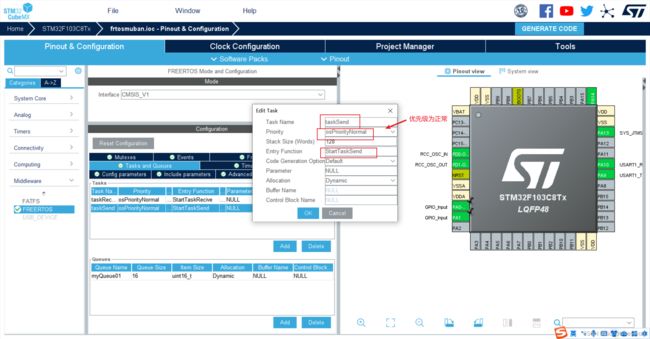

创建队列,CubeMX已经封装好了,和原始的函数有点差别:

StartTaskSend函数:
void StartTaskSend(void const * argument)
{
uint16_t buf = 100;
BaseType_t status;
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
{
status = xQueueSend(myQueue01Handle,&buf,0);
if(status == pdTRUE)
printf("写入队列成功,写入值%d\r\n",buf);
else
printf("写入队列失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET);
}
osDelay(1);
}
}StartTaskRecive函数:
void StartTaskRecive(void const * argument)
{
uint16_t buf ;
BaseType_t status;
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
{
status = xQueueReceive(myQueue01Handle,&buf,0);
if(status == pdTRUE)
printf("读取队列成功,读出值%d\r\n",buf);
else
printf("读取队列失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET);
}
osDelay(1);
}
}实验结果:通过按键1按三次,写入值三次;按按键2三次,读出值3次,按第四次读取失败。

二值信号量
一、信号量(Semaphore)
是在多任务环境下使用的一种机制,是可以用来保证两个或多个关键代码段不被并发调用。 信号量这个名字,我们可以把它拆分来看,信号可以起到通知信号的作用,然后我们的量还可以 用来表示资源的数量,当我们的量只有 0 和 1 的时候,它就可以被称作二值信号量,只有两个状 态,当我们的那个量没有限制的时候,它就可以被称作为计数型信号量。 信号量也是队列的一种。
二值信号量:二值信号量是一个长度为1,大小为0的队列,只有0和1两种状态,通常情况下,用来就行互斥访问或任务同步。互斥访问:比如获取了门钥匙,只有获取了钥匙才能开门。
二、二值信号量相关API函数




三、二值信号量实验
需求:创建一个二值信号量,按下KEY1释放信号量,按下KEY2获取信号量
1.cubeMX配置:释放(give)和获取(get)二值信号量,生成代码


注意: cubeMX生成的myBinaryHanle需要注释掉,使用xSemaphoreCreateBinary();

2.释放二值信号量和获取二值信号量
void StartTaskGive(void const * argument)
{
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
{
if(xSemaphoreGive(myBinaryHandle) == pdTRUE)
printf("二值信号量放入成功\r\n");
else
printf("二值信号量放入失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET);
}
osDelay(1);
}
}void StartTaskTake(void const * argument)
{
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
{
if(xSemaphoreTake(myBinaryHandle,portMAX_DELAY) == pdTRUE)//portMAX_DELAY表示卡死等待,0表示不超时
printf("二值信号量获取成功\r\n");
else
printf("二值信号量获取失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET);
}
osDelay(10);
}
}实验结果:当为portMAX_DELAY(死等),可以先点击获取信号量在放入

BaseType_t xSemaphoreTake( SemaphoreHandle_t xSemaphore, TickType_t xTicksToWait );
当TickType_t xTicksToWait=0时,必须放一次信号量,拿一次信号量。

计数型信号量
一:定义:
计数型信号量相当于队列长度大于 1 的队列,因此计数型信号量能够容纳多个资源,这在计数型
信号量被创建的时候确定的。
二、相关API函数

配置cubeMX,需要将USE_COUNTING_SEMAPHORES打开成Enable,注释掉cubeMX生成的创建信号量函数,改用xSemaphoreCreateCounting()。


三、代码
void StartTaskGive(void const * argument)
{
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
{
if(xSemaphoreGive(CountingSem01Handle) == pdTRUE)
printf("计数型信号量放入成功\r\n");
else
printf("计数型信号量放入失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET);
}
osDelay(1);
}
void StartTaskTake(void const * argument)
{
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
{
if(xSemaphoreTake(CountingSem01Handle,0) == pdTRUE)
printf("计数型信号量获取成功\r\n");
else
printf("计数型信号量获取失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET);
}
osDelay(10);
}
实验结果:
