基于STM32用uC/OS实现LED周期亮和数据发送
目录
- 一、RTOS的简介
-
-
- 1.嵌入式系统的层次结构
- 2.RTOS实时操作系统
- 3.软实时和硬实时
- 4.RTOS 的特征
- 5.uc/OS-II中的数据类型
- 6.RTOS系统的运行状态
- 7.任务的种类
-
- 二、环境的配置(HEL库的生成)
- 三、代码的编译
- 四、下载uCOSIII源码
- 五、文件的移植
- 六、准备移植和修改代码
- 七、程序的运行
- 八、总结
- 参考文献
一、RTOS的简介
1.嵌入式系统的层次结构
2.RTOS实时操作系统
RTOS实时操作系统,又称及时操作系统。
实时操作系统,是指当外界事件或数据产生时,能够接受并以足够快的速度予以处理,其处理的结果又能在规定的时间之内来控制生产过程或对处理系统做出快速响应,调度一切可利用的资源完成实时任务,并控制所有实时任务协调一致运行的操作系统。
而uC/OS是一个可以基于ROM运行的、可裁减的、抢占式、实时多任务内核,具有高度可移植性,特别适合于微处理器和控制器,适合很多商业操作系统性能相当的实时操作系统(RTOS)。
3.软实时和硬实时
实时操作系统又可以分为软实时和硬实时。
软实时
软实时只要按照任务的优先级,尽可能快地完成操作即可。电脑的输入处理可以算作是一种“软实时”。为了保证用户的最佳体验,计算机对每个输入的响应应当在一个恰当的时间范围;但如果响应超出了这个时间范围,只是稍有卡顿。
硬实时
在操作系统设计中严格保证完成即在规定的时间内必须完成操作,如果无法做到则意味着整个系统的失败。
4.RTOS 的特征
① 高精度计时
系统计时精度是影响实时性的一个重要因素。在实时应用系统中,经常需要精确确定实时地操作某个设备或执行某个任务,或精确的计算一个时间函数。这些不仅依赖于一些硬件提供的时钟精度,也依赖于实时操作系统实现的高精度计时功能。
② 多级中断机制
一个实时应用系统通常需要处理多种外部信息或事件,但处理的紧迫程度有轻重缓急之分。有的必须立即作出反应,有的则可以延后处理。因此,需要建立多级中断嵌套处理机制,以确保对紧迫程度较高的实时事件进行及时响应和处理。
③ 实时调度机制
实时操作系统不仅要及时响应实时事件中断,同时也要及时调度运行实时任务。但是,处理机调度并不能随心所欲的进行,因为涉及到两个进程之间的切换,只能在确保“安全切换”的时间点上进行,实时调度机制包括两个方面,一是在调度策略和算法上保证优先调度实时任务;二是建立更多“安全切换”时间点,保证及时调度实时任务。
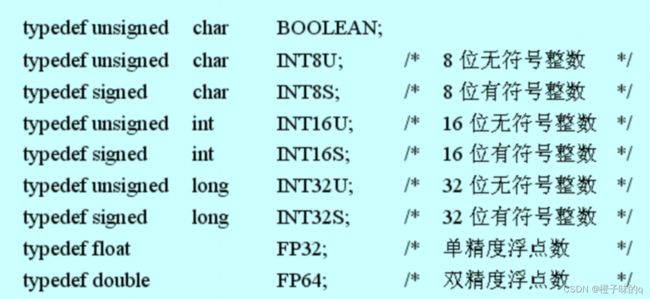
5.uc/OS-II中的数据类型
6.RTOS系统的运行状态
(1)睡眠态:刚刚创建的任务是处于睡眠的状态的。
(2)就绪状态:如果系统为任务配备了任务控制块并且在任务的就绪表中进行了就绪登记的话,则任务就具备了运行的充分条件,这时候任务的状态就叫做就绪态。
(3)运行状态:处于就绪状态的任务如果经过UCOSII的位图机制,判断为处于最高优先级的任务的话,那么它就可以获得CPU的使用权,这时候就是运行状态。
(4)中断服务状态:无论处在那种状态都有可能转化至中断态。
(5)等待状态:在此状态下,可以通过裁剪UCOSII内核去掉的,其实这个状态就是为了满足任务之间的通讯和任务与中断服务子程序通信产生的一种状态。
7.任务的种类
UC/OS有两种任务:用户任务和系统任务。有应用程序设计者编写的任务叫做用户任务,由系统提供的任务叫做系统任务,UC/OS-2中,最多可以含有64个任务(包含用户任务和系统任务)。操作系统有两个系统任务,空闲任务和统计任务,其中空闲任务是每个应用程序必须要使用的,而统计任务则是可以根据实际需要选择使用。统计任务每秒计算一次CPU在单位时间内被使用的时间,并把计算结果以百分比的形式存放在变量OSCPUsage中,以便其他应用程序来了解CPU的使用率。
二、环境的配置(HEL库的生成)
RCC的配置

SYS的配置
设置PC13为GPIO_Output
 串口USART1的设置
串口USART1的设置
建立工程


GENERATE CODE,创建工程
三、代码的编译
在main函数中的while循环中
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET);
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_Delay(500);
}
/* USER CODE END 3 */
编译成功 将代码烧录到STM32F103中,BOOT0置零,按下Reset按钮,可以看到PC13LED灯闪烁,证明代码没有问题
将代码烧录到STM32F103中,BOOT0置零,按下Reset按钮,可以看到PC13LED灯闪烁,证明代码没有问题
四、下载uCOSIII源码
链接:https://pan.baidu.com/s/10RqsDRecbmVteWmDv2oUNQ
提取码:1234

五、文件的移植
给uC-BSP文件夹新建bsp.c和bsp.h文件,给文件夹uC-CONFIG添加以下文件(从以下路径复制过来)

把uCOS相关文件复制到HAL工程的MDK-ARM中


六、准备移植和修改代码
点击Manage Project Items

在项目下新建文件:

uC-CPU中文件,CPU–>Add Files…Add
 uC-LIB中文件,LIB–>Add Files…Add
uC-LIB中文件,LIB–>Add Files…Add


点击uCOS-III

点击Source-os的其他文件-Add

uC-CONFIG–app_cfg…–Add

选中uC-BSP的bsp–Add

逐个添加–ok

可以看到文件的列表,产生项目变化
选择魔法棒Options for Target ‘ucos’

添加路径

在路径下寻找文件

在bsp.c和bsp.h中,添加代码

在bsp.h中添加
// bsp.h
#ifndef __BSP_H__
#define __BSP_H__
#include "stm32f1xx_hal.h"
void BSP_Init(void);
#endif

在bsp.c中添加代码
// bsp.c
#include "includes.h"
#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
CPU_INT32U BSP_CPU_ClkFreq (void)
{
return HAL_RCC_GetHCLKFreq();
}
void BSP_Tick_Init(void)
{
CPU_INT32U cpu_clk_freq;
CPU_INT32U cnts;
cpu_clk_freq = BSP_CPU_ClkFreq();
#if(OS_VERSION>=3000u)
cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;
#else
cnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;
#endif
OS_CPU_SysTickInit(cnts);
}
void BSP_Init(void)
{
BSP_Tick_Init();
MX_GPIO_Init();
}
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{
CPU_INT32U cpu_clk_freq_hz;
DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */
DWT_CYCCNT = (CPU_INT32U)0u;
DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;
cpu_clk_freq_hz = BSP_CPU_ClkFreq();
CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{
return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif
#if (CPU_CFG_TS_32_EN == DEF_ENABLED)
CPU_INT64U CPU_TS32_to_uSec (CPU_TS32 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
#if (CPU_CFG_TS_64_EN == DEF_ENABLED)
CPU_INT64U CPU_TS64_to_uSec (CPU_TS64 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif

修改main.c中更改代码
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "usart.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include 添加后,如图

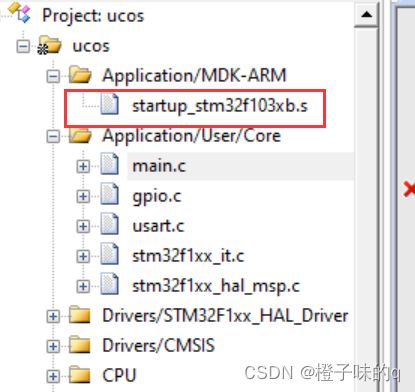
选择startup_stm32f103xb.s
找到PendSV_Handler,SysTick_Handler

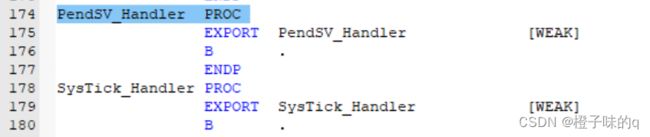 修改为OS_CPU_PendSVHandler和OS_CPU_SysTickHandler
修改为OS_CPU_PendSVHandler和OS_CPU_SysTickHandler


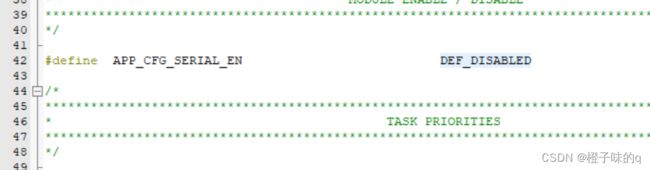
找到app_cfg.h

找到DEF_ENABLED
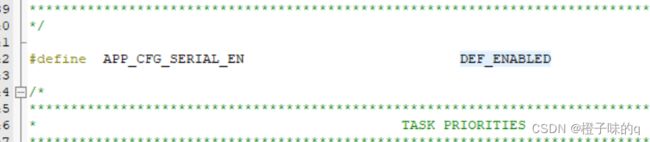
修改为DEF_DISABLED
找到APP_TRACE

修改为APP_TRACE(void)

找到includes.h

在#include
#include “gpio.h”
#include “app_cfg.h”

将#include

将#include
![]()
找到lib_cfg.h

修改参数

修改重定向
/* USER CODE BEGIN 1 */
int fputc(int ch,FILE *f){
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xffff);
return ch;
}
/* USER CODE END 1 */
如图所示

看到这里出错了,添加头文件#include

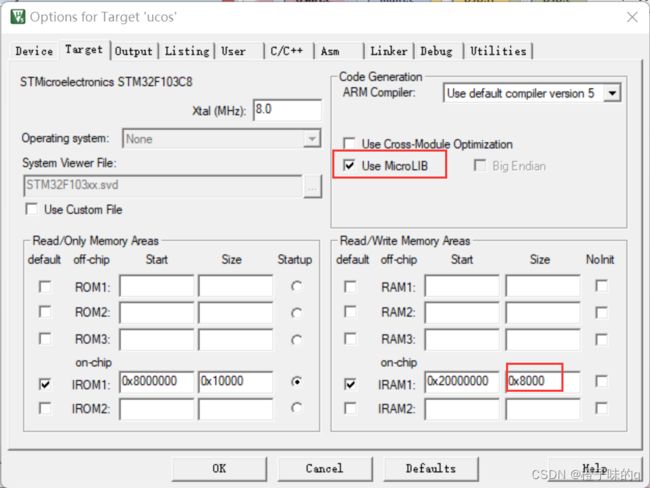
选择Options for Target ‘ucos’

选择Use MicroLIB(使用微库),选择参数0x8000
选择Output–Create HEX File(生成HEX文件)
修改参数Dialog DLL–Parameter和Parameter

编译0 errors,进行烧录
七、程序的运行
移植uCOS基于HAL库
收hello uc OS
八、总结
通过本次实践,了解了UC/OS的基本知识,实现了LED灯的周期闪烁以及串口发送数据的过程,本篇内容较为简单,整体跟着步骤实操一遍很容易实现,但本文实操内容较为繁琐,稍有不慎就会移植文件缺失,我在操作过程中少添加了部分文件一直报错,所以一定要细心细心再细心!!看到这里了,希望对你有所帮助。
参考文献
RTOS相关概念
从零开始学习UCOSII操作系统15–总结篇
uc/OS基本概念及认识(从零到负,打通你的任督二脉)
UC/OS基础知识之任务