【转】机器视觉 之 三个坐标系转换
转自:https://www.cnblogs.com/xinxue/p/7597897.html
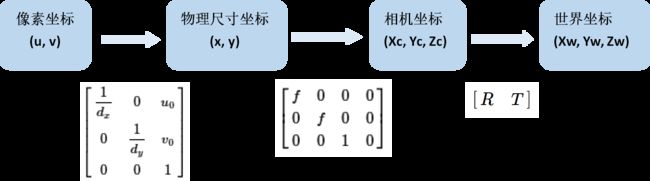
计算机视觉中,常用的有三个坐标系:图像坐标系、相机坐标系和世界坐标系。
它们之间的关系,可以通过三个变换来表示:仿射变换,投影变换,刚体变换。这三个变换是三维重构几何框架的基础。
如下所示,通过这三个变换,可将三维空间中的点坐标 (Xw, Yw, Zw),与二维图像中的像素坐标 (u, v) 对应起来。
1 图像坐标系
图像坐标系,是在像平面内,以二维图像为基准所建立的坐标系。根据单位的不同,可分为 像素坐标 (单位 = 像素个数) 和 物理尺寸坐标 (单位 = mm)
1.1 分类
像素坐标 (u, v) 中,原点 为图像左上角点,坐标轴 为 u 轴 和 v 轴,表示物体所在的行数和列数
物理尺寸坐标 (x, y) 中,原点 为图像的主点,也即光轴与像平面的交点,坐标轴 为 x 轴 (平行 u 轴) 和 y 轴 (平行 v 轴),表示物体的尺寸大小

1.2 仿射变换
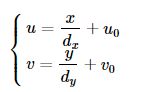
当相机调整好焦距后,相机透镜中心点到像平面的距离是固定的,此时,像平面内每个像素的尺寸大小也变成了固定值。
假设每个像素在 x 轴和 y 轴 方向上的物理尺寸分别为 dx 和 dy,则在忽略相机成像畸变的情况下,像素坐标和物理尺寸坐标的转换关系如下:
两者的齐次坐标转换关系为:
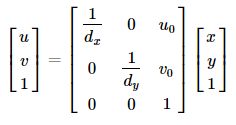
这样,就建立了图像中,像素坐标和物理尺寸坐标之间的对应关系。
2 相机坐标系
相机坐标系 (Xc,Yc,Zc)(Xc,Yc,Zc)中,原点 为相机透镜的中心,坐标轴 Xc 轴与 x 轴平行,Yc 轴与 y 轴平行,Zc 轴与相机光轴重合
2.1 小孔成像
相机是三维物体和所成二维图像之间的一种映射,常用的小孔成像模型,如下图所示:

2.2 投影变换
设相机的焦距为 f,则根据小孔成像模型,可知相机坐标系下空间点 (Xc,Yc,Zc)(Xc,Yc,Zc),与物理尺寸坐标 (x,y)(x,y) 的关系如下:

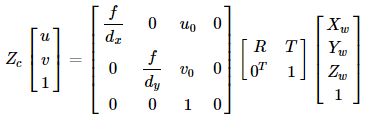
像素坐标 (u,v)(u,v) 与相机坐标点 (Xc,Yc,Zc)(Xc,Yc,Zc) 的关系为:

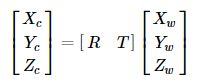
3 世界坐标系
世界坐标系,是实际物体位置的参考系,它和 相机坐标系 的转换关系,就是一个刚体变换,具体见 立体视觉 之 刚体变换
这样,就建立了图像中的 像素点 (u, v) 和 世界坐标中的 空间点 (Xw, Yw, Zw) 之间的对应关系。
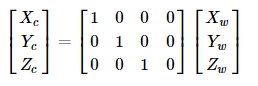
世界坐标系,可根据运算的方便,来自由放置。若世界坐标系和相机坐标系重合,则 RR 为单位矩阵,TT 为零矩阵,即:
小结
这样,像素点 (u, v), 通过相机内参 A,转换为相机坐标下的 (Xc, Yc, Zc),再经过 RTRT 变换,便可得到世界坐标下的 (Xw, Yw, Zw)
后记
实际上,这有两个问题:第一,上式中的 ZcZc 未知;第二,一个像素坐标点 (u,v),虽能转化为空间点坐标 (Xw, Yw, Zw),但并没有 成像物体的特征点 与其对应
这里有两种解决思路:一种是 双目视觉,另一种是 结构光
参考资料
<视觉测量> 张广军,第2章,第 7章
转自 https://www.cnblogs.com/xinxue/p/7597897.html