机器人三级实操题操作基础技巧汇总
-
第一类:开关类:
一般使用选择模块来判断,如果后面条件成立(除了0以外的数在被当作条件时都会被视为1),那么就执行,参考下面的程序也就是当数字引脚2为高电平时为1时候成立,数字3拉高点平(这里注意选择题中按钮是上拉输入还是输入状态)。

但是一般这样使用时,必须要长按,才会执行,所以开关类分为即时类开关和持久类开关:
- 即时类:也就是上面图片的用法仅仅使用一个如果的选择结构。
- 持久类:操作方法:会定义一个变量来当做状态指示位,具体指示例 如灯的亮灭状态,或者在红外中应用例如按下1键,开启什么功能 之类的操作。也即是将输入与输出之间加一个变量来实现持久化。

3.用上面的按键灯举例:操作分为两部分一部分是输入,另一部分来判断。也即是灯的亮灭是通过布尔形的item这个变量的值来判断的,当按一次那么假设原来的item的值为0对应着灯的状态为灭,按一次后,item的值就会取反,变成1,也就是利用如果,就是对应着亮。
注意:只有变量的声明是默认放在初始化的,其他模块默认是放在循环里的。
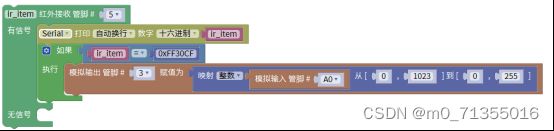
通过上面的例子,我们再举一个例子来看看能用在什么地方,例如在涉及红外的考题中我们常常会遇到一个操作,就是按下一个键,开启什么功能,这里我们利用按下1键位,能够开启利用电位器来操控灯的亮度的功能为例:

这里我们进行的操作就是持久类的操作,这时候我们先按下1键,那么控制我们灯的亮度的就是电位器,仔细想想红外的 操作,当我们按下一个键时,ir_item这个变量就会赋值为当前接收到的键位值,也就是假设我们按下了1键,那么电位器控制灯的功能就打开了,也就是即使我们按下其他键,ir_item变量中的值改变以后,因为我们定义了一个i变量作为电位器控制功能开启与否的标志,他也仍旧开启,也就是看看下面的程序和上面的区别:
这个程序就是不使用持久化的操作,当你按下1键,ir_item这个变量中存储的值为1建,这时候当然开启了电位器的功能,但是假如我们按下2键,那么变量的值改变了以后就不满足也就不开启。
这两个程序的区别就是,第一个程序能按下1键开启,直到再次按下1键关闭,按下其他键为则正常开启。而下面这个则是按一下开启,但是当你按下其他时,则自动关闭。
-
第二类:映射类
映射基本上每个程序都会考,不仅仅是我们选择题类的重点,也是我们实操题的重点,是重中之中,那我们这里最最主要就是讲清楚为什么要用映射,怎么用映射:
- 应用在灯的亮度:灯作为一个集数字与模拟两种的状态的灯,作为数字时,给1就是最亮,给0就是最暗。作为模拟时候,我们根据亮度将其分为256个状态,但是由于排列时是从0开始的,所以我们将其范围列为:0~255。也就是256个状态,当然我们可能赋值为257,那这是什么状态呢,也就是先减去255,等于2,那么剩下来的2再拿来对应256,也就是第二位,比最暗亮一度,那么756呢?756-255=501,501-256=245,所以就对应着256位的245位,差11个状态就是最亮。言归正传,灯的亮度变化准确分为两种,一种是自动,一种是被动:
- 自动变亮:那么就是用不上映射,直接用for循环,即可实现自动从最暗到最亮,那么最亮到最暗也是同理。

根据电位器被动改变
![]()
这里是因为模拟输入电位器的范围为:0~1023,灯的亮度模拟输出范围为:0~255假如我们直接使用下图操作,那么明显范围不同,电位器旋转180°会导致灯亮灭四次,所以我们使用上图,利用映射,将电位器的范围映射到灯的亮度范围,也就是一一对应以后,也就是成功。

这里也可以配合超声波,比如距离越近灯越亮,越近,距离越小,反而亮度越亮,也就是意味着要反过来映射:
![]()
- 同理应用在舵机上:
例如要使用电位器控制舵机旋转的角度,因为电位器的范围是:0~1023,180度舵的范围是:0~180,要是要实现电位器从0到1023,实现舵机的从0到180,所以也需要用映射,才能实现刚刚好对应:

也就是通过上面这些例子我们能大概了解使用映射是为了实现数据的一一对应,所以映射会应用在控制类的操作,例如:超声波距离指示灯,电位器控制灯,电位器控制舵机,等等。
-
第三类:舵机
舵机又是常考考点,包括选择填空,所以我们总结舵机的操作,实际上分为两种,一种是重点在于精准角度,一种是只需要提供转动的功能的,
-
精准角度
也就是我们必须细分每个角度,例子:超声波检测器:舵机一直转动,当在某一角度检测到物体靠近时,停在该角度,远离时,继续转动,也就是我们需要停在某一角度,并且需要从该角度继续转动:

使用for循环就能实现,舵机自动转动,并且角度固定,这里只需要将步长改变更小,那角度更加精确,这里有两个需要的点:
- 延时:舵机的延时包括了舵机在这个角度转向另一个角度时所需要时间以及在该角度停留所耗费的时间,舵机转动的速度是固定的,所以当你将延时设置太小而转动的角度又过大时,可能就不会实现想要的实验效果具体卡看下图所示:


上面俩程序实现效果就很不一样,可以试试。
-
- 重复满足:这个是while循环,是一个妙用,看上方程序,我们要实现的效果是当距离小于15时,舵机不动,而我们的舵机是随着for循环实现转动的,当我们使用这个‘重复满足’这个模块时,我们就能将程序卡在这个循环里面,也就是一直停在当前角度不动,当距离大于15时,才跳出循环,然后for循环当前循环结束才会开始下一轮。
- 只需转动功能:

例如题目只需要你按下按键然后将舵机从0~180转动,再次按下按键舵机停止到0度,那么直接使用如下图所示就行。
注意: 当使用到了灯、舵机、蜂鸣器时,我们一定要初始化。