【Matlab】数据插值
数据插值
插值与拟合的区别:
- 实现方法:插值要求曲线穿过样本点,而拟合不需要穿过样本点,只要求总体误差最小。
- 结果形式:插值是分段逼近样本点,没有同一的逼近函数;函数拟合则用一个函数去逼近,有完整的表达式。
- 侧重点:插值可以用于估计区间内某些点对应的函数值;拟合不仅可以估计区间内的点,也可以预测区间外的点。
- 应用场合:插值多用于精确数据集;拟合多用于统计数据集。
数据插值的作用:在给定的若干数据中,模拟出一条曲线贯穿这些已知数据,我们便可以根据曲线得到未知点的数据信息。
interp1函数
Y1=interp1(X,Y,X1,method):一维插值函数。根据X、Y的值,计算函数在X1处的值。其中,X、Y是两个等长的已知向量,分别表示采样点和采样值。X1是一个向量或标量,表示要插值的点。
method为字符串,可选值有:
- linear,默认,线性插值,折线状。
- nearest,最近插值,阶梯状。
- pchip,分段三次多项式插值,满足在若干节点处相邻段插值函数的一阶导数相等,比较光滑。
- spline,三次样条插值,分段构造三次多项式,满足在各个节点处具有连续的一阶和二阶导数,非常光滑。
为什么’pchip’和’spline’这两种插值方法都用3次多项式而不用更高次的?
多项式次数并非越高越好。次数越高,越容易产生震荡而偏离原函数,这种现象称为龙格(Runge )现象。
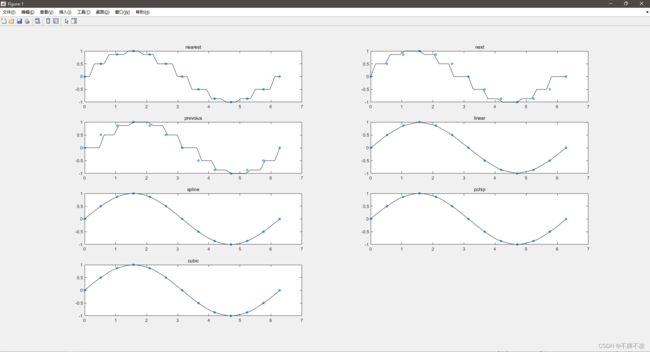
%% 全部的插值方式
xdata=0:pi/6:2*pi;
ydata=sin(xdata);
x=0:pi/20:2*pi;
subplot(4,2,1)
y=interp1(xdata,ydata,x,'nearest');
plot(xdata,ydata,'p',x,y,'k-')
title('nearest')
subplot(4,2,2)
y=interp1(xdata,ydata,x,'next');
plot(xdata,ydata,'p',x,y,'k-')
title('next')
subplot(4,2,3)
y=interp1(xdata,ydata,x,'prevoius');
plot(xdata,ydata,'p',x,y,'k-')
title('prevoius')
subplot(4,2,4)
y=interp1(xdata,ydata,x,'linear');
plot(xdata,ydata,'p',x,y,'k-')
title('linear')
subplot(4,2,5)
y=interp1(xdata,ydata,x,'spline');
plot(xdata,ydata,'p',x,y,'k-')
title('spline')
subplot(4,2,6)
y=interp1(xdata,ydata,x,'pchip');
plot(xdata,ydata,'p',x,y,'k-')
title('pchip')
subplot(4,2,7)
y=interp1(xdata,ydata,x,'cubic');
plot(xdata,ydata,'p',x,y,'k-')
title('cubic')
补充:牛顿插值代码:(不知道应用场景)
function s=newtoninterp(xdata,ydata,x) % xdata和ydata为已知点数据,x为要求点数据
%Newton interpolation at notes (xdata,ydata)
n=length(xdata);
s=ydata(1);xx=1;
for k=2:n
xx=xx.*(x-xdata(k-1));
for l=k:n
ydata(l)=(ydata(l)-ydata(k-1))/(xdata(l)-xdata(k-1));
end
s=s+xx*ydata(k);
end
end
其他用法以及类似其他函数参考
interp2函数
interp2(x, y, z, x1, y1, method):二维插值。x、y可为网格数据也可为向量,z为网格数据对应的z坐标,x1、y1为要求数据点信息。
应用
机动车刹车距离问题
在车辆行驶中,从驾驶员看到障碍物开始,到作出判断而采取制动措施停车所需的最短距离叫停车视距。停车视距由三部分组成:一是驾驶员反应时间内行驶的距离(即反应距离);二是开始制动到车辆完全停止所行驶的距离(即制动距离);三是车辆停止时与障碍物应该保持的安全距离。其中,制动距离主要与行驶速度和路面类型有关。根据测试,某型车辆在潮湿天气于沥青路面行驶时,其行车速度(单位: km/h)与制动距离(单位:m)的关系如下表所示。
| 速度 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 | 120 | 130 | 140 | 150 |
| 制动距离 | 3.15 | 7.08 | 12.59 | 19.68 | 28.34 | 38.57 | 50.4 | 63.75 | 78.71 | 95.22 | 113.29 | 132.93 | 154.12 | 176.87 |
假设驾驶员的反应时间为10s,安全距离为10m。请问:
①根据某驾驶员的实际视力和视觉习惯,其驾驶时的有效视距为120m,则其在该路面行车时,时速最高不能超过多少(结果取整)?
②若以表中数据为参考,设计一条最高时速为125km/h的高速公路,则设计人员应该保证驾驶者在公路上任一点的可视距离为多少米?
设速度为 v v v,停车视距为 d d d,反应距离为 d 1 d_1 d1,制动距离为 d 2 d_2 d2,安全距离为 d 3 d_3 d3,反应时间为 a s a_s as,则
d = d 1 + d 2 + d 3 d=d_1+d_2+d_3 d=d1+d2+d3
其中, d 1 = a s v d_1=a_sv d1=asv, d 2 d_2 d2为 v v v的函数, d 3 d_3 d3已知。
第一问:根据某驾驶员的实际视力和视觉习惯,其驾驶时的有效视距(即最大距离)120m,则其在该路面行车时,时速最高不能超过多少(结果取整)?
已知反应时间为10s,安全距离为10m,可采用解方程方法:
10 v + d 2 + 10 = 120 10v+d_2+10=120 10v+d2+10=120
存在的问题是, d 2 d_2 d2是 v v v的函数,但是函数关系未知,方程不可解。
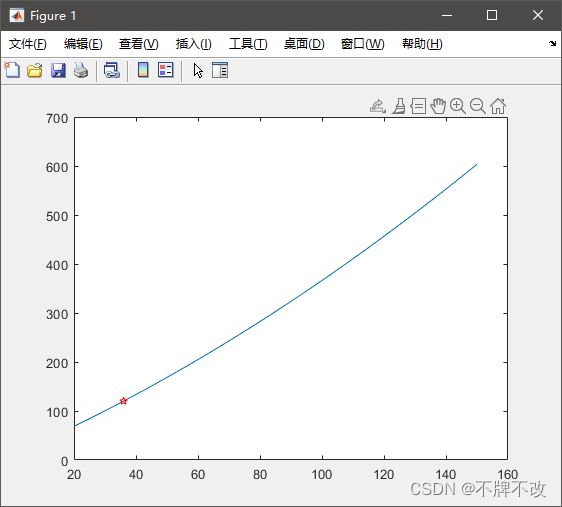
下面考虑数据插值方法,以表格中的数据为样本,进行数据插值,计算出120m的停车视距所对应的速度指标。
编程思路:
第一步:建立速度和停车视距向量。
第二步:以1为单位,对采样区间内所有速度进行插值,计算出相应的停车视距。
第三步:求出停车视距120所对应的速度。
第四步:绘图展示。
如何根据停车视距120找到对应的速度?
第一步:令代表停车视距的向量 d i d_i di减去120,再取绝对值,得到一个新的向量x。
第二步:将x按升序排列,并记录最小元素的序号,该序号即为停车视距120所对应的速度数据在向量 v i v_i vi中的序号。
第三步:根据序号取得速度数据。
v=20:10:150;
vs=v*(1000/3600); % 单位换算 km/s m/s
d1=10*vs;
d2=[3.15,7.08,12.59,19.68,28.34,38.57,50.4,63.75,78.71,95.22,113.29,132.93,154.12,176.87];
d3=10;
d=d1+d2+d3;
vi=20:150;
di=interp1(v,d,vi,'spline'); % 插值
%% 下面是选出等于120对应的横坐标的方法,方法不唯一!
%% 选出和120差值最小的数对应的横坐标
x=abs(di-120);
[y i]=sort(x);
vi(i(1)) % 第一个就是最小的 % 36
plot(vi,di,vi(i(1)),di(i(1)),'rp') % 满足要求的点
第二问:设计一条最高时速为125km/h的高速公路,则设计人员应该保证驾驶者在公路上任一点的可视距离为多少米?
j=find(vi==125); % 找到最高时速为125对应的距离所在索引
di(j)
plot(vi,di,125,di(j),'rp')

沙盘制作问题
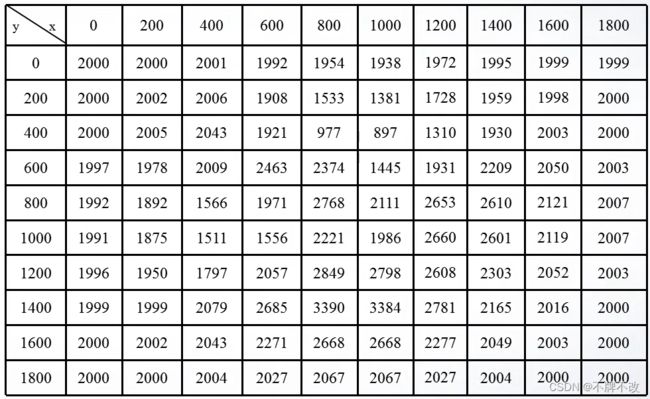
某地面部队分成红蓝两方在指定的陌生区域(平面区域[0,2000]×[0,2000]内,单位:m)进行作战演习。在演习过程中,红方侦查单位已经测得一些地点的高程如下表所示。
①根据表中数据,制作军事沙盘。
②在演习范围内,占领最大高地的一方将获得居高临下的优势。请问红方应第一时间抢占哪块区域。
解题思路:
第一问:用二维插值估算数据,以方便制作军事沙盘。
第二问:在插值的基础上,绘制等高线图,找到最大高地。
x=0:200:1800;
y=x;
z = [2000,2000,2001,1992,1954,1938,1972,1995,1999,1999;
2000,2002,2006,1908,1533,1381,1728,1959,1998,2000;
2000,2005,2043,1921, 977, 897,1310,1930,2003,2000;
1997,1978,2009,2463,2374,1445,1931,2209,2050,2003;
1992,1892,1566,1971,2768,2111,2653,2610,2121,2007;
1991,1875,1511,1556,2221,1986,2660,2601,2119,2007;
1996,1950,1797,2057,2849,2798,2608,2303,2052,2003;
1999,1999,2079,2685,3390,3384,2781,2165,2016,2000;
2000,2002,2043,2271,2668,2668,2277,2049,2003,2000;
2000,2000,2004,2027,2067,2067,2027,2004,2000,2000];
surf(x,y,z);
colormap(mycolor)
%% 插值后
x1=0:100:1800; % 以100为间隔
y1=x1';
z1=interp2(x,y,z,x1,y1,'spline');
figure(2)
surf(x1,y1,z1);
colormap(mycolor)
x1=0:50:1800; % 以50为间隔
y1=x1';
z1=interp2(x,y,z,x1,y1,'spline');
figure(3)
surf(x1,y1,z1);
colormap(mycolor)
%% 绘制等高线
figure(4)
[c h] = contourf(x1, y1, z1, 10)
clabel(c, h) % 显示等高线表示的高度
colorbar % 显示高度配色表
colormap(mycolor)
%% 以下仅为我喜欢的配色图而已
mycolorpoint=[[0 0 16];
[8 69 99];
[57 174 156];
[198 243 99];
[222 251 123];
[239 255 190]];
mycolorposition=[1 11 33 50 57 64];
mycolormap_r=interp1(mycolorposition,mycolorpoint(:,1),1:64,'linear','extrap');
mycolormap_g=interp1(mycolorposition,mycolorpoint(:,2),1:64,'linear','extrap');
mycolormap_b=interp1(mycolorposition,mycolorpoint(:,3),1:64,'linear','extrap');
mycolor=[mycolormap_r',mycolormap_g',mycolormap_b']/255;
mycolor=round(mycolor*10^4)/10^4;%保留4位小数




contour函数和contourf函数讲解
这里只讲解基础用法:
[c,h] = contourf(X,Y,Z,t); X、Y为网格数据或向量(与mesh中的参数用法一致),Z是函数值,t为等高线之间的间距和等高线标注的范围(可理解为越大等高线越密集);返回值不知道含义。
clabel(c, h) :标注等高线的高度(虽然不知道返回值含义,但可以直接使用)。
colorbar:配色标注。
contour函数与contourf函数用法一致,只是contour显示的是线条,线条间没有颜色填充;而contourf线条间有颜色填充。
figure('NumberTitle', 'off', 'Name', 'contourf'); % 修改图窗名称
contourf(x1, y1, z1, 10)
title('contourf')
colormap(mycolor)
figure('NumberTitle', 'off', 'Name', 'contour');
contour(x1, y1, z1, 10)
title('contour')
colormap(mycolor)

