光谱图像常见评价指标
光谱图像常见评价指标
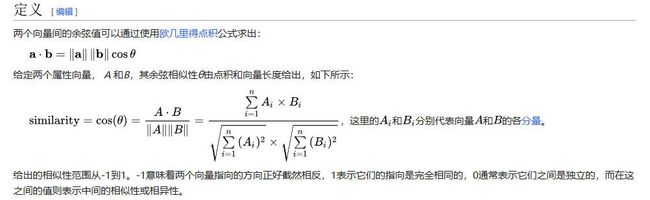
SAM(Spectral Angle Mapper)
SAM算法是由Kruse等[146]在1993年提出,把图像中的每个像元的光谱视为一个高维向量,通过计算两向量间的夹角来度量光谱间的相似性,夹角越小,两光谱越相似,属于同类地物的可能性越大,因而可根据光谱角的大小来辨别未知数据的类别。分类时,通过计算未知数据与已知数据间的光谱角,并把未知数据的类别归为最小光谱角对应的类别中。
S A M = c o s − 1 ( Y T X ∣ ∣ Y ∣ ∣ ∣ ∣ X ∣ ∣ ) SAM=cos^{-1}(\frac{Y^TX}{||Y||\quad||X||}) SAM=cos−1(∣∣Y∣∣∣∣X∣∣YTX)
其中 Y 是给定的目标向量,X 是要测量的向量。
# Loss_SAM 类定义了结构相似性(SAM)的损失函数。
# forward 方法接受两个输入图像(im1 和 im2)作为输入。
# 函数首先确保两个图像具有相同的形状,然后进行一系列操作以计算结构相似性(SAM)。
# 结构相似性度量被计算为两个输入图像之间的平均值,并作为输出返回。
# 请注意,此实现中使用了 NumPy 而不是 PyTorch 张量,您可能需要将其转换为 PyTorch 操作以使其适用于深度学习模型的训练。
class Loss_SAM(nn.Module):
def __init__(self):
super(Loss_SAM, self).__init__()
#一个正则项,添加到分母和分子中,以防止除以零或对接近 1 的值取反余弦函数。
self.eps = 2.2204e-16
def forward(self, im1, im2):
assert im1.shape == im2.shape
H, W, C = im1.shape
im1 = np.reshape(im1, (H * W, C))
im2 = np.reshape(im2, (H * W, C))
core = np.multiply(im1, im2)
mole = np.sum(core, axis=1)
im1_norm = np.sqrt(np.sum(np.square(im1), axis=1))
im2_norm = np.sqrt(np.sum(np.square(im2), axis=1))
deno = np.multiply(im1_norm, im2_norm)
sam = np.rad2deg(np.arccos(((mole + self.eps) / (deno + self.eps)).clip(-1, 1)))
return np.mean(sam)
-
对于 x i T x ∗ x_i^Tx^* xiTx∗,相当于对这两个向量进行点积然后再进行求和。
den=np.sum(np.dot(im1,im2)) -
内积为向量与转置的乘积。
im1_norm = np.sqrt(np.sum(np.square(im1), axis=1)) im2_norm = np.sqrt(np.sum(np.square(im2), axis=1)) deno = np.multiply(im1_norm, im2_norm)
RMSE——Root Mean Square Error

# Loss_RMSE 类定义了均方根误差(RMSE)的损失函数。
# forward 方法接受输出(outputs)和标签(label)作为输入。
# 函数首先确保输出和标签具有相同的形状,然后计算它们之间的均方根误差(RMSE)。
class Loss_RMSE(nn.Module):
def __init__(self):
super(Loss_RMSE, self).__init__()
def forward(self, outputs, label):
assert outputs.shape == label.shape
error = outputs.clamp(0., 1.) * 255 - label.clamp(0., 1.) * 255
sqrt_error = torch.pow(error, 2)
rmse = torch.sqrt(torch.mean(sqrt_error.contiguous().view(-1)))
return rmse
-
outputs.clamp(0., 1.) * 255 - label.clamp(0., 1.) * 255将数值映射到(0-1),并放到到255,因为图像中的像素值通常是0-255的数值 -
∑ i = 1 n ( Y i − f ( x i ) ) 2 \sum_{i=1}^{n}\left(Y_{i}-f\left(x_{i}\right)\right)^{2} ∑i=1n(Yi−f(xi))2对平方误差进行求平均值,
其中
.contiguous(): 这是一个方法调用,通常用于确保张量在内存中的布局是连续的。在某些情况下,PyTorch张量可能不是连续的,这可能会导致一些计算问题。.contiguous()方法将确保张量的内存布局是连续的。.view(-1): 这是一个形状变换操作。它将张量重新整形为一维张量,其中"-1" 表示根据张量的大小自动推断新的形状。这通常用于将多维张量展平为一维,以便进行后续计算或操作。
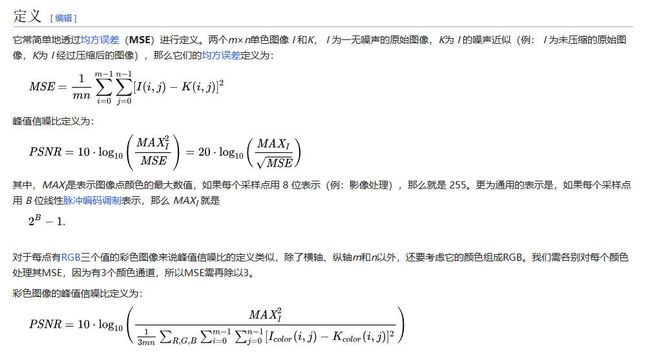
PSNR
峰值信噪比 (PSNR) 是最流行的图像质量评估指标之一。然而 PSNR 侧重于像素差异,并且仅与两者的 MSE 相关,因此在表示现实世界 SR 重建的质量方面往往表现不佳。
# Loss_PSNR 类定义了计算峰值信噪比(PSNR)的损失函数。
# forward 方法接受真实图像(im_true)和生成图像(im_fake)作为输入。
# data_range 参数用于指定数据范围,默认为255。
# 函数首先将输入图像缩放到指定数据范围,然后计算图像之间的均方差误差(err)。
# 最后,通过计算 PSNR 并返回平均 PSNR 值。
class Loss_PSNR(nn.Module):
def __init__(self):
super(Loss_PSNR, self).__init__()
def forward(self, im_true, im_fake, data_range=255):
Itrue = im_true.clamp(0., 1.) * data_range
Ifake = im_fake.clamp(0., 1.) * data_range
err = Itrue - Ifake
err = torch.pow(err, 2)
err = torch.mean(err, dim=0)
err = torch.mean(err, dim=0)
psnr = 10. * torch.log10((data_range ** 2) / err)
psnr = torch.mean(psnr)
return psnr
SSIM
结构相似性指标[1](英语:structural similarity index,SSIM index)是一种用以衡量两张数字图像相似程度的指标。当两张图像其中一张为无失真图像,另一张为失真后的图像,二者的结构相似性可以看成是失真图像的图像质量衡量指标。相较于传统所使用的图像质量衡量指标,像是峰值信噪比(英语:PSNR),结构相似性在图像质量的衡量上更能符合人眼对图像质量的判断[2][3]
由于人类的主观感知对观察对象的结构很敏感,研究人员提出了结构相似性 (SSIM) [25] 指数来衡量标记图像和重建图像之间的结构相似性。对于图像I的亮度μI和对比度σI,它们是根据图像强度的平均值和标准差来估计的

from skimage.metrics import structural_similarity as compare_ssim
SSIM = compare_ssim(X=x_true, Y=x_pred)
MSSIM
MSSIM用于计算两幅高光谱图像之间的平均结构相似度。MSSIM计算方法很简单,只需要分别计算不同波段的SSIM指数,取均值就可以了。
def mssim(x_true,x_pred):
"""
:param x_true: 高光谱图像:格式:(H, W, C)
:param x_pred: 高光谱图像:格式:(H, W, C)
:return: 计算原始高光谱数据与重构高光谱数据的结构相似度
"""
SSIM = compare_ssim(X=x_true, Y=x_pred, multichannel=True)
return SSIM
EGARS
ERGAS(全称:Normalized Global Error (ERGAS))是一种用于评估遥感图像质量的指标。它通常用于评估图像处理或压缩算法的性能,以及遥感图像的质量,特别是在图像压缩、图像增强和图像恢复等领域中。
ERGAS的计算公式如下:
E R G A S = 1 N ∑ i = 1 N ( 100 L 1 M S E i ∑ j = 1 L ( R M S E i j Y i ) 2 ) ERGAS = \sqrt{\frac{1}{N} \sum_{i=1}^{N} \left( \frac{100}{L} \sqrt{\frac{1}{MSE_i} \sum_{j=1}^{L} \left(\frac{RMSE_{ij}}{Y_i}\right)^2}\right)} ERGAS=N1i=1∑N L100MSEi1j=1∑L(YiRMSEij)2
其中,
- N表示图像的波段数;
- L表示图像的灰度级数;
- M S E i MSE_i MSEi是第i个波段的均方误差(Mean Squared Error);
- R M S E i j RMSE_{ij} RMSEij是第i个波段中第j个像素的均方根误差(Root Mean Squared Error);
- Y i Y_i Yi是第i个波段的平均亮度。
ERGAS的值通常以百分比表示,越低的ERGAS值表示图像质量越高。ERGAS主要用于比较不同图像处理算法或压缩方法的性能,以确定它们对图像质量的影响。
总的来说,ERGAS是一种用于评估遥感图像质量的定量指标,它考虑了图像的均方误差、均方根误差以及亮度信息,以提供对图像处理或压缩算法性能的综合评估。
import numpy as np
# 定义一个函数来计算ERGAS
def calculate_ergas(reference_image, processed_image):
# 获取图像的尺寸
height, width, num_bands = reference_image.shape
# 初始化变量用于计算各个波段的MSE和RMSE
mse_values = []
rmse_values = []
for band in range(num_bands):
# 计算MSE(均方误差)
mse = np.mean((reference_image[:, :, band] - processed_image[:, :, band]) ** 2)
mse_values.append(mse)
# 计算RMSE(均方根误差)
rmse = np.sqrt(mse)
rmse_values.append(rmse)
# 计算每个波段的平均亮度
average_brightness = [np.mean(reference_image[:, :, band]) for band in range(num_bands)]
# 定义常数参数
N = num_bands
L = 256 # 假设灰度级数为256
# 计算ERGAS
ergas_values = []
for mse, rmse, Y in zip(mse_values, rmse_values, average_brightness):
ergas_values.append((100 / L) * np.sqrt(1 / mse) * (rmse / Y) ** 2)
ergas = np.sqrt((1 / N) * np.sum(ergas_values))
return ergas
# 示例用法
if __name__ == "__main__":
# 假设有两遥感图像:reference_image为参考图像,processed_image为经过处理的图像
# 这里使用随机生成的示例图像数据,您应该替换为实际数据
height, width, num_bands = 100, 100, 3
reference_image = np.random.rand(height, width, num_bands)
processed_image = np.random.rand(height, width, num_bands)
# 计算ERGAS值
ergas_value = calculate_ergas(reference_image, processed_image)
print(f"ERGAS值为: {ergas_value}")