OpenCV入门9——目标识别(车辆统计)
文章目录
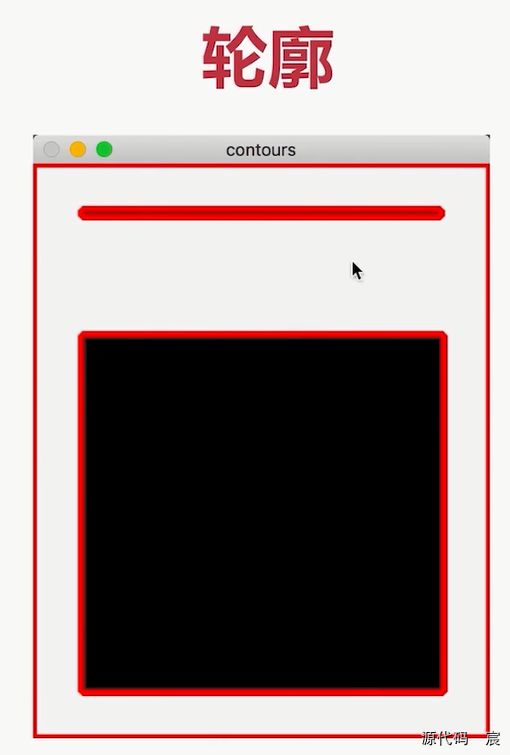
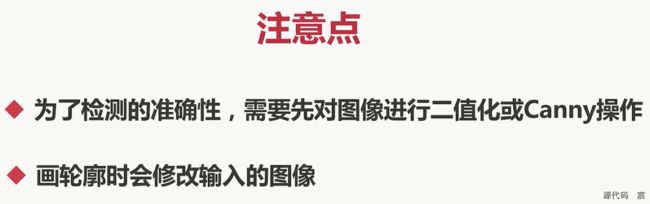
- 图像轮廓
- 查找轮廓
- 绘制轮廓
- 轮廓的面积与周长
- 多边形逼近与凸包
- 外接矩形
- 项目总览【车辆统计】
- 视频加载【车辆统计】
- 去背景【车辆统计】
- 形态学处理【车辆统计】
- 逻辑处理【车辆统计】
- 显示信息【车辆统计】
图像轮廓

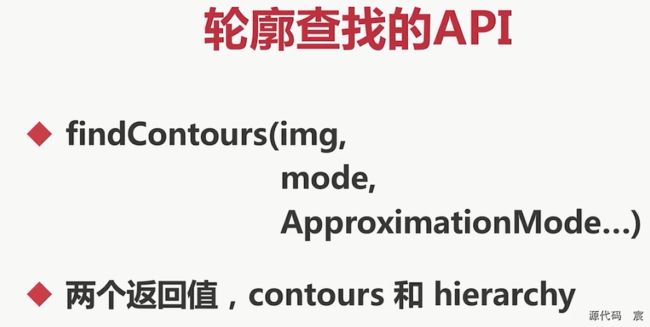
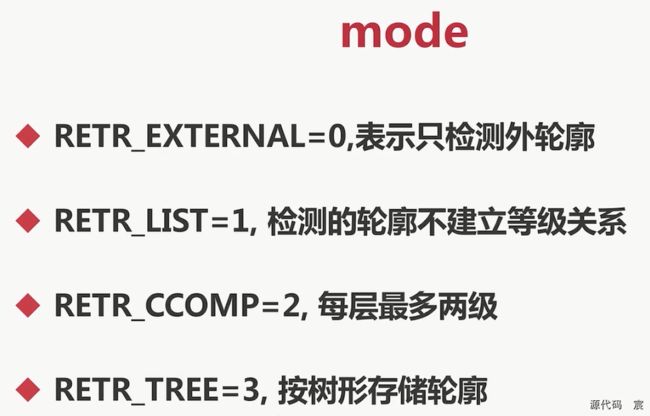




查找轮廓
# -*- coding: utf-8 -*-
import cv2
import numpy as np
img = cv2.imread('./contours1.jpeg')
# print(img.shape)
# 转变为单通道
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
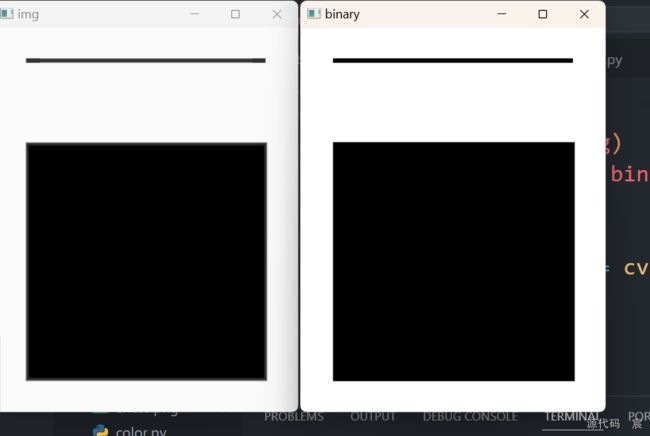
ret, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# print(gray.shape)
cv2.imshow('img', img)
cv2.imshow('binary', binary)
# 轮廓查找
contours, hierarchy = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
print(contours)
key = cv2.waitKey(0) & 0xff
if key == ord('q'):
cv2.destroyAllWindows()

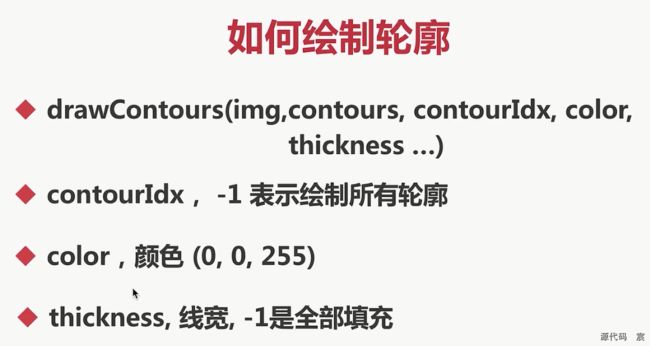
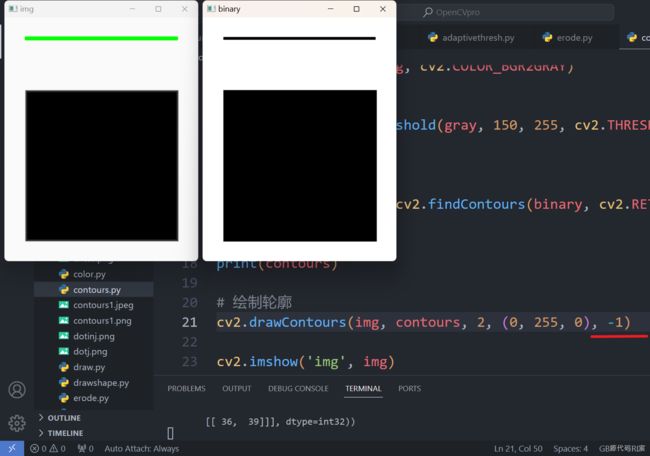
绘制轮廓
# -*- coding: utf-8 -*-
import cv2
import numpy as np
img = cv2.imread('./contours1.jpeg')
# print(img.shape)
# 转变为单通道
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
ret, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# print(gray.shape)
# 轮廓查找
contours, hierarchy = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
print(contours)
# 绘制轮廓
cv2.drawContours(img, contours, -1, (0, 255, 0), 1)
cv2.imshow('img', img)
cv2.imshow('binary', binary)
key = cv2.waitKey(0) & 0xff
if key == ord('q'):
cv2.destroyAllWindows()

详细可参考官方资料
# -*- coding: utf-8 -*-
import cv2
import numpy as np
img = cv2.imread('./contours1.jpeg')
# print(img.shape)
# 转变为单通道
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
ret, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# print(gray.shape)
# 轮廓查找
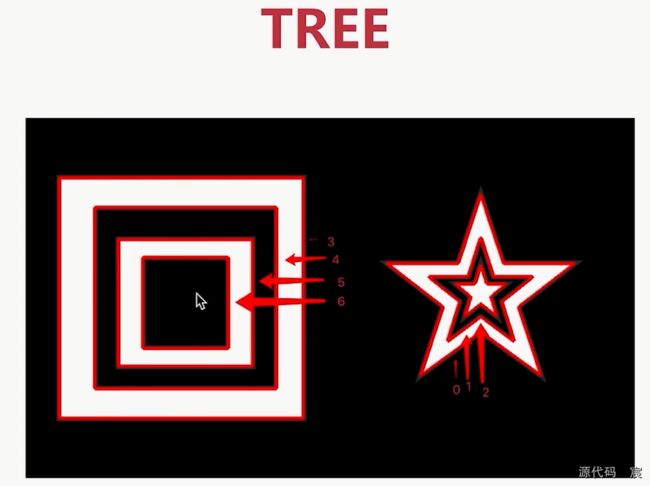
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
print(contours)
# 绘制轮廓
cv2.drawContours(img, contours, -1, (0, 255, 0), 1)
cv2.imshow('img', img)
cv2.imshow('binary', binary)
key = cv2.waitKey(0) & 0xff
if key == ord('q'):
cv2.destroyAllWindows()


轮廓的面积与周长

# -*- coding: utf-8 -*-
import cv2
import numpy as np
img = cv2.imread('./contours1.jpeg')
# print(img.shape)
# 转变为单通道
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
ret, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# print(gray.shape)
# 轮廓查找
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
print(contours)
# 绘制轮廓
cv2.drawContours(img, contours, 0, (0, 255, 0), 1)
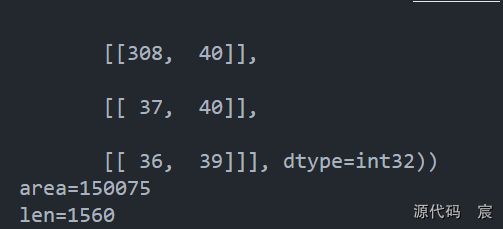
# 计算面积
area = cv2.contourArea(contours[0])
print("area=%d"%(area))
# 计算周长
len = cv2.arcLength(contours[0], True)
print("len=%d"%(len))
# cv2.imshow('img', img)
# cv2.imshow('binary', binary)
# key = cv2.waitKey(0) & 0xff
# if key == ord('q'):
# cv2.destroyAllWindows()
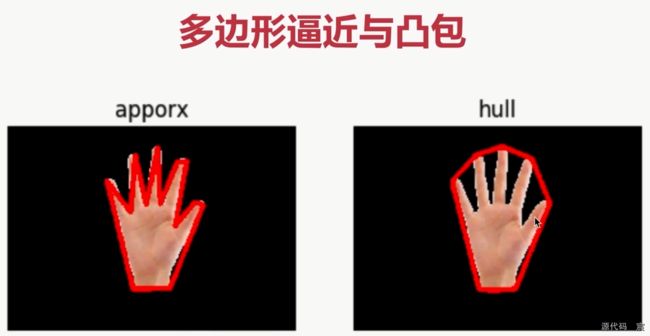
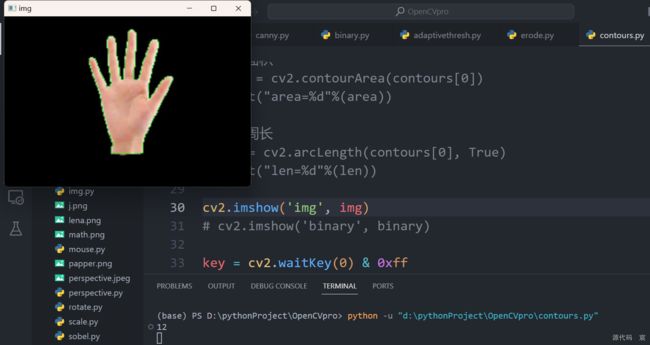
多边形逼近与凸包

# -*- coding: utf-8 -*-
import cv2
import numpy as np
img = cv2.imread('./hand.png')
# print(img.shape)
# 转变为单通道
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
ret, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# print(gray.shape)
# 轮廓查找
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
print(len(contours))
# 绘制轮廓
cv2.drawContours(img, contours, 0, (0, 255, 0), 1)
# 计算面积
# area = cv2.contourArea(contours[0])
# print("area=%d"%(area))
# 计算周长
# len = cv2.arcLength(contours[0], True)
# print("len=%d"%(len))
cv2.imshow('img', img)
# cv2.imshow('binary', binary)
key = cv2.waitKey(0) & 0xff
if key == ord('q'):
cv2.destroyAllWindows()
# -*- coding: utf-8 -*-
import cv2
import numpy as np
def drawShape(src, points):
i = 0
while i < len(points):
if(i == len(points) - 1):
x, y = points[i][0]
x1, y1 = points[0][0]
cv2.line(src, (x, y), (x1, y1), (0, 255, 0), 2)
else:
x, y = points[i][0]
x1, y1 = points[i + 1][0]
cv2.line(src, (x, y), (x1, y1), (0, 255, 0), 2)
i = i + 1
img = cv2.imread('./hand.png')
# print(img.shape)
# 转变为单通道
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
ret, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# print(gray.shape)
# 轮廓查找
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# print(len(contours))
# 绘制轮廓
# cv2.drawContours(img, contours, 0, (0, 255, 0), 1)
# 计算面积
# area = cv2.contourArea(contours[0])
# print("area=%d"%(area))
# 计算周长
# len = cv2.arcLength(contours[0], True)
# print("len=%d"%(len))
e = 5
approx = cv2.approxPolyDP(contours[0], e, True)
drawShape(img, approx)
hull = cv2.convexHull(contours[0])
drawShape(img, hull)
cv2.imshow('img', img)
# cv2.imshow('binary', binary)
key = cv2.waitKey(0) & 0xff
if key == ord('q'):
cv2.destroyAllWindows()

外接矩形
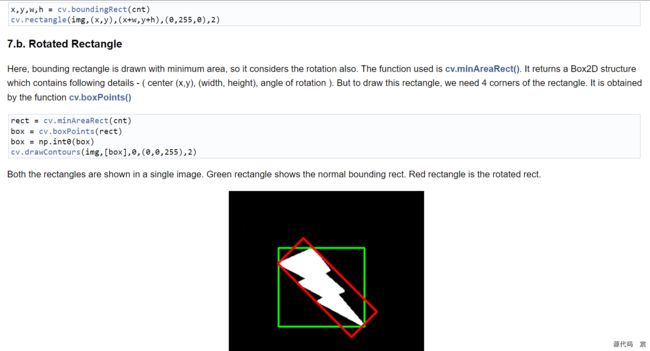
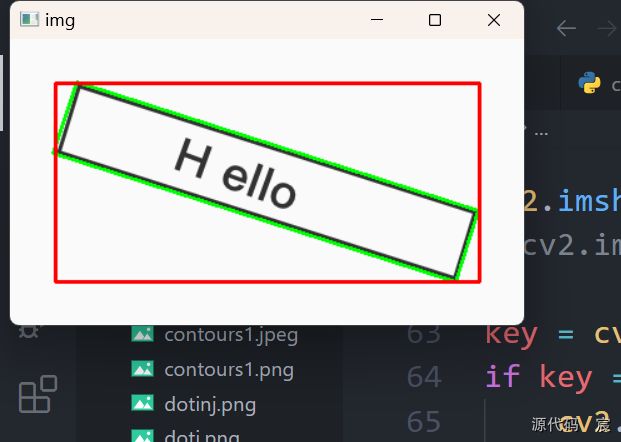
红框就是最小外接矩形,绿框就是最大外接矩形。
最小外接矩形可以看图形有没有旋转


详情见参考文档
# -*- coding: utf-8 -*-
import cv2
import numpy as np
def drawShape(src, points):
i = 0
while i < len(points):
if(i == len(points) - 1):
x, y = points[i][0]
x1, y1 = points[0][0]
cv2.line(src, (x, y), (x1, y1), (0, 255, 0), 2)
else:
x, y = points[i][0]
x1, y1 = points[i + 1][0]
cv2.line(src, (x, y), (x1, y1), (0, 255, 0), 2)
i = i + 1
img = cv2.imread('./hello.jpeg')
# print(img.shape)
# 转变为单通道
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
ret, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# print(gray.shape)
# 轮廓查找
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# print(len(contours))
# 绘制轮廓
# cv2.drawContours(img, contours, 1, (0, 255, 0), 1)
# 计算面积
# area = cv2.contourArea(contours[0])
# print("area=%d"%(area))
# 计算周长
# len = cv2.arcLength(contours[0], True)
# print("len=%d"%(len))
# e = 5
# 多边形逼近
# approx = cv2.approxPolyDP(contours[0], e, True)
# drawShape(img, approx)
# 凸包
# hull = cv2.convexHull(contours[0])
# drawShape(img, hull)
r = cv2.minAreaRect(contours[1])
box = cv2.boxPoints(r)
box = np.int0(box)
cv2.drawContours(img, [box], 0, (0, 255, 0), 2)
x, y, w, h = cv2.boundingRect(contours[1])
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 2)
cv2.imshow('img', img)
# cv2.imshow('binary', binary)
key = cv2.waitKey(0) & 0xff
if key == ord('q'):
cv2.destroyAllWindows()
项目总览【车辆统计】

视频加载【车辆统计】
# -*- coding: utf-8 -*-
import cv2
import numpy as np
cap = cv2.VideoCapture('./video.mp4')
while True:
ret, frame = cap.read()
if(ret == True):
cv2.imshow('video', frame)
key = cv2.waitKey(1)
if(key == 27):
break
cap.release()
cv2.destroyAllWindows()
去背景【车辆统计】
如果视频是25fps,即每秒25帧,即1000ms过25帧,那么200ms就走5帧(25/1000*200=5)

运动的物体为前景,静止的物体就是背景
详细可以参考官方文档
# -*- coding: utf-8 -*-
import cv2
import numpy as np
cap = cv2.VideoCapture('./video.mp4')
bgsubmog = cv2.createBackgroundSubtractorMOG2()
while True:
ret, frame = cap.read()
if(ret == True):
mask = bgsubmog.apply(frame)
cv2.imshow('video', mask)
key = cv2.waitKey(1)
if(key == 27):
break
cap.release()
cv2.destroyAllWindows()

# -*- coding: utf-8 -*-
import cv2
import numpy as np
cap = cv2.VideoCapture('./video.mp4')
bgsubmog = cv2.createBackgroundSubtractorMOG2()
tst = cv2.createBackgroundSubtractorMOG2()
while True:
ret, frame = cap.read()
if(ret == True):
# 灰度图
cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 去噪(高斯)
blur = cv2.GaussianBlur(frame, (3, 3), 5)
# 去背景
mask = bgsubmog.apply(blur)
t = tst.apply(frame)
cv2.imshow('video', mask)
cv2.imshow('t', t)
key = cv2.waitKey(40)
if(key == 27):
break
cap.release()
cv2.destroyAllWindows()

形态学处理【车辆统计】
# -*- coding: utf-8 -*-
import cv2
import numpy as np
cap = cv2.VideoCapture('./video.mp4')
bgsubmog = cv2.createBackgroundSubtractorMOG2()
# tst = cv2.createBackgroundSubtractorMOG2()
# 形态学kernel
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
kernel2 = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
while True:
ret, frame = cap.read()
if(ret == True):
# 灰度图
cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 去噪(高斯)
blur = cv2.GaussianBlur(frame, (3, 3), 1)
# 去背景
mask = bgsubmog.apply(blur)
# t = tst.apply(frame)
# 腐蚀,去掉图中小斑块
erode = cv2.erode(mask, kernel, iterations=1)
# 膨胀,还原放大
dilate = cv2.dilate(erode, kernel2, iterations=5)
# 闭操作,去掉物体内部噪声
close = cv2.morphologyEx(dilate, cv2.MORPH_CLOSE, kernel)
close = cv2.morphologyEx(close, cv2.MORPH_CLOSE, kernel)
contours, hierarchy = cv2.findContours(close, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
for i, c in enumerate(contours):
x, y, w, h = cv2.boundingRect(c)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.imshow('video', frame)
# cv2.imshow('erode', close)
key = cv2.waitKey(40)
if(key == 27):
break
cap.release()
cv2.destroyAllWindows()
逻辑处理【车辆统计】
# -*- coding: utf-8 -*-
import cv2
import numpy as np
min_w = 50
min_h = 50
max_w = 800
max_h = 800
# 检测线的高度
line_high = 480
# 存放有效车辆数组
cars = []
# 统计车的数量
carnums = 0
# 线的偏移
offset = 10
# 求中心点
def center(x, y, w, h):
x1 = int(w / 2)
y1 = int(h / 2)
cx = x + x1
cy = y + y1
return cx, cy
cap = cv2.VideoCapture('./video.mp4')
bgsubmog = cv2.createBackgroundSubtractorMOG2()
# tst = cv2.createBackgroundSubtractorMOG2()
# 形态学kernel
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
kernel2 = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
while True:
ret, frame = cap.read()
if(ret == True):
# print(frame.shape)
# (584, 1280, 3)
# 灰度图
cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 去噪(高斯)
blur = cv2.GaussianBlur(frame, (3, 3), 1)
# 去背景
mask = bgsubmog.apply(blur)
# t = tst.apply(frame)
# 腐蚀,去掉图中小斑块
erode = cv2.erode(mask, kernel, iterations=1)
# 膨胀,还原放大
dilate = cv2.dilate(erode, kernel2, iterations=3)
# 闭操作,去掉物体内部噪声
close = cv2.morphologyEx(dilate, cv2.MORPH_CLOSE, kernel)
close = cv2.morphologyEx(close, cv2.MORPH_CLOSE, kernel)
contours, hierarchy = cv2.findContours(close, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
cv2.line(frame, (100, line_high), (1100, line_high), (255, 255, 0), 2)
for i, c in enumerate(contours):
x, y, w, h = cv2.boundingRect(c)
# 对车辆的宽高进行判断,以验证是否是有效车辆
isValid = (x >= min_w) and (h >= min_h) and (x <= max_w) and (h <= max_h)
if(not isValid):
continue
# 有效的车
cpoint = center(x, y, w, h)
cars.append(cpoint)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
for xc, yc in cars:
if(yc > line_high - offset and yc < line_high + offset):
carnums += 1
cars.remove((xc, yc))
print(carnums)
cv2.imshow('video', frame)
# cv2.imshow('erode', close)
key = cv2.waitKey(40)
if(key == 27):
break
cap.release()
cv2.destroyAllWindows()
显示信息【车辆统计】
# -*- coding: utf-8 -*-
import cv2
import numpy as np
min_w = 50
min_h = 50
max_w = 800
max_h = 800
# 检测线的高度
line_high = 480
# 存放有效车辆数组
cars = []
# 统计车的数量
carnums = 0
# 线的偏移
offset = 10
# 求中心点
def center(x, y, w, h):
x1 = int(w / 2)
y1 = int(h / 2)
cx = x + x1
cy = y + y1
return cx, cy
cap = cv2.VideoCapture('./video.mp4')
bgsubmog = cv2.createBackgroundSubtractorMOG2()
# tst = cv2.createBackgroundSubtractorMOG2()
# 形态学kernel
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
kernel2 = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
while True:
ret, frame = cap.read()
if(ret == True):
# print(frame.shape)
# (584, 1280, 3)
# 灰度图
cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 去噪(高斯)
blur = cv2.GaussianBlur(frame, (3, 3), 1)
# 去背景
mask = bgsubmog.apply(blur)
# t = tst.apply(frame)
# 腐蚀,去掉图中小斑块
erode = cv2.erode(mask, kernel, iterations=1)
# 膨胀,还原放大
dilate = cv2.dilate(erode, kernel2, iterations=3)
# 闭操作,去掉物体内部噪声
close = cv2.morphologyEx(dilate, cv2.MORPH_CLOSE, kernel)
close = cv2.morphologyEx(close, cv2.MORPH_CLOSE, kernel)
contours, hierarchy = cv2.findContours(close, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 画一条检测线
cv2.line(frame, (100, line_high), (1100, line_high), (255, 255, 0), 2)
for i, c in enumerate(contours):
x, y, w, h = cv2.boundingRect(c)
# 对车辆的宽高进行判断,以验证是否是有效车辆
isValid = (x >= min_w) and (h >= min_h) and (x <= max_w) and (h <= max_h)
if(not isValid):
continue
# 有效的车
cpoint = center(x, y, w, h)
cars.append(cpoint)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.circle(frame, (cpoint), 5, (0, 0, 255), -1)
for xc, yc in cars:
if(yc > line_high - offset and yc < line_high + offset):
carnums += 1
cars.remove((xc, yc))
print(carnums)
cv2.putText(frame, "Cars Count:" + str(carnums), (500, 60), cv2.FONT_HERSHEY_SIMPLEX, 2, (0, 255, 0), 3)
cv2.imshow('video', frame)
# cv2.imshow('erode', close)
key = cv2.waitKey(40)
if(key == 27):
break
cap.release()
cv2.destroyAllWindows()
通过实践可以发现传统的目标检测缺点很多,比方说可能重复计数…所以之后我们需要结合深度学习来提高目标检测的精度
之后我会持续更新,如果喜欢我的文章,请记得一键三连哦,点赞关注收藏,你的每一个赞每一份关注每一次收藏都将是我前进路上的无限动力 !!!↖(▔▽▔)↗感谢支持!