并行与分布式计算 第8章 并行计算模型
文章目录
- 并行与分布式计算 第8章 并行计算模型
-
- 8.1 并行算法基础
-
- 8.1.1 并行算法的定义
- 8.1.2并行算法的分类
- 8.1.3算法的复杂度
- 8.2 并行计算模型
-
- 8.2.1 PRAM (SIMD-SM)模型
- 8.2.3 BSP (MIMD-DM)模型
- 8.2.4LogP(MIMD-DM)模型
并行与分布式计算 第8章 并行计算模型
8.1 并行算法基础
8.1.1 并行算法的定义
并行算法:适合于在各种并行计算机上求解问题和处理数据的算法,它是一些可同时执行的诸进程的集合,这些进程相互作用和协调动作从而达到对给定问题的求解。
8.1.2并行算法的分类
| 分类标准 | 运算类型 |
|---|---|
| 数值计算 vs 非数值计算 | 数值计算涉及数字和数学运算,如矩阵运算、多项式求解等。非数值计算涉及非数值数据的处理和操作,如排序、选择、搜索、匹配、图论等。 |
| 同步运算 vs 异步运算 | 同步运算需要等待其他进程或操作结果,异步运算不需要等待其他进程的完成。 |
| 确定运算 vs 随机运算 | 确定运算的每一步都能明确指示下一步应该如何进行,随机运算的某些步骤涉及随机选择或随机参数。 |
8.1.3算法的复杂度
并行算法的复杂性度量指标1
运行时间t(n):在给定的模型上求解输入规模为n的给定问题所需时间,即
算法从第一台处理机开始执行到最后一台处理机执行中止所需时间。
** t(n)包括两个部分:**
- 计算时间tc:在某一处理器执行运算所需时间;
- 通信时间tr:数据从源处理机到目的处理机所需传送时间,算法在整个
执行期间能传送的报文总数称为通信复杂度。
并行算法的复杂性度量指标2
• 处理机数p(n):求解给定问题所需的处理机数
• 并行算法的成本c(n) =t(n) x p(n)
• 成本最优(Cost Optimal):c(n)=t(n)*p(n)=串行计算的步数(节拍数)
• 工作量最优:功耗低、环保
并行算法的复杂性度量指标3(Brent定理)
令W(n)是某并行算法A在运行时间T(n)内所执行的运算量,则A使用p台处理器可在t(n)=O(W(n)/p+T(n))时间内执行完毕
W(n)和c(n)密切相关:c(n) =t(n) x p= O(W(n)/p+T(n)) x p = O(W(n) +p x T(n)), 因此当p=O(W(n)/T(n))时,c(n) = O(W(n)),W(n)和c(n)两者是渐近一致的;
推论:对于任意的p,c(n)>W(n),说明算法在运行过程中不一定能够充分利用处理器。
8.2 并行计算模型
并行计算模型通常指从并行算法的设计和分析出发,将各种并行计算机(至少某一类并行计算机)的基本特征抽象出来,形成一个抽象的计算模型。从更广的意义上说,并行计算模型为并行计算提供了硬件和软件界面,在该界面的约定下,并行系统硬件设计者和软件设计者可以开发对并行性的支持机制,从而提高系统的性能。
8.2.1 PRAM (SIMD-SM)模型
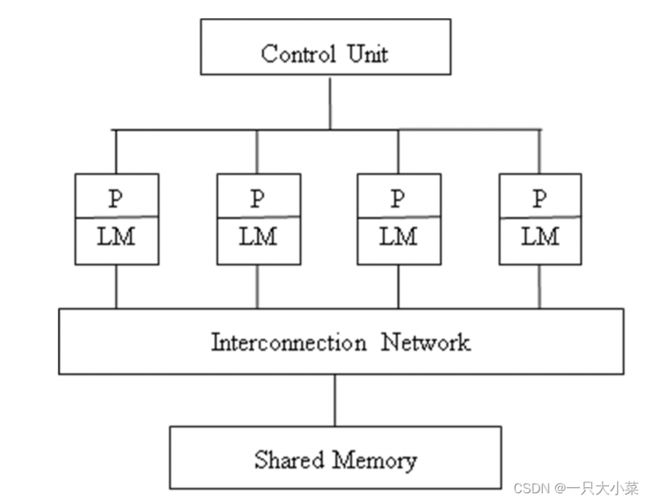
并行随机存取机器(Parallel Random Access Machine, PRAM)模型,也称为 SIMD-SM模型(共享存储的SIMD模型)
- 一个集中的共享存储器,假设其容量M无限大;
- N个功能相同的处理器,每个处理器具有简单的算术运算和逻辑判断能力,每个处理器都具有局部存储器LM。
- 所有指令均按照操作,在每一个计算步内,任一个处理器均可通过对共享存储器的某共享单元读写,同其他任一处理器交换数据,因此要求所有处理器共享单一的数据地址空间;
- 每个处理器内部都没有控制器组件,所有的处理器共享一个控制器, 因此要求所有处理器共享单一的程序地址空间;
- 采用隐式同步机制,诸如处理器间通讯、存储管理、进程同步、存储 带宽和延迟等并行机的低级操作细节均隐含于模型中。
PRAM (SIMD-SM)计算模式
- PRAM-EREW互斥读互斥写(最弱)
- PRAM-CREW并发读互斥写(居中)
- PRAM-CRCW并发读并发写(最强)
• C代表Concurrent,允许并发操作
• E-代表Exclusive,禁止并发操作
PRAM (SIMD-SM)复杂度分析
TEREW = O(TCREW *log p) = O(TCRCW * log p)
如果一个算法在PRAM-CREW或PRAM-CRCW上的时间复杂度为T,则这个算法可以在PRAM-EREW上以 时间复杂度为logp x T运行。
PRAM-CRCW的分类
• Common PRAM-CRCW:仅允许所有处理器同时写入相同数据
• Priority PRAM-CRCW:仅允许优先级最高的处理器写入
• Arbitrary PRAM-CRCW:允许任意处理器自由写入
(MIMD-SM)模型
异步并行随机存取机器(Asynchronous Parallel Random Access Machine, APRAM)模型,也称为MIMD-SM模型,也称为分相(Phase)PRAM模型。
• 一个集中的共享存储器,假设其容量M无限大;
• N个处理器,每个处理器内部,有简单的算术运算和逻辑判断电路,有独立的控制器,有局部存储器LM,有局部时钟;
• 处理器之间的通信要通过共享存储器来完成,因此要求所有处理器共享单一的数据地址空间;
• 每个处理器内部都有独立的控制器组件,因此要求所有处理器都有独立得程序地址空间;
• 异步操作+显式同步。系统没有全局时钟,每个处理器异步的执行局 部程序,处理器之间的时间依赖关系(例如,通过共享变量的读写操作实 现通信等)需要在各个处理器的局部程序中加入同步路障(Synchronization Barrier)来实现,两次同步路障的时间间隔称为一个相(phase)


APRAM (MIMD-SM)计算模式分析
• 整个计算过程系由一系列同步路障分开的多个全局相所组成。
• 在每个全局相内,每个处理器异步的运行其局部程序;
• 每个局部程序中的最后一条指令是一条同步路障指令;
• 各个处理器均可异步地读取和写入全局存储器,但在同一个全局相内不允许两个处理器访问同一存储单元。
• 程序内指令的分类:全局同步,全局读/写,局部操作
APRAM (MIMD-SM)复杂度分析:
• 设局部操作为单位时间;
• 全局读/写平均时间为d,d随着处理器数目的增加而增加;
• 同步路障时间为B=B§,它是处理器数p的非降函数,通常
处理器越多导致同步时间越长。
• 设Ti为第i个全局相内各处理器执行时间最长者;
• 则T=T1+T2+…+Tn+ B x (n-1)
8.2.3 BSP (MIMD-DM)模型
块同步(Bulk Synchronization Parallel)模型,也称为MIMD- DM(distributed memory)模型,也称为大同步模型、桥模型, 桶同步并行模型。
• 系统中有p个计算节点,每个计算节点内部有独立的运算 器,独立的控制器,独立的存储器,独立的局部时钟;因此, 每个处理器有独立的数据地址空间和程序地址空间,可以异步 的执行局部程序;
• 系统中有一个路由器,该路由器连接所有计算节点,实施计算节点之间点到点的消息传递,该路由器的吞吐率和延迟是有限的,吞吐率th(字节每秒),传输延迟tl(秒);
• 系统中有一个路障同步器,路障同步器每隔时间间隔L完 成一次全局路障同步操作,以实现计算节点之间的时间依赖关 系(例如,通过共享变量的读写操作实现通信等)。

BSP(MIMD-DM)复杂度分析:
• 设Wk为第k个超级步内各节点局部程序中本地计算运行时间最 长者;
• 设Hk为第k个超级步内各节点局部程序中收发消息个数最多者 的收发操作执行时间;
• 设每次全局同步路障的开销为B; • 设每个数据包大小q个字节;
• 则Hk=h*(tl (传输延迟) +q/th(吞吐率)) • 一个超级步内的总时间开销为Tk=Wk + Hk +B; (Tk需要小于 等于L,效率为Tk/L)
• s个超级步内的总时间开销为T=W1+W2+…+Ws +
H1+H2+…+Hs + s x B;(T需要小于等于sL,效率为T/(sL))
BSP与MapReduce对比
• 执行机制:MapReduce是一个数据流模型,每个任务只是对输入数
据进行处理,产生的输出数据作为另一个任务的输入数据,并行任
务之间独立地进行,串行任务之间以磁盘和数据复制作为交换介质
和接口。
• BSP是一个状态模型,各个子任务在本地的子图数据上进行计算、
通信、修改图的状态等操作,并行任务之间通过消息通信交流中间
计算结果,不需要像MapReduce那样对全体数据进行复制。
• MapReduce的设计初衷:解决大规模、非实时数据处理问题。"大规
模"决定数据有局部性特性可利用(从而可以划分)、可以批处理;
"非实时"代表响应时间可以较长,有充分的时间执行程序。而BSP
模型在实时处理有优异的表现。这是两者最大的一个区别。
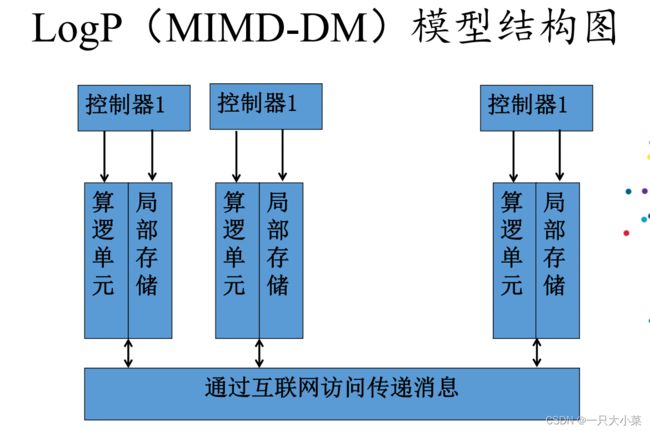
8.2.4LogP(MIMD-DM)模型
• LogP是使用L,O,G,P四个参数来描述的一种面向分布式存储 器、点对点通信的多计算机系统的并行计算模型。
• L (Latency) :表示信息从源节点到目的节点所需的时间;
• O (Overhead) :表示节点接收或发送一条消息所需额外开销 (操作系统开销和网络软件开销),并且在此期间节点不 能做作任何操作;
• G (Gap):表示节点连续进行两次发送或接收消息之间必须 有的时间间隔,超过此间隔则数据包会因拥塞而被网络丢 弃,因此实际上此参数是对网络的限制而非对节点的限制;
• P (Processor) :表示节点的数目
LogP(MIMD-DM)模型的特点
• 系统中有p个计算节点,每个计算节点内部有独立的
运算器,独立的控制器,独立的存储器,独立的局部时钟;
因此,每个处理器有独立的数据地址空间和程序地址空间,
可以异步的执行局部程序;
• 系统中有一个大型互连网络(多个路由器节点组成的
数据交换阵列),该互连网络连接所有节点,实施节点之
间点到点的消息传递,该互连网络的带宽和延迟是有限的,
带宽为g的倒数(字节每秒),传输延迟L(秒);
• 通过节点间的个体消息传递实现同步操作,一旦消息
到达了处理器就可以立即使用。
LogP模型小结
- 即时通信
• LogP不再把所有的计算和通信视为一个整体行为,而是一个单独的进程的个体活动;它让每个进程按需排布计算操作和消息收发,一旦收到消息立即可以使用; - 同步开销 LopP不需要路障同步器,将路障同步的开销降低为两个进程之间的信息收发时间差;
- 硬件气泡
•节点执行计算操作时网络资源空闲,节点执行消息收发时计算资源空闲,非阻塞进程不必等待阻塞进程避免了节点空转;可使用节点内多进程/多线程来填充气泡 - Tradeoff
• 编程的随意性v.s.性能的可预测性

Multi-BSP (多层架构)模型
multi-BSP从两个方向拓展了BSP :
• multi-BSP model是一个层次模型,它可以表示出单芯片或多芯片架构中的多个memory或多个cache。
• 在每一层中,multi-BSP都将存储大小作为一个参数。
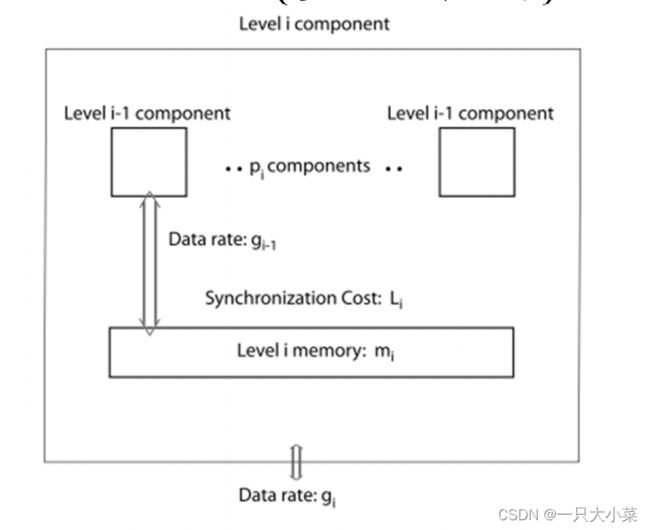
Multi-BSP model实际上是一个深度为D的树,内部节点表示memory 和cache,叶子节点表示处理器,每一层有四个参数(pi, gi, Li, mi):
• pi表示子组件的数量,
• gi表示通信带宽,
• Li表示同步成本,
• mi表示memory或cache的大小。
Multi-BSP (多层架构)模型的架构