485 实验
485(一般称作 RS485/EIA-485)隶属于 OSI 模型物理层,是串行通讯的一种。电气特性规定 为 2 线,半双工,多点通信的类型。它的电气特性和 RS-232 大不一样。用缆线两端的电压差值 来表示传递信号。RS485 仅仅规定了接受端和发送端的电气特性。它没有规定或推荐任何数据 协议。
RS485 的特点包括:
1, 接口电平低,不易损坏芯片。RS485 的电气特性:逻辑“1”以两线间的电压差为+(2~6)V 表 示;逻辑“0”以两线间的电压差为-(2~6)V 表示。接口信号电平比 RS232 降低了,不易损 坏接口电路的芯片,且该电平与 TTL 电平兼容,可方便与 TTL 电路连接。
2, 传输速率高。10 米时,RS485 的数据最高传输速率可达 35Mbps,在 1200m 时,传输速度 可达 100Kbps。
3, 抗干扰能力强。RS485 接口是采用平衡驱动器和差分接收器的组合,抗共模干扰能力增强, 即抗噪声干扰性好。
4, 传输距离远,支持节点多。RS485 总线最长可以传输 1200m 左右,更远的距离则需要中继 传输设备支持但这时(速率≤100Kbps)才能稳定传输,一般最大支持 32 个节点,如果使 用特制的 485 芯片,可以达到 128 个或者 256 个节点,最大的可以支持到 400 个节点。
RS485 推荐使用在点对点网络中,比如:线型,总线型网络等,而不能是星型,环型网络。 理想情况下 RS485 需要 2 个终端匹配电阻,其阻值要求等于传输电缆的特性阻抗(一般为 120 Ω)。没有特性阻抗的话,当所有的设备都静止或者没有能量的时候就会产生噪声,而且线移需 要双端的电压差。没有终接电阻的话,会使得较快速的发送端产生多个数据信号的边缘,导致 数据传输出错。485 推荐的一主多从连接方式如图 36.1.1 所示: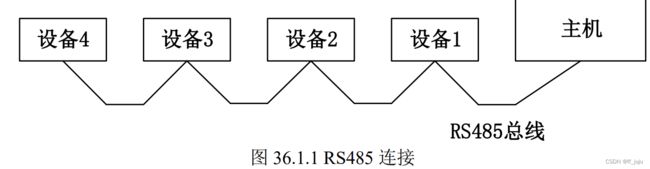
在上面的连接中,如果需要添加匹配电阻,我们一般在总线的起止端加入,也就是主机和 设备 4 上面各加一个 120Ω的匹配电阻。
由于 RS485 具有传输距离远、传输速度快、支持节点多和抗干扰能力更强等特点,所以 RS485有很广泛的应用。实际多设备时收发器有范围为-7V到+12V的共模电压,为了稳定传输, 也有使用 3 线的布线方式,即在原有的 A、B 两线上多增加一条地线。(4 线制使用全双工通讯 方式,这种也叫 RS422,由于布线的难度和通讯局限,相对使用得比较少)
TP8485E/SP3485 可作为 RS485 的收发器,该芯片支持 3.3V~5.5V 供电,最大传输速度可 达 250Kbps,支持多达 256 个节点(单位负载为 1/8 的条件下),并且支持输出短路保护。该芯片的框图如图 36.1.2 所示: 图中 A、B 总线接口,用于连接 485 总线。RO 是接收输出端,DI 是发送数据收入端,RE 是接收使能信号(低电平有效),DE 是发送使能信号(高电平有效)。
图中 A、B 总线接口,用于连接 485 总线。RO 是接收输出端,DI 是发送数据收入端,RE 是接收使能信号(低电平有效),DE 是发送使能信号(高电平有效)。
 代码
代码
rs485.h
#ifndef __RS485_H
#define __RS485_H
#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
/* RS485 引脚 和 串口 定义
*/
#define RS485_RE_GPIO_PORT GPIOD
#define RS485_RE_GPIO_PIN GPIO_PIN_7
#define RS485_RE_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOD_CLK_ENABLE(); }while(0) /* PD口时钟使能 */
#define RS485_TX_GPIO_PORT GPIOA
#define RS485_TX_GPIO_PIN GPIO_PIN_2
#define RS485_TX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */
#define RS485_RX_GPIO_PORT GPIOA
#define RS485_RX_GPIO_PIN GPIO_PIN_3
#define RS485_RX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */
#define RS485_UX USART2
#define RS485_UX_IRQn USART2_IRQn
#define RS485_UX_IRQHandler USART2_IRQHandler
#define RS485_UX_CLK_ENABLE() do{ __HAL_RCC_USART2_CLK_ENABLE(); }while(0) /* USART2 时钟使能 */
/******************************************************************************************/
/* 控制RS485_RE脚, 控制RS485发送/接收状态
* RS485_RE = 0, 进入接收模式
* RS485_RE = 1, 进入发送模式
*/
#define RS485_RE(x) do{ x ? \
HAL_GPIO_WritePin(RS485_RE_GPIO_PORT, RS485_RE_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(RS485_RE_GPIO_PORT, RS485_RE_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
#define RS485_REC_LEN 64 /* 定义最大接收字节数 64 */
#define RS485_EN_RX 1 /* 使能(1)/禁止(0)RS485接收 */
extern uint8_t g_RS485_rx_buf[RS485_REC_LEN]; /* 接收缓冲,最大RS485_REC_LEN个字节 */
extern uint8_t g_RS485_rx_cnt; /* 接收数据长度 */
void rs485_init( uint32_t baudrate); /* RS485初始化 */
void rs485_send_data(uint8_t *buf, uint8_t len); /* RS485发送数据 */
void rs485_receive_data(uint8_t *buf, uint8_t *len);/* RS485接收数据 */
#endif
rs485.c
#include "./BSP/RS485/rs485.h"
#include "./SYSTEM/delay/delay.h"
UART_HandleTypeDef g_rs458_handler; /* RS485控制句柄(串口) */
#ifdef RS485_EN_RX /* 如果使能了接收 */
uint8_t g_RS485_rx_buf[RS485_REC_LEN]; /* 接收缓冲, 最大 RS485_REC_LEN 个字节. */
uint8_t g_RS485_rx_cnt = 0; /* 接收到的数据长度 */
void RS485_UX_IRQHandler(void)
{
uint8_t res;
if ((__HAL_UART_GET_FLAG(&g_rs458_handler, UART_FLAG_RXNE) != RESET)) /* 接收到数据 */
{
HAL_UART_Receive(&g_rs458_handler, &res, 1, 1000);
if (g_RS485_rx_cnt < RS485_REC_LEN) /* 缓冲区未满 */
{
g_RS485_rx_buf[g_RS485_rx_cnt] = res; /* 记录接收到的值 */
g_RS485_rx_cnt++; /* 接收数据增加1 */
}
}
}
#endif
/**
* @brief RS485初始化函数
* @note 该函数主要是初始化串口
* @param baudrate: 波特率, 根据自己需要设置波特率值
* @retval 无
*/
void rs485_init(uint32_t baudrate)
{
/* IO 及 时钟配置 */
RS485_RE_GPIO_CLK_ENABLE(); /* 使能 RS485_RE 脚时钟 */
RS485_TX_GPIO_CLK_ENABLE(); /* 使能 串口TX脚 时钟 */
RS485_RX_GPIO_CLK_ENABLE(); /* 使能 串口RX脚 时钟 */
RS485_UX_CLK_ENABLE(); /* 使能 串口 时钟 */
GPIO_InitTypeDef gpio_initure;
gpio_initure.Pin = RS485_TX_GPIO_PIN;
gpio_initure.Mode = GPIO_MODE_AF_PP;
gpio_initure.Pull = GPIO_PULLUP;
gpio_initure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(RS485_TX_GPIO_PORT, &gpio_initure); /* 串口TX 脚 模式设置 */
gpio_initure.Pin = RS485_RX_GPIO_PIN;
gpio_initure.Mode = GPIO_MODE_AF_INPUT;
HAL_GPIO_Init(RS485_RX_GPIO_PORT, &gpio_initure); /* 串口RX 脚 必须设置成输入模式 */
gpio_initure.Pin = RS485_RE_GPIO_PIN;
gpio_initure.Mode = GPIO_MODE_OUTPUT_PP;
gpio_initure.Pull = GPIO_PULLUP;
gpio_initure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(RS485_RE_GPIO_PORT, &gpio_initure); /* RS485_RE 脚 模式设置 */
/* USART 初始化设置 */
g_rs458_handler.Instance = RS485_UX; /* 选择485对应的串口 */
g_rs458_handler.Init.BaudRate = baudrate; /* 波特率 */
g_rs458_handler.Init.WordLength = UART_WORDLENGTH_8B; /* 字长为8位数据格式 */
g_rs458_handler.Init.StopBits = UART_STOPBITS_1; /* 一个停止位 */
g_rs458_handler.Init.Parity = UART_PARITY_NONE; /* 无奇偶校验位 */
g_rs458_handler.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */
g_rs458_handler.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */
HAL_UART_Init(&g_rs458_handler); /* HAL_UART_Init()会使能UART2 */
#if RS485_EN_RX /* 如果使能了接收 */
/* 使能接收中断 */
__HAL_UART_ENABLE_IT(&g_rs458_handler, UART_IT_RXNE); /* 开启接收中断 */
HAL_NVIC_EnableIRQ(RS485_UX_IRQn); /* 使能USART2中断 */
HAL_NVIC_SetPriority(RS485_UX_IRQn, 3, 3); /* 抢占优先级3,子优先级3 */
#endif
RS485_RE(0); /* 默认为接收模式 */
}
/**
* @brief RS485发送len个字节
* @param buf : 发送区首地址
* @param len : 发送的字节数(为了和本代码的接收匹配,这里建议不要超过 RS485_REC_LEN 个字节)
* @retval 无
*/
void rs485_send_data(uint8_t *buf, uint8_t len)
{
RS485_RE(1); /* 进入发送模式 */
HAL_UART_Transmit(&g_rs458_handler, buf, len, 1000); /* 串口2发送数据 */
g_RS485_rx_cnt = 0;
RS485_RE(0); /* 进入接收模式 */
}
/**
* @brief RS485查询接收到的数据
* @param buf : 接收缓冲区首地址
* @param len : 接收到的数据长度
* @arg 0 , 表示没有接收到任何数据
* @arg 其他, 表示接收到的数据长度
* @retval 无
*/
void rs485_receive_data(uint8_t *buf, uint8_t *len)
{
uint8_t rxlen = g_RS485_rx_cnt;
uint8_t i = 0;
*len = 0; /* 默认为0 */
delay_ms(10); /* 等待10ms,连续超过10ms没有接收到一个数据,则认为接收结束 */
if (rxlen == g_RS485_rx_cnt && rxlen) /* 接收到了数据,且接收完成了 */
{
for (i = 0; i < rxlen; i++)
{
buf[i] = g_RS485_rx_buf[i];
}
*len = g_RS485_rx_cnt; /* 记录本次数据长度 */
g_RS485_rx_cnt = 0; /* 清零 */
}
}
main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
#include "./BSP/RS485/rs485.h"
int main(void)
{
uint8_t key;
uint8_t i = 0, t = 0;
uint8_t cnt = 0;
uint8_t rs485buf[5];
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
led_init(); /* 初始化LED */
lcd_init(); /* 初始化LCD */
key_init(); /* 初始化按键 */
rs485_init(9600); /* 初始化RS485 */
lcd_show_string(30, 50, 200, 16, 16, "STM32", RED);
lcd_show_string(30, 70, 200, 16, 16, "RS485 TEST", RED);
lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);
lcd_show_string(30, 110, 200, 16, 16, "KEY0:Send", RED); /* 显示提示信息 */
lcd_show_string(30, 130, 200, 16, 16, "Count:", RED); /* 显示当前计数值 */
lcd_show_string(30, 150, 200, 16, 16, "Send Data:", RED); /* 提示发送的数据 */
lcd_show_string(30, 190, 200, 16, 16, "Receive Data:", RED);/* 提示接收到的数据 */
while (1)
{
key = key_scan(0);
if (key == KEY0_PRES) /* KEY0按下,发送一次数据 */
{
for (i = 0; i < 5; i++)
{
rs485buf[i] = cnt + i; /* 填充发送缓冲区 */
lcd_show_xnum(30 + i * 32, 170, rs485buf[i], 3, 16, 0X80, BLUE); /* 显示数据 */
}
rs485_send_data(rs485buf, 5); /* 发送5个字节 */
}
rs485_receive_data(rs485buf, &key);
if (key) /* 接收到有数据 */
{
if (key > 5)key = 5; /* 最大是5个数据. */
for (i = 0; i < key; i++)
{
lcd_show_xnum(30 + i * 32, 210, rs485buf[i], 3, 16, 0X80, BLUE); /* 显示数据 */
}
}
t++;
delay_ms(10);
if (t == 20)
{
LED0_TOGGLE(); /* LED0闪烁, 提示系统正在运行 */
t = 0;
cnt++;
lcd_show_xnum(30 + 48, 130, cnt, 3, 16, 0X80, BLUE); /* 显示数据 */
}
}
}