ubuntu18.04安装并运行ORB-SLAM2
查看版本号
lsb_release -a
换源
Ubuntu系统自带的源都是国外的网址,国内用户在使用的时候下载比较慢甚至无法获取,需要替换成国内的镜像源
-
备份源文件
sudo cp /etc/apt/sources.list /etc/apt/sources.list.old- 打开文件
sudo gedit /etc/apt/sources.list- 换源
打开清华镜像源仓库,选择Ubuntu版本并复制源,覆盖sources.list文件原来的内容。
ubuntu | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
- 更新源
sudo apt-get update安装第三方库
安装依赖项
sudo apt-get update
sudo apt-get install git gcc g++ vim make cmake
安装Pangolin
- 下载
安装Pangolin 0.6(稳定版),下载地址如下:
https://github.com/stevenlovegrove/Pangolin/archive/refs/tags/v0.6.zip
- 安装依赖项
sudo apt-get install libglew-dev libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt-get install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev libpng-dev
- 配置并编译
cd Pangolin
mkdir build && cd build
cmake -DCPP11_NO_BOOST=1 ..
make
sudo make install
- 验证
cd ../examples/HelloPangolin
mkdir build && cd build
cmake ..
make
./HelloPangolin
安装成功后会自动打开如下窗口

安装OpenCV3
- 下载
ORB-SLAM2要求至少 2.4.3,笔者采用3.4.5版本测试成功
具体下载版本可在下边仓库中寻找
Releases · opencv/opencv · GitHub
- 安装依赖项
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev
sudo apt-get install libavformat-dev libjpeg.dev libtiff5.dev
sudo apt-get install libswscale-dev libjasper-dev
sudo apt-get install libcanberra-gtk-module libcanberra-gtk3-module
#或者
sudo apt-get install libcanberra-gtk*
- 配置并编译
mkdir build && cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
#电脑性能差可去掉-j4,性能很好可增加数字(线程)
make -j4
sudo make install
opencv的初次编译过程比较缓慢,耐心等待即可
- 查看是否安装成功
查询OpenCV版本、库以及头文件目录的三个命令来确保上面的OpenCV安装步骤都正常:
pkg-config --modversion opencv
pkg-config --cflags opencv
pkg-config --libs opencv
安装Eigen3
Eigen3是一个纯头文件的库
直接安装:
sudo apt-get install libeigen3-dev
也可使用源码安装,源码下载地址如下:
GitCode - 开发者的代码家园
cd eigen3
mkdir build
cd build
cmake ..
make
sudo make install
安装后头文件的存放地址为:
/usr/local/include/eigen3/
为方便后期orb-slam2的编译运行,将该头文件移动位置到:
sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include
安装orb-slam2
- 下载
下载源文件并解压:
GitCode - 开发者的代码家园
在该文件夹下打开终端:
cd ORB_SLAM2
chmod +x build.sh
./build.sh
注意系统若硬件不行(线程少),将build.sh里的make -j(默认启用最大线程)修改为make,防止卡死,反之性能很好可增加数字(线程):如make -j4/j8/jx
编译过程中会遇到错误,因为源码中的一些文件源码中缺少头文件包含:
error: ’usleep’ was not declared in this scope
需要在报错的文件处加上头文件:
#include
具体这些缺失的文件有:
mono_euroc.cc
mono_kitti.cc
mono_tum.cc
rgbd_tum.cc
ViewerAR.cc
stereo_euroc.cc
stereo_kitti.cc
LocalMapping.cc
LoopClosing.cc
System.cc
Tracking.cc
Viewer.cc下载Tum数据集
Computer Vision Group - Dataset Download
建议下载如下版本:
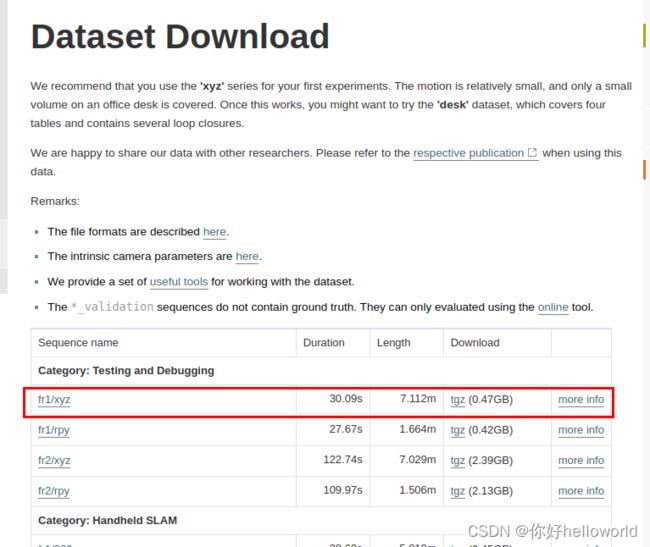
下载后解压文件,笔者解压后的文件路径为:![]()
运行orb-slam2
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM2.yaml ./data/rgbd_dataset_freiburg1_xyz/第一条命令为运行命令,后接数据集的路径

参考:
【精选】Ubuntu 18.04配置ORB-SLAM2和ORB-SLAM3运行环境+ROS实时运行ORB-SLAM2+SLAM相关库的安装_orbslam2和orbslam3共存_ZARD帧心的博客-CSDN博客