【3维视觉】一文带你学习网格细分Mesh Subdivision算法(Loop, Butterfly, Modified Butterfly, Catmull-Clark, Doo-Sabin)
0.引言
介绍了Loop, Butterfly, Modified Butterfly, Catmull-Clark, Doo-Sabin等网格细分算法。
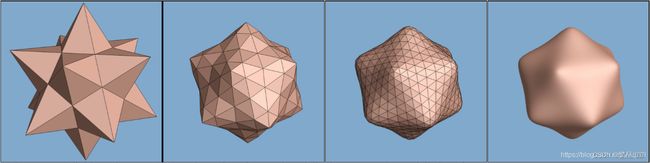
网格超分技术,换言之曲面细分,是指将一个模型的面合理的分成更多小的面,从而提升模型精度,提高渲染效果。经典的插值超分方法是通过一个组合更新(分裂面、添加顶点和/或插入边)和一个基于相邻顶点位置局部平均的顶点平滑来实现的。
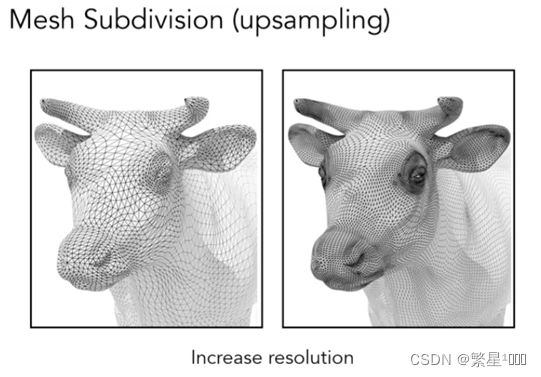
1、算法介绍
目前常见的网格主要是三角形网格(Triangle mesh)和四边形网格(Poly mesh),网格细分算法也可以分为只能处理三角形mesh(Loop, Butterfly, Modified Butterfly)的和只能处理四边形的(Catmull-Clark),最后是能处理任意形状mesh的( Doo-Sabin)
这些算法基本都是以Midpoint为基础,主要区别是对顶点位置的调整算法不同。

1.1 Loop细分(三角形网格)
Loop细分是Charles Loop在1987年在硕士论文Smooth subdivision surfaces based on triangles中提出的一种对三角网格的细分算法。
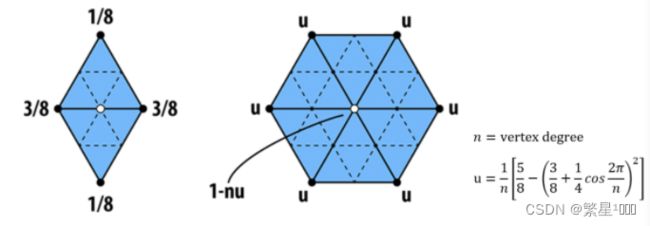
Loop细分是递归定义的,每一个三角形一分为四,对于新生成的顶点和旧顶点以不同的规则更新。
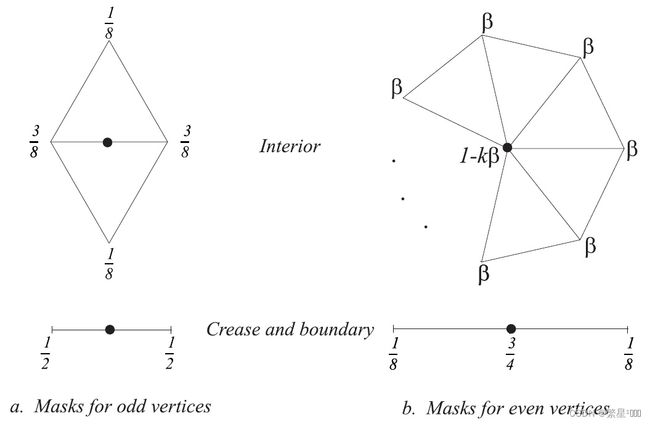
点的更新规则如下图:
左边为新生成的顶点(odd vertices),右边为旧顶点(even vertices)
odd:偶然出现的,新顶点就是偶然出现的嘛
even: 平常的,旧顶点
更复杂的,添加了对crease处理的Loop Subdivision
crease是什么
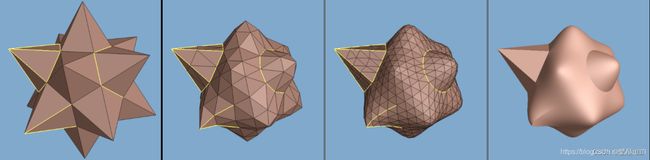
当说一条边是crease edge的时候,我们的意思其实是说这条边是sharp edge。为的是在Subdivision的时候能够保留一些锐利的部分,例如:
def subdivide_loop(vertices,
faces,
iterations=None):
"""
Subdivide a mesh by dividing each triangle into four triangles
and approximating their smoothed surface (loop subdivision).
This function is an array-based implementation of loop subdivision,
which avoids slow for loop and enables faster calculation.
Overall process:
1. Calculate odd vertices.
Assign a new odd vertex on each edge and
calculate the value for the boundary case and the interior case.
The value is calculated as follows.
v2
/ f0 \\ 0
v0--e--v1 / \\
\\f1 / v0--e--v1
v3
- interior case : 3:1 ratio of mean(v0,v1) and mean(v2,v3)
- boundary case : mean(v0,v1)
2. Calculate even vertices.
The new even vertices are calculated with the existing
vertices and their adjacent vertices.
1---2
/ \\/ \\ 0---1
0---v---3 / \\/ \\
\\ /\\/ b0---v---b1
k...4
- interior case : (1-kB):B ratio of v and k adjacencies
- boundary case : 3:1 ratio of v and mean(b0,b1)
3. Compose new faces with new vertices.
Parameters
------------
vertices : (n, 3) float
Vertices in space
faces : (m, 3) int
Indices of vertices which make up triangles
Returns
------------
vertices : (j, 3) float
Vertices in space
faces : (q, 3) int
Indices of vertices
iterations : int
Number of iterations to run subdivision
"""
try:
from itertools import zip_longest
except BaseException:
# python2
from itertools import izip_longest as zip_longest
if iterations is None:
iterations = 1
def _subdivide(vertices, faces):
# find the unique edges of our faces
edges, edges_face = faces_to_edges(
faces, return_index=True)
edges.sort(axis=1)
unique, inverse = grouping.unique_rows(edges)
# set interior edges if there are two edges and boundary if there is
# one.
edge_inter = np.sort(
grouping.group_rows(
edges,
require_count=2),
axis=1)
edge_bound = grouping.group_rows(edges, require_count=1)
# make sure that one edge is shared by only one or two faces.
if not len(edge_inter) * 2 + len(edge_bound) == len(edges):
# we have multiple bodies it's a party!
# edges shared by 2 faces are "connected"
# so this connected components operation is
# essentially identical to `face_adjacency`
faces_group = graph.connected_components(
edges_face[edge_inter])
if len(faces_group) == 1:
raise ValueError('Some edges are shared by more than 2 faces')
# collect a subdivided copy of each body
seq_verts = []
seq_faces = []
# keep track of vertex count as we go so
# we can do a single vstack at the end
count = 0
# loop through original face indexes
for f in faces_group:
# a lot of the complexity in this operation
# is computing vertex neighbors so we only
# want to pass forward the referenced vertices
# for this particular group of connected faces
unique, inverse = grouping.unique_bincount(
faces[f].reshape(-1), return_inverse=True)
# subdivide this subset of faces
cur_verts, cur_faces = _subdivide(
vertices=vertices[unique],
faces=inverse.reshape((-1, 3)))
# increment the face references to match
# the vertices when we stack them later
cur_faces += count
# increment the total vertex count
count += len(cur_verts)
# append to the sequence
seq_verts.append(cur_verts)
seq_faces.append(cur_faces)
# return results as clean (n, 3) arrays
return np.vstack(seq_verts), np.vstack(seq_faces)
# set interior, boundary mask for unique edges
edge_bound_mask = np.zeros(len(edges), dtype=bool)
edge_bound_mask[edge_bound] = True
edge_bound_mask = edge_bound_mask[unique]
edge_inter_mask = ~edge_bound_mask
# find the opposite face for each edge
edge_pair = np.zeros(len(edges)).astype(int)
edge_pair[edge_inter[:, 0]] = edge_inter[:, 1]
edge_pair[edge_inter[:, 1]] = edge_inter[:, 0]
opposite_face1 = edges_face[unique]
opposite_face2 = edges_face[edge_pair[unique]]
# set odd vertices to the middle of each edge (default as boundary
# case).
odd = vertices[edges[unique]].mean(axis=1)
# modify the odd vertices for the interior case
e = edges[unique[edge_inter_mask]]
e_v0 = vertices[e][:, 0]
e_v1 = vertices[e][:, 1]
e_f0 = faces[opposite_face1[edge_inter_mask]]
e_f1 = faces[opposite_face2[edge_inter_mask]]
e_v2_idx = e_f0[~(e_f0[:, :, None] == e[:, None, :]).any(-1)]
e_v3_idx = e_f1[~(e_f1[:, :, None] == e[:, None, :]).any(-1)]
e_v2 = vertices[e_v2_idx]
e_v3 = vertices[e_v3_idx]
# simplified from:
# # 3 / 8 * (e_v0 + e_v1) + 1 / 8 * (e_v2 + e_v3)
odd[edge_inter_mask] = 0.375 * e_v0 + \
0.375 * e_v1 + e_v2 / 8.0 + e_v3 / 8.0
# find vertex neighbors of each vertex
neighbors = graph.neighbors(
edges=edges[unique],
max_index=len(vertices))
# convert list type of array into a fixed-shaped numpy array (set -1 to
# empties)
neighbors = np.array(list(zip_longest(*neighbors, fillvalue=-1))).T
# if the neighbor has -1 index, its point is (0, 0, 0), so that
# it is not included in the summation of neighbors when calculating the
# even
vertices_ = np.vstack([vertices, [0.0, 0.0, 0.0]])
# number of neighbors
k = (neighbors + 1).astype(bool).sum(axis=1)
# calculate even vertices for the interior case
even = np.zeros_like(vertices)
# beta = 1 / k * (5 / 8 - (3 / 8 + 1 / 4 * np.cos(2 * np.pi / k)) ** 2)
# simplified with sympy.parse_expr('...').simplify()
beta = (40.0 - (2.0 * np.cos(2 * np.pi / k) + 3)**2) / (64 * k)
even = beta[:, None] * vertices_[neighbors].sum(1) \
+ (1 - k[:, None] * beta[:, None]) * vertices
# calculate even vertices for the boundary case
if edge_bound_mask.any():
# boundary vertices from boundary edges
vrt_bound_mask = np.zeros(len(vertices), dtype=bool)
vrt_bound_mask[np.unique(edges[unique][~edge_inter_mask])] = True
# one boundary vertex has two neighbor boundary vertices (set
# others as -1)
boundary_neighbors = neighbors[vrt_bound_mask]
boundary_neighbors[~vrt_bound_mask[neighbors[vrt_bound_mask]]] = -1
even[vrt_bound_mask] = (vertices_[boundary_neighbors].sum(axis=1) / 8.0 +
(3.0 / 4.0) * vertices[vrt_bound_mask])
# the new faces with odd vertices
odd_idx = inverse.reshape((-1, 3)) + len(vertices)
new_faces = np.column_stack([
faces[:, 0],
odd_idx[:, 0],
odd_idx[:, 2],
odd_idx[:, 0],
faces[:, 1],
odd_idx[:, 1],
odd_idx[:, 2],
odd_idx[:, 1],
faces[:, 2],
odd_idx[:, 0],
odd_idx[:, 1],
odd_idx[:, 2]]).reshape((-1, 3))
# stack the new even vertices and odd vertices
new_vertices = np.vstack((even, odd))
return new_vertices, new_faces
for _ in range(iterations):
vertices, faces = _subdivide(vertices, faces)
if tol.strict or True:
assert np.isfinite(vertices).all()
assert np.isfinite(faces).all()
# should raise if faces are malformed
assert np.isfinite(vertices[faces]).all()
# none of the faces returned should be degenerate
# i.e. every face should have 3 unique vertices
assert (faces[:, 1:] != faces[:, :1]).all()
return vertices, faces
1.2 Butterfly
蝴蝶算法是一种常用的插值细分算法,由NIRA DYN and DAVID LEVIN (Tel-Aviv University) and JOHN A. GREGORY (Brunei University)在论文A Butterfly Subdivision Scheme for Surface Interpolation with Tension Control 提出。
Butterfly 只对新插入的点处理,对新插入的顶点分了两种情况:
- 内部点:位于内部边的点
- 内部边的两个端点度都为6时
- 内部边的一个端点度为6时
- 内部边的两个端点度都不为6时 - 边界点:位于边界边的点

注意,Butterfly模板假设有一个规则的邻域,即,要处理的边[a, b]的顶点a和b都恰好有6个邻域。此外,Butterfly要求表面是局部流形,即模板中的每条边至少有一个面连接到它(边界边),最多有两个面(内部边)。
1.3 Modified butterfly
Denis Zoriny, Peter Schr ¨odery, Wim Sweldens在论文Interpolating Subdivision for Meshes with Arbitrary Topology中提出了改进的蝴蝶算法,可以在任意的三角网格上生成G1连续的细分曲面。对Butterfly方案的主要修改在于处理价不等于6的点,它克服了butterfly方案在这些情况下表现出的尖点状伪影。
新插入的点(即所谓奇点)都在已有三角形的边上。对于它们的坐标点的计算,将分以下几种情况:
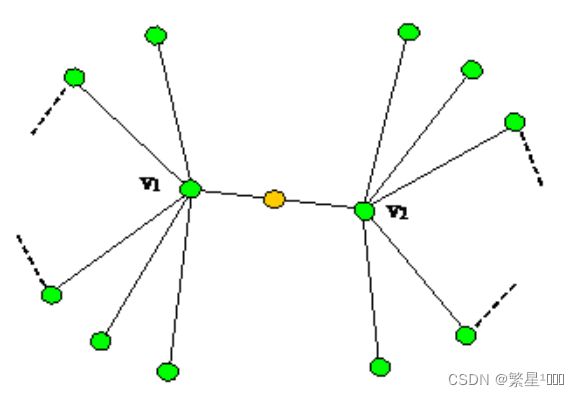
3.1奇点所在边的两个端点的度均为6

如上图所示,中间黄色点为插入的奇点,它的坐标值通过周围八个点(绿色)的坐标值加权平均得到。并且周围的点按权重不同可分为三类,各自权重如下:a = 1/2,b = 1/8,c = -1/16
3.2 奇点所在边的两个端点中一个端点的度为6,另一个不为6

如图4所示,奇点所在的边的两个端点中,点v的度不为6,点e0的度为6,则奇点的坐标值要根据点v及v的所有相邻点(绿色)的坐标加权得到。
- v点的权重:v = 3/4
- 剩下1/4的权重根据v点周围点的数量分配给周围点(e0也是v的周围点)
假设点v共有n个邻点,则各邻结点的权值可根据n值的不同分别计算:
n = 3时:e0 = 5/12,e1 = e2 = -1/12;
n = 4时:e0 = 3/8,e1 = 0,e2 = -1/8,e3 = 0;
n ≥ 5时: e j = ( 1 / 4 + c o s ( 2 π ∗ j / n ) + 1 / 2 ∗ c o s ( 4 π ∗ j / n ) ) / n e_j = (1/4 + cos(2\pi*j/n) + 1/2 * cos(4\pi*j/n))/n ej=(1/4+cos(2π∗j/n)+1/2∗cos(4π∗j/n))/n,其中 j = 0 , 1 , … , n − 1 j = 0,1,…,n-1 j=0,1,…,n−1。
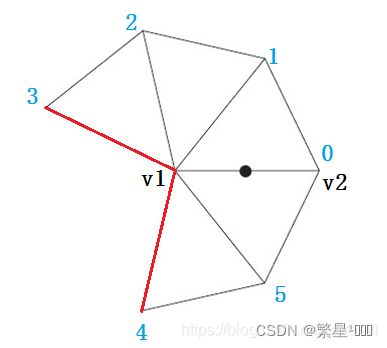
注意特殊情况:如果处理的模型是非闭合的,即处理的模型有开口。那么当寻找v周围的顶点并保存时,应该注意存储顶点的顺序问题,如下图所示情况:
当前处理的边是(v1,v2),假设一向上找周围顶点,找到边(v1,3)遇到边界边停止,想要找剩下的顶点就需要从(v1,v2)向下寻找,找到点的顺序是5,4.在最终存储时需要将向下寻找时找到的点倒序存到123后面才能保证顺序正确。
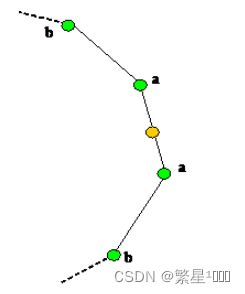
3.3 当奇点所在边的两个端点的度均不为6时(如图5)
先以v1为中心,按前述(3.2)情况中的方法计算出奇点的坐标,记为(x1,y1,z1),再以v2为中心同样计算出奇点的坐标,记为(x2,y2,z2),然后对两组坐标取平均值,得到奇点的坐标。
3.4 奇点所在边是边界时采用四点法。
当网格不闭合时存在这种情况,此时参与计算的各点的权值取值如下:
a = 9/16,b = -1/16
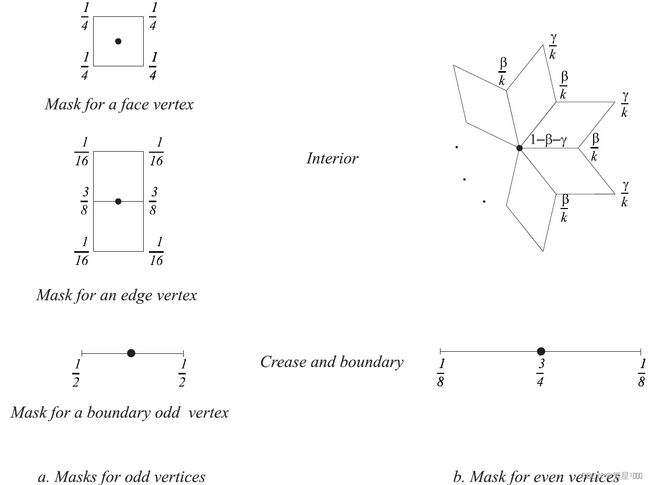
1.4 Catmull-Clark细分(四边形网格)
Catmull-Clark细分是Edwin CatMull和Jin Clark在1978年提出的一种可以对任意拓扑的网格进行细分的一种算法,是递归定义的,在每一次递归中:
分如下5种情况处理点:
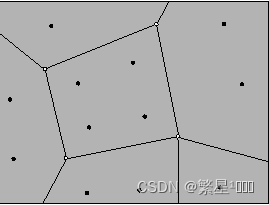
1.5 Doo-Sabin细分
Doo-Sabin细分是Dainel Doo和Malcolm Sabin在1978年在论文Behaviour of recursive division surfaces near extraordinary points提出的一种可以对任意拓扑的网格进行细分的一种算法,是递归定义的。
原来的顶点变面(度为几,就是几边形)
边也变面
原来的面也变为新面

在每一次递归中:
-
计算面的中心点和边的中心点,对于每一个点P,计算一个新的点P’, 是原顶点,相邻的边的中心点和面的中心点的平均值。
-
对于每一个面,连接面内的新点生成新的面
-
对于每一个点,连接点周围的新点生成新的面

-
对于每一条边,连接边相邻的新点生成新的面
2、对比
Loop只能用于三角形网格,Catmull-Clark可以运用于任意拓扑的网格
Doo-Sabin的计算效率不如Catmull-Clark
在3D计算机图形学中,Doo-Sabin细分曲面是一种基于双二次均匀B样条推广的细分曲面,而Catmull-Clark基于广义双立方均匀B样条。
评估
Doo-Sabin曲面以递归方式定义。与所有细分过程一样,每次细化迭代都按照给定的过程,将当前网格替换为“更平滑”、更精细的网格。经过多次迭代后,曲面将逐渐收敛到光滑的极限曲面上。
就像Catmull-Clark曲面一样,Doo-Sabin极限曲面也可以通过Jos Stam的技术直接评估,而无需任何递归细化。然而,该解决方案的计算效率不如 Catmull-Clark 曲面,因为 Doo-Sabin 细分矩阵(通常)不可对角化。
3、参考资料
[1] Mesh-Subdivision(Github)
[2] loop曲面细分算法c++实现
[3] Doo-sabin曲面
[4] 细分曲面Catmull-Clark Subdivision算法
[5]【图形学实验】Loop Subdivision与Modified Butterfly Subdivision
[6] 改进的蝴蝶算法详细介绍
[7] 三维网格细分算法(Catmull-Clark subdivision & Loop subdivision)附源码