新能源汽车动力域:MCU HIL仿真测试
在这个注重环境保护、解决能源危机、智能网联化的时代,汽车产业成为了时代的关注焦点。在国家政策的扶持下,汽车产业不断向节能环保的方向转型推进。现如今,新能源汽车已经与我们的生活密不可分,依托新能源汽车而出现的配套产业也正不断完善。三电系统作为新能源汽车的核心组件,对其控制器进行HIL测试验证已然成为了新能源汽车开发流程中不可或缺的一环。
传统的实车测试技术存在测试周期长、测试时间滞后等缺点,导致控制器开发周期延长。为缩短开发周期,使控制器功能更好地满足使用要求,HIL(Hardware-in-the-Loop)仿真测试技术应运而生,并逐步替代传统实车测试技术,成为了汽车测试领域的主流。HIL测试技术可以在软、硬件开发前期快速验证应用层算法功能及基础软件质量,同时实现极限工况验证和复杂场景复现。电机控制器信号级闭环HIL测试以其低成本、高安全性及高灵活度等特性,受到广泛青睐。
东信创智已经具备针对新能源三电控制器和域控制器相关测试的一体化服务团队和技术能力,如针对电池管理系统的BMS HIL测试、针对电机控制器的MCU HIL、针对整车控制器的VCU HIL、针对转向制动底盘域控制器的EPS/EBS HIL以及多种控制器联合HIL测试等。本文是继VCU HIL与BMS HIL两大控制器仿真测试技术介绍后,针对电机控制器MCU HIL测试的原理叙述。

新能源汽车动力域三电HIL仿真测试
电机控制器整体简介
电机控制器MCU(Motor Control Unit),作为新能源汽车驱动系统的核心电子控制元件,拥有将高压直流电能转化为高压交流电驱动电机,实现车辆行驶的作用。MCU主要由控制板和驱动板2个部分组成。控制板包括CPU控制模块、电源模块、数模通道模块、旋变模块和硬件保护电路模块;驱动电路主要是PWM驱动电路模块。MCU控制器接收VCU整车控制器的指令,运行电机控制算法,发出控制信号给逆变器,高频控制IGBT/MOSFET半导体功率器件通断,输出三相交流电,从而控制电机转动;传感器负责电机本体和逆变器反馈信号的采样,用于MCU控制板中控制算法的闭环。
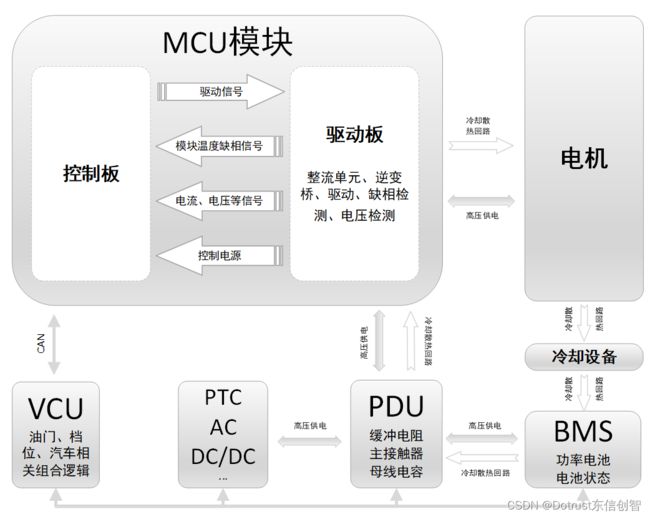
MCU 功能架构图
2.1 MCU功能
1)上下高压电控制功能:整车处于低压或者休眠状态下,VCU的硬件根据KL15 硬线信号判断是否有必要进行上高压以及判断整车当前条件是否满足上高压条件,MCU在接收到VCU的上电请求时,MCU会检测电路状态,无故障后进行上电并发送相关报文给VCU;整车处于高压状态下,VCU根据KL15硬线信号判断下高压,请求MCU下电并响应VCU的放电请求进行放电。

MCU上下高压电过程
2)驱动控制功能:MCU控制板根据VCU的需求转矩指令计算输出PWM信号,控制驱动板把直流高压转化为三相交流高压驱动电机运行,从而满足驾驶员的行驶要求。
3)CAN通讯功能:MCU通过CAN总线可以实现与整车电子电气部件进行通讯,以满足实时的状态监控、指令响应、信息交互和动作执行。
4)放电功能:BMS断开主接触器,VCU请求MCU进行主动放电动作,MCU执行主动放电操作,XXs内将母线电压泄放至60V以下。
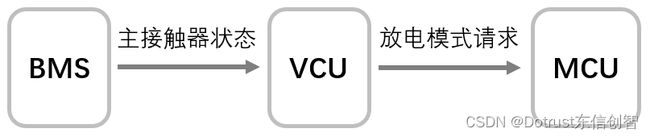
MCU放电过程
5)故障保护功能:MCU具备对电机、逆变器、旋转变压器等电机驱动系统中的电子电气模块的实时监控功能,当MCU检测到发生直流母线电压过压故障、直流母线电流过流故障、直流母线电压欠压故障、电机控制器温度故障、电机温度故障、超速故障、CAN通讯故障、IGBT故障等,会采取相应的保护措施。
三、MCU HIL仿真测试系统
3.1 MCU HIL测试系统三种解决方案
MCU HIL测试可以分为三个等级:信号级、功率级和机械级。
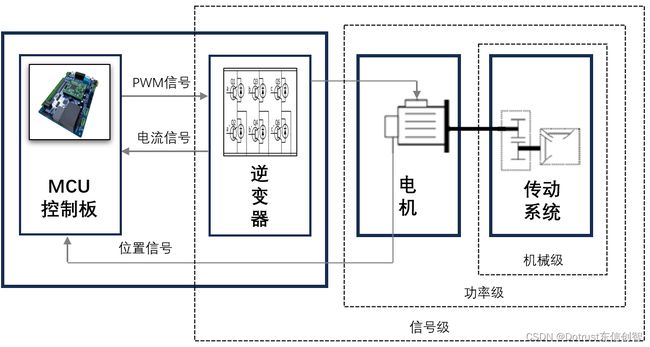
上图虚线框表示了三个等级下被仿真的对象或系统。
信号级MCU HIL测试系统中,只有MCU是真实的,其余被控对象例如逆变器、电机、旋转变压器及传动系统均为搭建的仿真模型,因此可以方便快速地调整被控对象模型参数。测试过程中不会出现比较高的电压和电流,因此可以在无功率的安全情况下测试MCU的功能。
功率级MCU HIL测试系统中,MCU和逆变器是真实的,电机、旋转变压器以及传动系统均为搭建的仿真模型,还需要真实的电子负载进行吸收能量。相比于信号级的测试,功率级测试过程中会出现比较大的电压和电流,危险系数较高。
机械级MCU HIL测试系统中,MCU、逆变器和电机是真实的,旋转变压器及传动系统均为搭建的仿真模型。机械级测试系统可以进行对电机驱动系统最全面的测试,需要搭建机械测试台架,对安全性要求很高,成本很高。
显然,对MCU进行功能测试时,信号级仿真系统的安全性、系统搭建容易度、测试成本等,较功率级和机械级MCU HIL测试系统都有突出的优势,那么小编就以信号级MCU HIL测试系统为例,来说说MCU功能测试的基本原理。
3.2 MCU HIL信号级测试系统简介
本文介绍的MCU HIL仿真测试基于Vector平台,HIL测试系统通过软硬件仿真的方式,为被测控制器提供正常运行所需的供电、总线通讯、传感器输入、被测对象输出测量等资源,使被测控制器在实验室环境且无需依赖真实部件的情况下运行并进行测试验证。MCU控制板作为电机控制器的控制算法核心,其HIL测试系统使用数学模型来表示整个系统的物理状态并使用I/O板卡连接到MCU控制板,从而实现对MCU控制板的代码和硬件电路测试。在MCU控制板信号级闭环HIL测试中,仅MCU控制板使用真实硬件,其余部件均通过数学模型和硬件I/O进行模拟。根据上述介绍,需要进行仿真的数学模型主要有电机模型、逆变器模型和传感器模型。
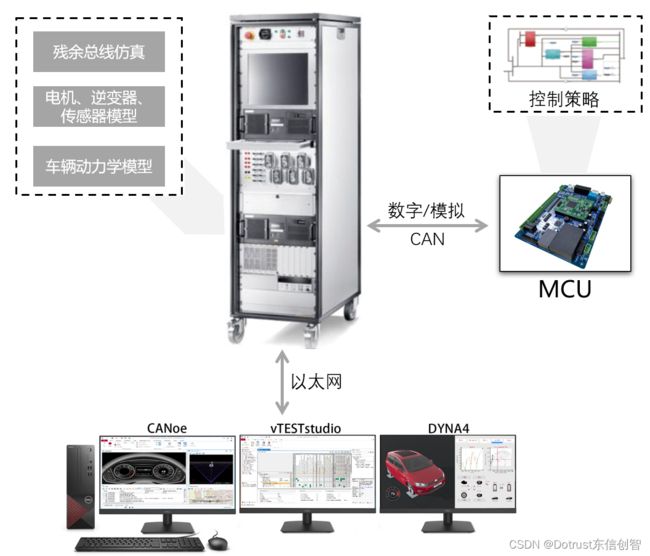
MCU HIL信号级测试方案
上位机与机柜通过以太网连接,在上位机中运行试验管理软件以维持测试的进行,具体流程为:在DYNA4软件中搭建被测对象的整车动力学模型,经编译后下载到VT6000实时机中;将电机模型编译后生成的文件使用FPGA Manager部署于VT5838的FPGA芯片中运行;随后,通过试验管理软件CANoe控制整车模型在实时系统中的运行情况,也可通过自动化测试软件vTESTstudio搭建自动化测试条例,实现测试环节的自动化。
3.3 MCU HIL测试软件平台设计
3.3.1 软件平台模型搭建
MCU控制器需要采集电流、电压、转速、位置、温度等信号, MCU通过CAN总线与仿真的虚拟节点进行总线数据交互,故在Simulink里搭建电机相关模型,共分为4个部分:
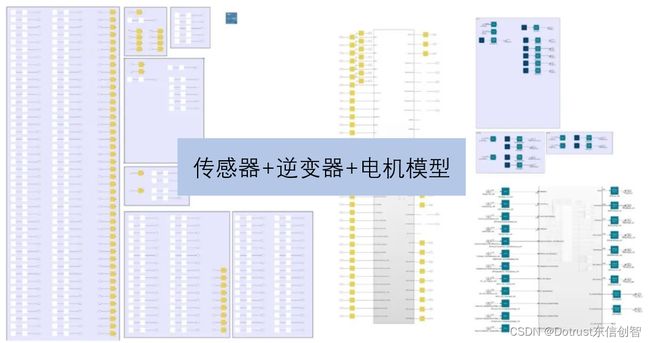
Simulink中搭建“传感器+逆变器+电机”模型
第一部分是传感器模型,主要目的是反馈电机转子温度、工作电流、电压、当前转速、位置等信息。
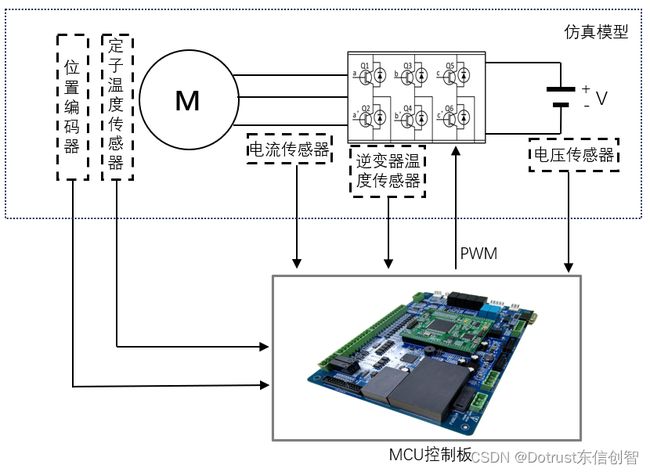
电机传感器与MCU控制板的关系示意
第二部分是逆变器模型,在PMSM电机驱动系统中,逆变器负责将动力电池输出的直流电压转换为定频定压或调频调压的交流电压,进而提供给驱动电机。
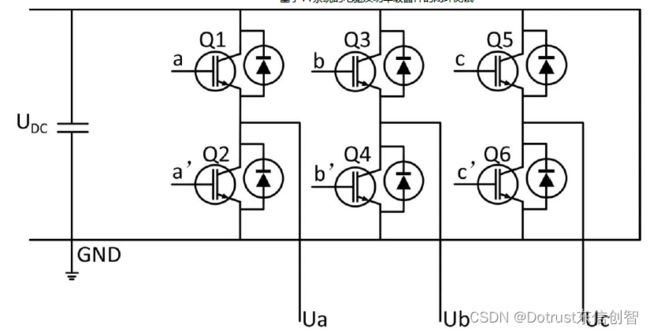
典型逆变器拓扑图
第三部分是电机模型,主要作用是根据编码器模型的信号判断转子的位置和速度,从而计算出电机当前电流、输出力矩等信息,并反馈给MCU控制器;MCU控制器根据当前电机模型反馈信息,再次发送目标请求信号,给到电机模型形成电机控制闭环。
第四部分是CAN通讯输入输出控制部分,主要作用是实现MCU与虚拟节点CAN信号关联,并能实现手动修改信号值,CAN通讯信息包含转速信号、母线电压信号、逆变器的温度信号等。
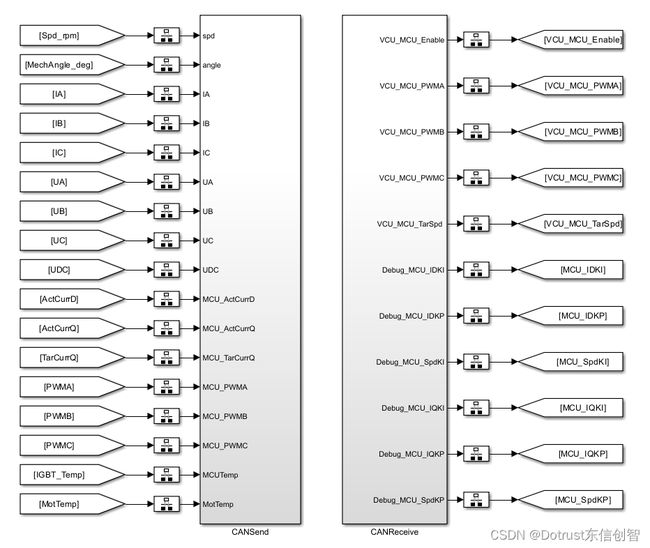
CAN通讯输入输出模块
3.3.2基于VT测试平台软件介绍
东信创智MCU HIL测试方案所需的软件环境主要有试验管理软件CANoe、自动化测试软件vTestStudio及车辆动力学软件DYNA4, CANoe、vTestStudio、DYNA4之间可以无缝衔接,并将CANoe中的工程参数同步到vTestStudio,便于调用各种变量以及参数进行测试用例的编写。使用MATLAB/Simulink和DSP Builder搭建VT5838 FPGA模型,编译后部署到VT5838的FPGA芯片中运行。
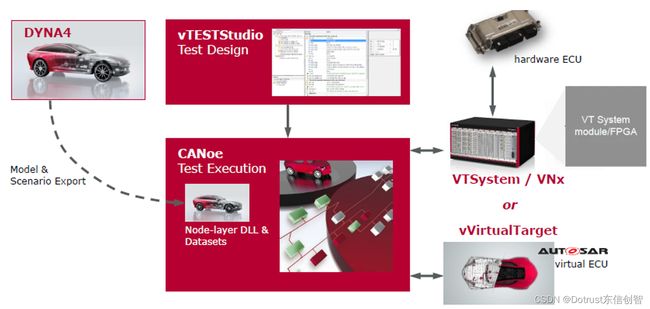

MCU HIL工具链
四、MCU HIL可实现功能
- 能够提供MCU运行时需要的整车输入信号以及向MCU控制器供电等,并实时运行整车仿真模型来模拟整车运行环境。
- 整车系统级功能验证测试、电子零部件级功能验证测试。
- 验证测试MCU电控单元故障自诊断策略:电气故障主要包括开路、对地短路、对电源短路等;网络故障主要包括Bus off、校验CRC错误、Rolling counter错误等。
- 模拟整车CAN网络通讯,实现与其它控制器例如 BMS、VCU和辅助系统等CAN节点收发功能,并能通过模拟的CAN总线向MCU发送关键数据。
- 极限工况仿真测试:对实车上无法覆盖到的测试工况、对测试人员生命安全有威胁的测试工况以及极端天气条件下的测试工况进行仿真验证。
- 复杂故障工况模拟和快速重现:对偶发的控制器故障工况进行快速模拟重现和对复杂的故障工况进行模拟测试。
DOTRUST
VX|dotrustech
联系我们|[email protected]