传感器探测
来源:http://worthpen.top/#/home/blog?blog=pot-blog28.md
目录
- 1 不同的导引方式
-
- 1.1 雷达导引
- 1.2 电视导引
- 1.3 红外导引
- 1.4 激光雷达导引
- 1.5 指令导引
- 1.6 惯性导引
- 1.7 驾束导引
- 1.8 光电导引头
- 2 雷达测角
-
- 2.1 天线的方向性
- 2.2 角度分辨力
- 3 雷达工作模式及其种类
-
- 3.1 机扫雷达
- 3.2 相控阵雷达
- 3.3 合成孔径雷达(SAR)
- 3.4 连续波雷达
- 3.5 脉冲雷达
- 3.6 超宽带雷达
- 6 其他
-
- 6.1 跟踪门的作用
- 6.2 目指信息
- 6.3 分数带宽
- 6.4 相参信号
- 6.5 精度的定义
- 6.6 欠定接受
- 6.7 盲信号分离
- 6.8 极化
- 6.9 盲源分离和多重信号分类的区别
- 6.10 机载雷达抗干扰思路主要包括三方面:
- 6.11 主瓣干扰和旁瓣干扰的定义
- 6.12 RCS
- 6.13 距离-多普勒算法
- 6.14 信号双谱
- 6.15 快时间和慢时间
- 6.16 希尔伯特变换
- 6.17 实信号的复信号
- 6.18 傅里叶变换相关
- 6.19 视频信号
- 6.20 测速和测距能力由于盲速的原因存在冲突
- 6.20 dB即分贝(decibel)
1 不同的导引方式
1.1 雷达导引
雷达能得到目标的距离, 角度, 和粗略的轮廓等信息, 可能是一个圆形的轮廓. 频率越高, 波长越短, 越容易被吸收衰减, 越不容易发生衍射. 角度分辨力越高。
一般雷达频段: 30-30G(Hz)
毫米波雷达频段: 30G-300G(Hz)
可见光的频段: 380T-750THz
1.2 电视导引
通过光学摄像头拍摄环境, 识别目标进行跟踪制导
1.3 红外导引
红外制导空空导弹的最佳探测距离在20公里左右。最大攻击距离差不多也是这个距离。最佳攻击距离在1公里以上,10公里以下。
(1) 红外成像导引
(2) 红外点源(非成像)导引
1.4 激光雷达导引
与雷达导引相同, 使用激光波段,具有较高分辨率. 激光相比于雷达波束更直, 精度更高. 但其抗干扰能力较差, 无法在雨雪雾霾天,沙尘暴等恶劣天气中使用. 目前最远1公里。
1.5 指令导引
就是制导站根据目标位置和导弹位置, 生成指令, 发送到导弹. 这种方式导弹上不需要进行探测.
红外指令制导: 导弹通过发射红外信号, 使制导站得到导弹位置
1.6 惯性导引
预设目标位置信息, 通过惯性测量装置测出导弹的当前位置参数,形成制导指令进行控制。
1.7 驾束导引
接收器位于导弹上, 发射器对准目标, 发射后, 导弹沿着由目标反射而来的光束或波束飞行.
驾束导引和半主动雷达导引的区别是, 驾束导引只沿着角度跟踪波束, 而半主动雷达导引会根据波束特征计算目标的距离, 速度等特征. 这使得半主动雷达导引可以使用较宽的波束. 从他们的区别可以得到, 被动雷达导引和红外非成像导引相当于没有发射器的驾束导引
(1) 激光驾束导引
(2) 雷达驾束导引
1.8 光电导引头
这是一种用于导航或控制系统的光学传感器,通常使用红外线或可见光谱范围内的光线来检测其周围环境。是红外导引和电视导引的总称。
2 雷达测角
2.1 天线的方向性
天线具有方向性,天线电路中的电流和空气中的电磁波是对应的。天线中的电流会产生特定方向的电磁波,特定方向的电池波也会在天线中产生电流。天线中的电流是没有方向性的,都是高频率的交流电,方向性指的是空气中的电磁波方向。方向性是双向的,从发出的角度看,固定角度的某个天线,对于不同角度会辐射不同的强度;从接收的角度看,来源于某个角度的回波,对于固定角度的某个天线,会在天线中产生不同强度的电流。
2.2 角度分辨力
雷达的角度分辨力和其波束的方向图(不同角度的接受信号强度)的半功率点有关. 天线的半径越大, 其半功率点越窄, 则分辨力越高. 对于线阵列雷达, 其半径为阵元数与阵元间隔的乘积.
分辨力体现的是分辨二个目标的情况,高的分辨力可以清晰地刻画物体的边界;而测量精度反映是一个目标的测量值与真实值之间的误差关系。其次,精度与分辨率之间也是有关联的:参数分辨率越高、信噪比越高,则参数的测量精度越高。
3 雷达工作模式及其种类
3.1 机扫雷达
机扫雷达是不停旋转的,不会在侦收时间停止旋转。由于不停止旋转,那么接收回波的时候就会出现回波不会从方向图的最大强度的方向进入雷达,而回波在发出的时候是从方向图的最大强度的方向发出的。这并不影响测距性能。因为测距不依赖于回波强度,只是探测距离会缩短。
但是,由于机扫雷达基于振幅法进行测角,因此振幅缩小会导致测角的误差,不过这是可以忽略的。最后,在完成一次扫描周期后,我们得到方向图。对于有目标的角度,强度最大。然后由于波束的宽度,导致在一定范围内仍存在一定的强度,最后在较远距离强度为0.
3.2 相控阵雷达
相控阵雷达具有传感器阵列. 传感器阵列不同于多源信息融合中的多个传感器,传感器阵列特指按照一定规律排列的雷达传感器阵列,其接受的信息为同类信息,通过不同雷达间的位置关系和接受信号确定目标的角度。
扫描原理:发出信号通过输入相同频率的电磁波,改变不同天线发出的信号的相位差,实现不同角度的信号发射。此时发出的信号对于不同角度均具有一定的幅值,不过定义半功率点为波束指向。
侦收原理:大部分场景使用非全向波束发射。每个天线均全向接收,然后通过相位法直接计算出来波角度。当然,由于是间隔的发送波束,这和机扫雷达相同,因此也可以使用振幅法测角。
3.3 合成孔径雷达(SAR)
SAR具有很高的角度分辨力. 它通过不停的转移位置, 在不同位置上对同一点进行照射, 并接受回波信号, 等效一个具有多个阵元的线阵雷达或者说一个超大孔径的雷达, 因此, SAR叫做合成孔径雷达.
3.4 连续波雷达
连续发射电磁波的雷达称为连续波 雷达。
3.5 脉冲雷达
能够辐射持续时间较短的高频脉冲
3.6 超宽带雷达
分数带宽(FBW)大于0.25的雷达。作用距离近。
6 其他
6.1 跟踪门的作用
雷达扫描下一个预测的范围,在该范围内接受信号可以较小扫描压力。如果该范围内没有目标,则判断为丢失目标;如果有,就继续跟踪,形成航迹。
6.2 目指信息
目标指示信息,就是目标的位置等。
6.3 分数带宽
(最高频率-最低频率)/中心频率
6.4 相参信号
相参是指脉冲之间的初始相位具有确定性(第一个脉冲的初相可能是随机的,但后序的脉冲和第一个脉冲之间的相位具有确定性,这是提取多普勒信息的基础。第一个脉冲初始相位的随机性并不影响后序的信号检测,因为检测前是要进行取模的),非相参是指脉冲之间的初始相位都是随机的,彼此不相关。
现代雷达技术已经可以实现完全的相参信号。
6.5 精度的定义
https://blog.csdn.net/naozhuo0615/article/details/102702637
6.6 欠定接受
欠定接受指的是在盲信号分离过程中,观测的数量小于源信号。
6.7 盲信号分离
盲信号分离指的是从多个观测(对应多个传感器或者时间序列结果)到的混合信号(对应多个目标、干扰、噪声的混合信号)中分析出源信号(产生混合信号的各个信号,源信号包括干扰和噪声,并不全是感兴趣信号)
6.8 极化
线极化可以分解为两个旋向相反的圆极化波,因此圆极化天线可以接收任意极化波。
6.9 盲源分离和多重信号分类的区别
多重信号分类是通过雷达阵列接收的信号得到噪声子空间的向量表示,再通过求噪声子空间的正交向量求出信号子空间的DOA参数。盲源分离指的是将雷达阵列接收到的所有信号进行分离,分离出源信号,再得到DOA参数。盲源分离侧重于将信号分离,信号分离后当然可以测到DOA,但是这与多重信号分类求DOA的原理不同,多重信号分类求DOA不需要将信号分离,直接就可以求出DOA。
6.10 机载雷达抗干扰思路主要包括三方面:
(1) 采用低截获探测方式,使电子战设备无法有效截获雷达信号,或截获后无法识别出雷达信号为威胁辐射源,从而不触发干扰。该思路类似于穿上透明战袍,让对方难以对自身进行干扰。
(2) 主动避开干扰,或主动诱骗干扰机,减少干扰或使干扰有利于抑制。该思路类似于绕开对方或者让对方走到其他地方,避开对方。
(3) 在已经受到干扰情况下,利用空、时、频、极化、能量、波形、一维像等多维度上目标回波和干扰信号的差异,对干扰进行抑制。
6.11 主瓣干扰和旁瓣干扰的定义
主瓣干扰就是将干扰信号作为主瓣发送至被干扰雷达,让其无法分辨真实目标还是假目标。而旁瓣干扰是将干扰信号作为旁瓣发送至被干扰雷达,而旁瓣干扰需要此时具有一个主瓣,主瓣可以是另一处位置的假目标产生。
6.12 RCS
对于RCS,有人通俗解释为,它表示飞机对雷达波的反射能力相当于多少平方米面积的垂直金属平板。RCS并不是一个表征面积的参数,而是表征一个物体反射能力的参数,体现物体是否更容易被雷达发现,而不是体现物体是不是更大。RCS只是与面积具有一定的关系,面积越大,RCS越大。但是,RCS必然比面积小,因为任何物体不可能反射所有入射到这个物体上的电磁波。同时,RCS只是总功率比功率密度的数值的比,不可能带有形状信息。
6.13 距离-多普勒算法
距离多普勒算法是SAR雷达使用的成像方法,可以将SAR雷达接收到的多个点的雷达信号转换成方位-距离图,目前感觉和多普勒无关。
6.14 信号双谱
是一种随机变量的处理方法,为随机变量的三阶累积量(自变量为时间)的傅里叶变换(自变量为频率)。可以将一维时域信号变为一种二维信号。双谱相对于时频谱的好处在于可以保留相位信息。
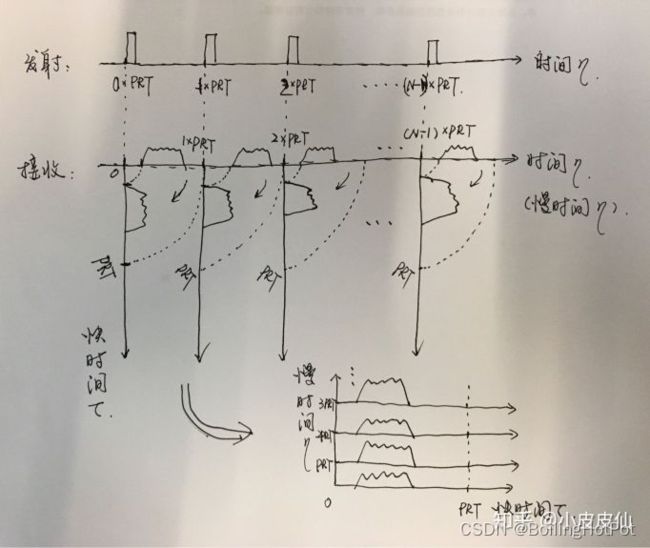
6.15 快时间和慢时间
6.16 希尔伯特变换
希尔伯特变换是一种实信号到实信号的变换;
6.17 实信号的复信号
实值函数的傅里叶变换必是共轭对称的。实际上的信号都是实信号,但是为了方便处理,只需要共轭对称的信号的一半(即实值函数需要两个共轭对称的值来表示一个谐波,而复值函数只需要一个值就可以表示一个谐波。),信号处理一般使用复信号(注意:复值函数的傅里叶变换也可能在负半轴有值,但是其不一定是共轭对称。)。可以使用希尔伯特变换的结果作为虚部,原信号作为实部,构建解析信号,来代替原信号,这里的解析信号就是复信号。这样可以实现单边信号。
需要注意的是,在构建过程中,并不是对实部求arccos得到角度后,使用角度构建exp的复信号。而是取希尔伯特变换的结果作为虚部构建复信号。因此,不会出现arccos导致的两个结果的问题。
可以通过对实值函数的傅里叶变换只取正半轴得到其复值函数。因为实值函数的负半轴的作用在于抵消虚部,当只取正半轴时,得到的值同时具有实部和虚部,这时候取实部,就不需要抵消了。但是由于只有单边的强度,因此幅值会改变。
6.18 傅里叶变换相关
傅里叶变换通常使用复信号进行傅里叶变换。这是因为根据傅里叶变换的性质,实值函数的频谱是关于f=0轴共轭对称,也就是说,实值函数的频域表示是存在冗余的,因此为了信号处理方便,去掉频域的负半平面,这样产生的频谱所对应的时域信号就是一个复信号。这个复信号构建可以看21。
需要注意的是,即使使用复信号进行傅里叶变换,产生的频域仍有可能为复数,只不过其只在正半轴有值,复数代表了当前频率的相位。e^jwt的傅里叶变换比较特殊,其频域为实数。此外,FFT是带有误差的,可能导致matlab内的结果存在复数。当忽略频域的相位时,频域的幅值就是每个频率对应的复数的模,在matlab中使用abs得到。
傅里叶变换的横轴实际上是角速度,而不是频率。但是,日常使用中使用频率来表示横轴,只需要角速度除2pi即可得到频率
6.19 视频信号
雷达信号的处理流程为:先混频到中频,然后进行放大和滤波,再进行提取包络处理,处理完得到的就是视频信号。视频信号就是中频信号放大后的包络。
同时,基带信号是未经载波调制的信号。视频信号是解调之后的信号。理论上,两者完全一样。
称之为视频信号的原因:检波器输出的信号正比于信号包络的输出电压,该信号类似于早期电视中的图像信号(图像信号体现在显像管上绘出图像的电子束的强度)。所以,检波器输出的信号又称为视频信号。
6.20 测速和测距能力由于盲速的原因存在冲突
6.20 dB即分贝(decibel)
经常用来表示两个信号比值的大小,不用来表示绝对值(与相对值对应,而不是数学上的绝对值)的大小。dB在表示功率的时候用10lg(X),在表示电压或者电流的时候用20lg(X)