MIMO雷达(TI文档)
MIMO雷达是提高毫米波雷达角度分辨率(空间分辨率)的关键技术。这里介绍MIMO雷达的基本准则和不同设计的可能性。还简要讨论了在TI毫米波产品线上实现MIMO雷达的路径。
1.简介
术语单输入多输出(SIMO)雷达指的是雷达有单个发射(TX)和多个接收(RX)天线。一个SIMO雷达的角度分辨率以来RX天线的数量。比如,有4个RX天线的设备角度分辨率大约30°,而有8个RX天线的设备角度分辨率大约15°。因此,直接提高角度分辨率的方法需要提高RX天线的数量。这种方法有它的局限,因为每个额外的RX天线需要设备有一个独立的RX处理链(包括一个低噪放,混频器,中频滤波器和模数转换器)。
多输入多输出(MIMO)指的是雷达有多个TX和RX天线。稍后会讨论,有NTX个TX天线和NRX个RX天线的MIMO雷达的角度分辨率可以做到和有着NTX * NRX个RX天线的SIMO雷达等效。因此MIMO雷达提供了一个高性价比方案来提升雷达的角度分辨率。
本应用笔记作为MIMO雷达的介绍,同时给工程师足够的信息来使用TI的毫米波产品线设计一个MIMO雷达产品。第2节是角度估计基础的快速回顾。第3节展示MIMO雷达的基本原理。这一节阐述了如何通过TX天线多路复用传输来提高角度分辨率。第4节讨论了多路复用TX天线的不同策略。第5节包含使用TI雷达产品线来实现MIMO雷达的讨论。
2.角度估计基础
估计目标的到达角至少需要两个RX天线。图1显示了有一个TX天线和两个相距为d的RX天线的雷达。

图1 使用两个RX天线做角度估计
TX天线的信号从目标反射(与雷达的角度为θ),被两个RX天线接收。从目标来的信号必须传输一个额外的距离dsin(θ)才能到达第二个RX天线。相当于这两个RX天线接收的信号有相位差ω = 2πft = 2π(c/λ)t = (2π/λ)ct = (2π/λ) dsin(θ)。因此,当相位差ω被估计,到达角θ,能用公式1计算。
θ = sin-1(ωλ/2πd) (1)
由于相位差ω只能在(-π, π)的范围内被唯一估计,将ω = π代入公式1,雷达的不模糊视角(FOV)表示为公式2。
θFOV = ±sin-1(λ/2d) (2)
因此,公式3的最大FOV由天线间距d = λ/2获得。
θFOV = ±90° (3)
通常,雷达有NRX大于两个RX天线,如图2的示例,NRX = 4。信号在每个后面的天线都有一个额外的相移ω,相对于前面的天线。因此,信号相位(参照第一个RX天线)在N个天线(例如图2中的[0 ω 2ω 3ω])间呈线性级数。因此,可以通过对NRX天线上的信号进行采样,并对该信号序列进行FFT(通常称为角度FFT)来可靠地估计ω。
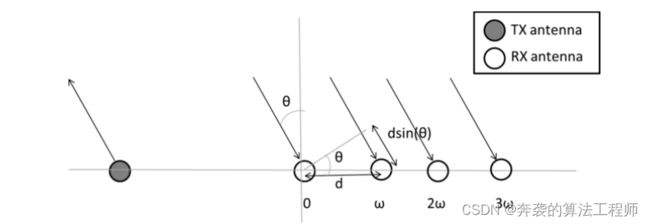
图2 使用4个RX天线做角度估计
注:典型的FMCW雷达信号处理链也包括在角度FFT之前做一个距离FFT和一个多普勒FFT。这些在距离维和多普勒维分辨目标。更多信息见第6节。
增加天线数量可以使FFT的峰值更清晰,从而提高了角度估计的精度,增强了角度分辨率。图3为4天线和8天线雷达设备(天线间距离为λ / 2),θ = -10º和θ = +10º两个点目标的角度FFT。4天线雷达装置无法分辨两个目标;然而,具有8个天线的雷达装置可以。

图3 角度分辨率随着RX天线数量的增加而提高
附录A讨论了对于具有N个等距天线(间距λ / 2)的RX天线阵列,角度分辨率由公式4给出。
θRES = 2 / N (4)
3.MIMO雷达原理
在第2节讨论的基础上,假设我们希望将图2中雷达的角度分辨率(半θRES)能力提高一倍。将角度分辨率提高一倍的方法之一是将RX天线的数量增加一倍(从4个增加到8个),如图4所示。

图4 有1个TX和8个RX天线的雷达
使用MIMO概念,只需一个额外的TX天线就可以实现相同的结果,如下图5所示。

图5 MIMO雷达原理
图5中的雷达有两个发射天线,TX1和TX2。来自TX1的传输使得4个RX天线的相位为[0 ω 2ω 3ω](以第一个RX天线为参考)。由于第二个TX天线(TX2)与TX1的距离为4d,因此与TX1相比,从TX2发出的任何信号都要经过一条长度为4dsin(θ)的额外路径。相应地,每个RX天线处的信号看到额外的4ω相移(相对于TX1传输)。由于TX2的传输,4个RX天线处信号的相位为[4ω 5ω 6ω 7ω]。由于TX1和TX2的传输,将4个RX天线处的相序列串联起来,得到序列[0 ω 2ω 3ω 4ω 5ω 6ω 7ω],与图4中1个TX和8个RX天线的序列相同。可以说,图4中的2TX - 4RX天线配置合成了一个由8个RX天线组成的虚拟阵列(其中暗含1个TX天线)。
综上所述,使用NTX个发射和NRX个接收天线,用户可以生成一个NTX * NRX的虚拟天线阵列(通过适当的天线放置)。因此,采用MIMO雷达技术,可使(虚拟)天线数量成倍增加,对应于角度分辨率的提高。
如果pm表示第m个TX天线(m = 0,1,…NTX) 的坐标,qn表示第n个RX天线(n = 0, 1, 2,…NRX) 的坐标,那么对于所有m和n的可能值,可以计算虚拟天线的位置pm + qn。例如在图5中,p1 = 0、p2 = 4,q1 = 0、q2 = 1、q3 = 2 、q4 = 3 (坐标用单位d表示位置,假设TX1(对应RX1)被认为是TX的原点 (对应RX)天线。
图6显示MIMO雷达原理也可以扩展到多维阵列。
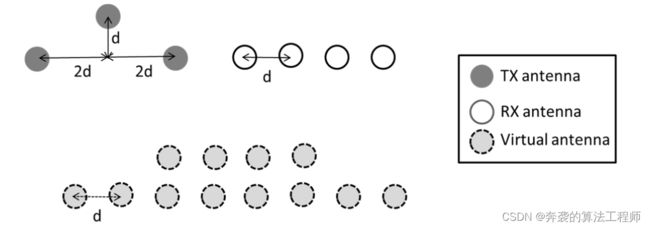
图6 二维MIMO阵列(具备方位和俯仰估计能力)
不同的物理天线配置可以实现相同的虚拟天线阵。图7显示了这些配置,其中图(a)和图(b)中的物理阵列都合成了图(c)中的相同虚拟阵列。在这种情况下,板上布局和走线的便利性可能决定了最终的选择。
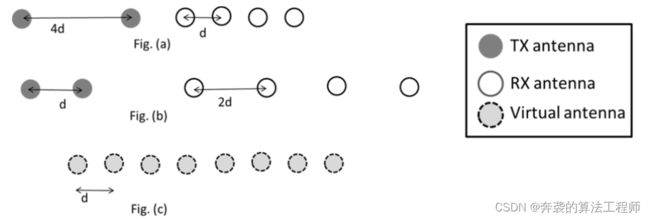
图7 不同配置实现相同虚拟天线阵列
4.MIMO雷达多路复用策略
第3节详细介绍了MIMO雷达如何通过使用同一组RX天线处理来自多个TX天线传输的信号来工作。值得注意的是,RX天线必须能够分离对应于不同TX天线的信号(例如,通过在正交信道上传输不同的TX天线)。有不同的方法来实现这种分离[3],这里讨论两种这样的技术:时分复用(TDM)和二进制相位调制(BPM)。这些技术在调频连续波(FMCW)雷达的背景下描述如下,尽管这些技术具有更广泛的适用性。关于FMCW雷达技术的介绍,参见[5]。
4.1 时分调制多路复用(TDM-MIMO)
在TDM-MIMO[1]中,正交性是在时间上。每个帧由几个块组成,每个块由NTX时隙组成,每个时隙对应一个NTX TX天线的传输。在图8中,对于NTX = 2的FMCW雷达,TX1和TX2为备用时隙。TDM-MIMO是从多个TX天线分离信号的最简单方法,因此被广泛使用。
在TDM-MIMO FMCW雷达的典型处理方案中,对每个TX-RX对进行2D-FFT(距离-多普勒FFT[5])。每个2D-FFT对应一个虚拟天线。对于NTX = 2, NRX = 4的雷达,则计算出4 × 2 = 8,其距离-多普勒矩阵如图9所示。然后对2D-FFT矩阵进行非相干求和来创建预检测矩阵,然后检测算法识别该矩阵中对应于有效对象的峰值。对于每个有效对象,在这些多个2D - FFT的相应峰值上执行角度FFT,以确定该对象的到达角度。在应用角度FFT之前,必须执行多普勒校正步骤,以校正任何速度引起的相位变化。
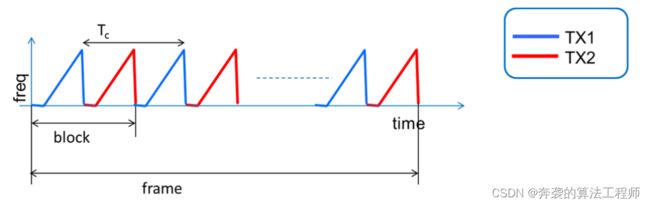
图8 TDM-MIMO
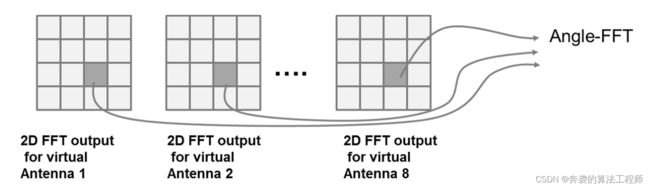
图9 MIMO雷达角度估计
4.2 二进制相位调制(BPM-MIMO)
前面描述的TDM-MIMO方案易于实现,但是,它没有使用雷达设备的完整发射能力(因为在任何时候只有一个发射机是活动的)。现有的技术以调制帧中chirp的初始相位为中心,允许在多个TX天线之间同时传输,同时仍然确保这些信号的分离。在BPM-MIMO中,这些相位为0º或180º(相当于将每个chirp乘以+1或-1)。BPM-MIMO的一种变体描述如下。
与TDM-MIMO类似,一个帧由多个块组成,每个块由NTX连续发射信号组成。然而,与TDM-MIMO(每个时隙只有一个TX天线是活动的)不同,所有NTX个天线在每个块的每个NTX时隙中都是活动的。对于每个块,来自多个TX天线的发射信号使用空间编码(使用BPM)进行编码,这允许每个发射机随后对接收到的数据进行排序。在TDM-MIMO中,每个时隙可以传输的功率受到一个TX天线可以辐射的最大功率的限制。允许在所有NTX个发射机上同时发射信号(同时仍然通过使用合适的空间代码确保完美的分离),让用户增加每个时隙的总传输功率。这转化为10log10 (NTX)的信噪比得益。

图10 空间编码BMP-MIMO
图10显示了在NTX = 2的情况下使用的技术。假设S1和S2表示来自两个发射机的chirp。块中的第一个槽发送Sa = S1 + S2的组合信号。同样,块中的第二个槽传输Sb = S1 - S2的组合信号。在特定的接收RX天线上使用相应的接收信号(Sa和Sb),可以使用S1 = (Sa+ Sb) / 2和S2 = (Sa - Sb) / 2将各个发射机的组件分离出来。对于NTX = 4的示例,使用4 × 4 Hadamard代码实现分离,请参见[3]。
处理流程几乎与前面在TDM-MIMO环境中描述的流程相同,除了一个解码块,它使来自各个TX天线的信号贡献能够在接收数据中分离。这种解码必须在角度FFT之前进行(最好在多普勒FFT之后进行,以便在解码之前应用非零速度导致的相位校正)。
5.在毫米波传感器实现MIMO雷达
TI的毫米波传感器产品线具有模拟前端与数字逻辑紧密耦合的特点。这种耦合在设计TX信号时具有相当大的灵活性。此外,数字逻辑中的状态机允许预先对多种chirp类型和各种帧序列进行编程,从而减轻了处理器实时控制前端的负担。还提供了API[4],将数字逻辑中的所有寄存器抽象出来,并向程序员提供简单直观的界面。所有这些内容构成了一个易于学习且易于处理的编程模型。
在对TX信号进行编程时,请记住三个概念:配置文件、chirp和帧。下面将对每一个概念进行简要描述。
•配置文件:配置文件是chirp的模板,由与chirp的发送和接收相关的各种参数组成。这包括启动频率、斜率、持续时间和空闲时间等TX参数,以及ADC采样率等RX参数。最多可以定义和存储四个不同的配置文件。
•Chirp:每种chirp类型都与一个配置文件相关联,并继承该配置文件的所有属性。可以与每个chirp相关联的附加属性包括应该传输chirp的TX天线和应该应用的任何二进制相位调制。最多可以定义512种不同的chirp类型(每种类型都与四个预定义配置文件中的一个相关联)。
•帧:通过使用先前定义的chirp类型定义一系列chirp来构造帧。也可以对多个帧进行排序,每个帧由不同的chirp序列组成。
因此,为特定MIMO用例对设备进行编程相当于适配配置文件、chirp和帧。
图11显示了为TDM-MIMO操作配置设备的步骤,图12显示了为BPM-MIMO操作配置设备的步骤。配置策略、chirp和帧对应的消息说明请参见[4]。
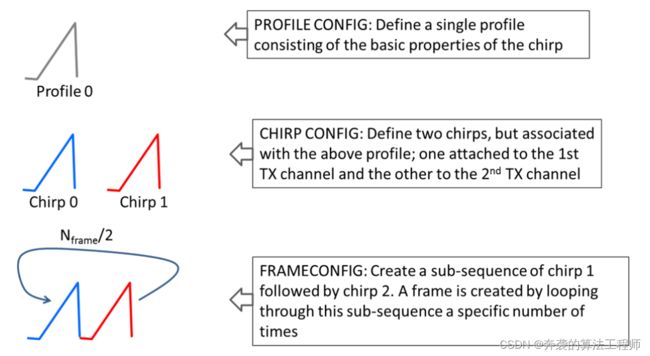
图11 配置TDM-MIMO工作模式的步骤
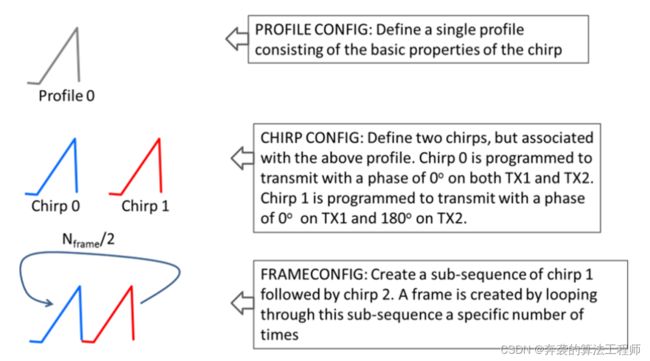
图12 配置BPM-MIMO工作模式的步骤
6. 参考资料
1. FC Robey et al., MIMO Radar Theory and Experimental Results, 38th Asimolar Conference on Signal, Systems, and Computers
2. RY Chiao et al., Sparse Array Imaging with spatially-encoded transmits, IEEE Ultrasonics Symposium
3. H.Sun et al., Analysis and Comparison of MIMO Radar Waveforms, 2014 International Radar Conference.
4. mmWave SDK User's Guide that is incuded in MMWAVE-SDK Software development kit (SDK) | TI.com
5. Introduction to mmWave Sensing: FMCW Radars