强化学习——Task01 强化学习概述
强化学习——Task01 强化学习概述
-
- 1.Reinforement Learning
- 2.Introduction to Sequential Decision Making
-
- Agent and Environment
- Reward
- 3.Sequential Decision Making
- 4.Action Spaces
- 5.Major Components of an RL Agent
- 6.Types of RL Agents
- 7.Exploration and Exploitation
- 8.Experiment with Reinforcement Learning
- 9. [原文参考链接](https://datawhalechina.github.io/leedeeprl-notes/#/chapter1/chapter1?id=k-armed-bandit)
1.Reinforement Learning
-
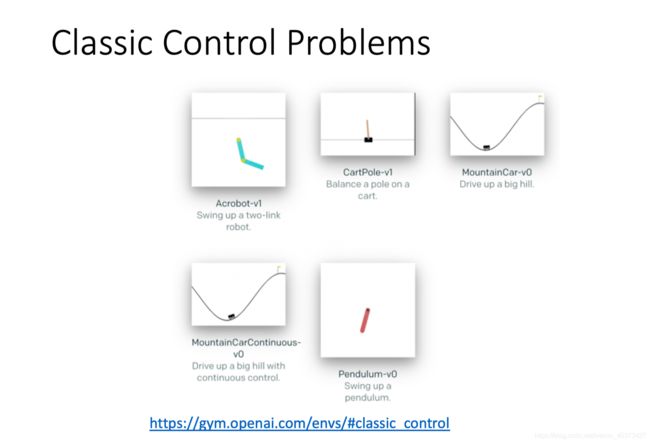
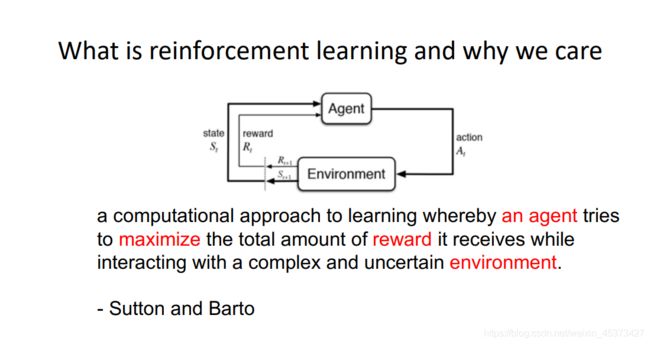
强化学习讨论的问题是一个 智能体(agent) 怎么在一个复杂不确定的环境(environment)里面去极大化它能获得的奖励。
-
示意图由两部分组成:agent 和 environment。在强化学习过程中,agent 跟 environment 一直在交互。Agent 在环境里面获取到状态,agent 会根据从环境中获得的状态输出一个 action决策。然后这个决策会放到环境之中去,环境会通过这个 agent 采取的决策,输出下一个状态以及当前的这个决策得到的奖励。Agent 的目的就是为了尽可能多地从环境中获取奖励。
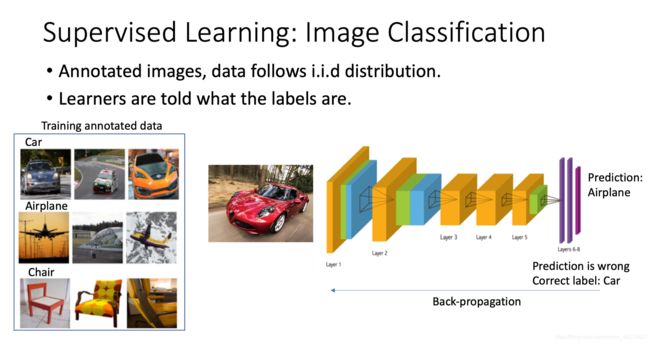
我们可以把强化学习跟监督学习做一个对比。上图说的是 supervised learning。举个图片分类的例子,监督学习就是说我们有一大堆标定的数据,比如车、飞机、凳子这些标定的图片,这些图片都要满足 i.i.d 分布(独立同分布),就是它们之间是没有关联的一个分布。然后我们训练一个分类器,比如说右边这个神经网络。为了分辨出这个图片是车辆还是飞机,训练过程中,我们把真实的 label 给了这个网络。当这个网络做出一个错误的预测,比如现在输入了这个汽车的图片,它预测出来是飞机。我们就会直接告诉它,你这个预测是错误的,正确的 label 应该是车。然后我们把这个错误写成一个损失函数(loss function),通过 Backpropagation 来训练这个网络。所以在监督学习过程中,有两个假设, -
输入的数据,标定的数据,它都是没有关联的,尽可能没有关联。因为如果有关联的话,这个网络是不好学习的。
-
我们告诉这个 learner 正确的标签是什么,这样它可以通过正确的标签来修正自己的这个预测。

在强化学习里面,这两点其实都不满足。举一个 Atari Breakout 游戏的例子,这是一个打砖块的游戏,控制木板,然后把这个球反弹到上面来消除这些砖块。 -
在游戏过程中,大家可以发现这个 agent 得到的观测不是个 i.i.d 的分布,上一帧下一帧其实有非常强的连续性。
-
另外一点,在玩游戏的过程中,你并没有立刻获得这个反馈。比如你现在把这个木板往右移,那么只会使得这个球往上或者往左上去一点,你并不会得到立刻的反馈。所以强化学习这么困难的原因是没有得到很好的反馈,然后你依然希望这个 agent 在这个环境里面学习。
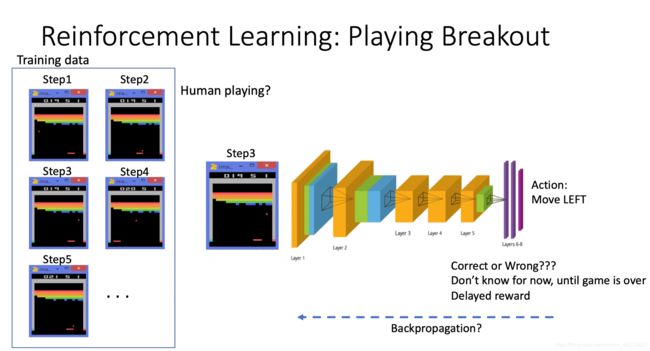
强化学习的训练数据就是这样一个玩游戏的过程。你从第一步开始,采取一个决策,比如说你把这个往右移,接到这个球了。第二步你又做出决策,得到的 training data 是一个玩游戏的序列。
比如现在是在第三步,你把这个序列放进去,你希望这个网络可以输出一个决策,在当前的这个状态应该输出往右移或者往左移。这里有个问题,就是我们没有标签来说明你现在这个动作是正确还是错误,必须等到这个游戏结束可能,这个游戏可能十秒过后才结束。现在这个动作往左往右到底是不是对最后游戏的结束能赢有帮助,其实是不清楚的的。这里就面临一个延迟奖励(Delayed Reward),所以就使得训练这个网络非常困难。
我们对比下强化学习和监督学习。
-
首先强化学习输入的序列的数据并不是像 supervised learning 里面这些样本都是独立的。(样本非独立)
-
另外一点是 learner 并没有被告诉你每一步正确的行为应该是什么。Learner 不得不自己去发现哪些行为可以使得它最后得到这个奖励,只能通过不停地尝试来发现最有利的 action。(不断尝试)
-
这里还有一点是 agent 获得自己能力的过程中,其实是通过不断地试错(trial-and-error exploration)。Exploration 和 exploitation 是强化学习里面非常核心的一个问题。Exploration 是说你会去尝试一些新的行为,这些新的行为有可能会使你得到更高的奖励,也有可能使你一无所有。Exploitation 说的是你就是就采取你已知的可以获得最大奖励的行为,你就重复执行这个 action 就可以了,因为你已经知道可以获得一定的奖励。因此,我们需要在 exploration 和 exploitation 之间取得一个权衡,这也是在监督学习里面没有的情况。
-
在强化学习过程中,没有非常强的 supervisor,只有一个奖励信号(reward signal),就是环境会在很久以后告诉你之前你采取的行为到底是不是有效的。Agent 在这个强化学习里面学习的话就非常困难,因为你没有得到即时反馈。当你采取一个行为过后,如果是监督学习,你就立刻可以获得一个指引,就说你现在做出了一个错误的决定,那么正确的决定应该是谁。而在强化学习里面,环境可能会告诉你这个行为是错误的,但是它并没有告诉你正确的行为是什么。而且更困难的是,它可能是在一两分钟过后告诉你错误,它再告诉你之前的行为到底行不行。所以这也是强化学习和监督学习不同的地方。(延时反馈)
价值
- 为什么我们关注这个强化学习,其中非常重要的一点就是强化学习得到的这个模型可以取得超人类的结果。监督学习获取的这些监督数据,其实是让人来标定的。比如说 ImageNet,这些图片都是人类标定的。那么我们就可以确定这个算法的 upper bound(上限),人类的这个标定结果决定了它永远不可能超越人类。但是对于强化学习,它在环境里面自己探索,有非常大的潜力,它可以获得超越人的能力的这个表现,比如说 AlphaGo,谷歌 DeepMind 的 AlphaGo 这样一个强化学习的算法可以把人类最强的棋手都打败。
Example
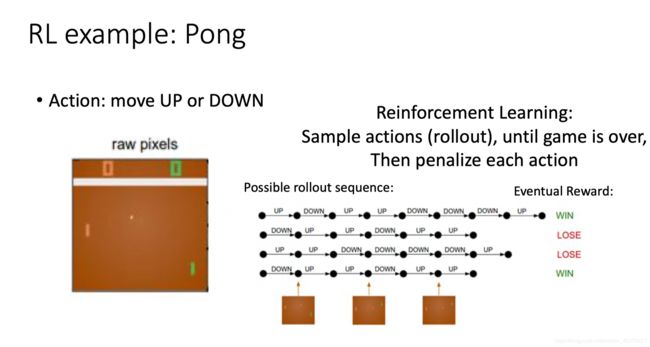
- 上图是强化学习的一个经典例子,就是雅达利的一个叫 Pong 的游戏。这个游戏就是把这个球拍到左边,然后左边这个选手需要把这个球拍到右边。
- 在这个 pong 的游戏里面,决策其实就是两个动作:往上或者往下。如果强化学习是通过学习一个 policy network 来分类的话,其实就是输入当前帧的图片,然后 policy network 就会输出所有决策的可能性。
- 上图的过程是 rollout 的一个过程。Rollout 的意思是从当前帧去生成很多局的游戏。然后这个很多局就通过是你当前的这个网络去跟这个环境交互,你就会得到一堆这个观测。你可以把每一个观测看成一个轨迹(trajectory),轨迹的话就是当前帧以及它采取的策略,每一步的这个策略都有。最后结束过后,你会知道你到底有没有把这个球击到对方区域,对方没有接住,你是赢了还是输了。我们可以通过观测序列以及 Eventual Reward 来训练这个 agent ,使它尽可能地采取最后可以获得这个 Eventual Reward 的过程。

2.Introduction to Sequential Decision Making
Agent and Environment

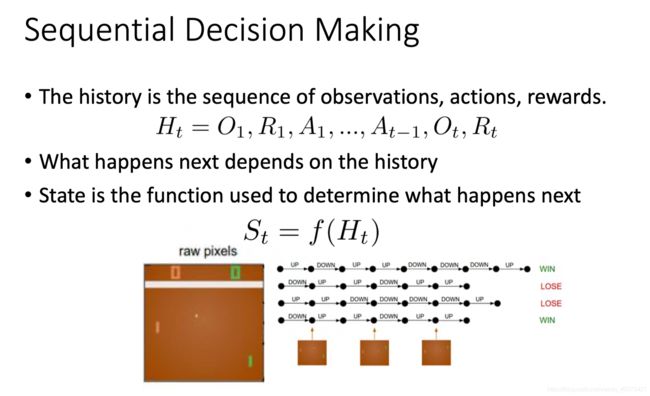
接下来我们讲序列决策(Sequential Decision Making)过程。强化学习研究的问题是 agent 跟环境交互,上图左边画的是一个 agent,agent 一直在跟环境进行交互。这个 agent 把它输出的动作给环境,环境取得这个动作过后,会进行到下一步,然后会把下一步的观测跟它上一步是否得到奖励返还给 agent。通过这样的交互过程会产生很多观测,agent 就是为了从这些观测之中学到能极大化奖励的策略。
Reward
- 奖励是由环境给的一个反馈信号,这个信号指定了这个 agent 在某一步采取了某个策略是否得到奖励。强化学习的目的就是为了极大化 agent 可以获得的奖励,agent 在这个环境里面存在的目的就是为了极大它的期望积累的奖励。

3.Sequential Decision Making
在一个强化学习环境里面,agent 的目的就是选取一系列的动作来极大化它的奖励,所以这些采取的动作必须有长期的影响。但在这个过程里面,它的奖励其实是被延迟了,就是说你现在采取的某一步决策可能要等到时间很久过后才知道这一步到底产生了什么样的影响。
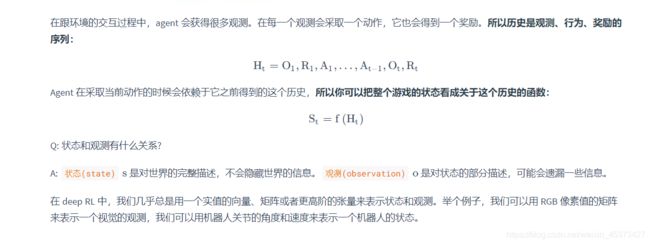
- 在 agent 的内部也有一个函数来更新这个状态。当 agent 的状态跟环境的状态等价的时候,我们就说这个环境是 full observability,就是全部可以观测。换句话说,当 agent 能够观察到环境的所有状态时,我们称这个环境是完全可观测的(fully observed)。
- 但是有一种情况是 agent 得到的观测并不能包含所有环境运作的状态,因为在这个强化学习的设定里面,环境的状态才是真正的所有状态。比如 agent 在玩这个 black jack 这个游戏,它能看到的其实是牌面上的牌。或者在玩雅达利游戏的时候,观测到的只是当前电视上面这一帧的信息,你并没有得到游戏内部里面所有的运作状态。也就是说当 agent 只能看到部分的观测,我们就称这个环境是部分可观测的(partially observed)。在这种情况下面,强化学习通常被建模成一个 POMDP 的问题。
- 部分可观测马尔可夫决策过程(Partially Observable Markov Decision Processes, POMDP)是一个马尔可夫决策过程的泛化。POMDP 依然具有马尔可夫性质,但是假设智能体无法感知环境的状态 s,只能知道部分观测值 o。比如在自动驾驶中,智能体只能感知传感器采集的有限的环境信息。
4.Action Spaces
不同的环境允许不同种类的动作。在给定的环境中,有效动作的集合经常被称为动作空间(action space)。像 Atari 和 Go 这样的环境有离散动作空间(discrete action spaces),在这个动作空间里,agent 的动作数量是有限的。在其他环境,比如在物理世界中控制一个 agent,在这个环境中就有连续动作空间(continuous action spaces) 。在连续空间中,动作是实值的向量。
例如,
- 走迷宫机器人如果只有东南西北这 4 种移动方式,则其为离散动作空间;
- 如果机器人向 360° 中的任意角度都可以移动,则为连续动作空间。
5.Major Components of an RL Agent
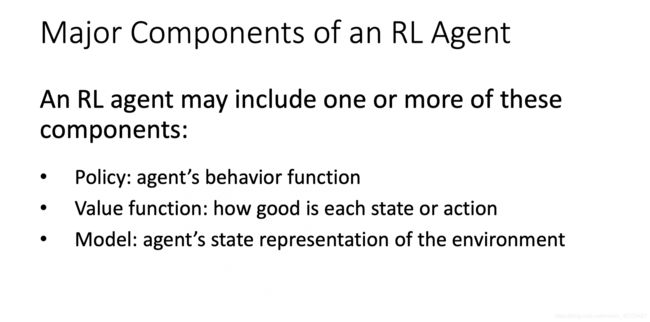
对于一个强化学习 agent,它有如下组成成分:
-
首先 agent 有一个 policy function,agent 会用这个函数来选取下一步的动作。

-
然后它也可能生成一个价值函数(value function)。我们用价值函数来对当前状态进行估价,它就是说你进入现在这个状态,可以对你后面的收益带来多大的影响。当这个价值函数大的时候,说明你进入这个状态越有利。
-
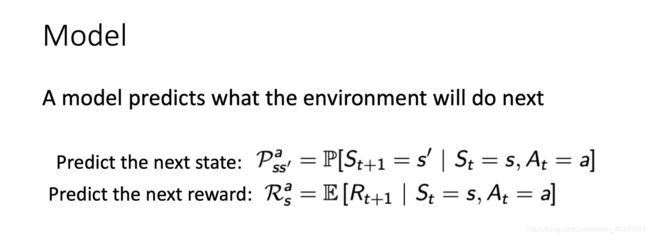
另外一个组成成分是模型(model)。模型表示了 agent 对这个环境的状态进行了理解,它决定了这个世界是如何进行的。
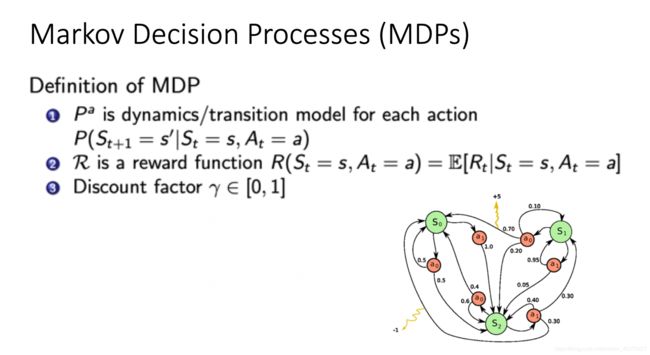
当我们有了这三个成分过后,就形成了一个 Markov Decision Process。这个决策过程可视化了状态之间的转移以及采取的行为。
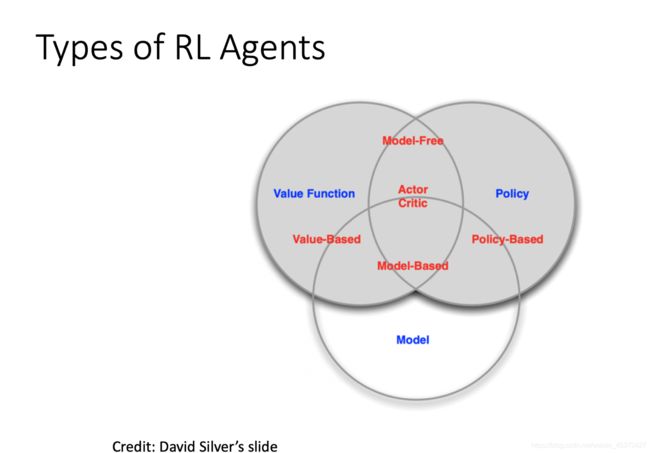
6.Types of RL Agents
根据强化学习 agent 的不同,我们可以把 agent 进行归类。
-
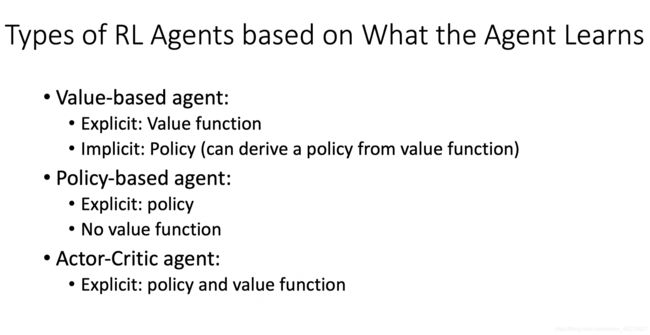
基于价值函数的 agent。这一类 agent 显式地学习的是价值函数,隐式地学习了它的策略。因为这个策略是从我们学到的价值函数里面推算出来的。
-
基于策略的 agent,它直接去学习 policy,就是说你直接给它一个 state,它就会输出这个动作的概率。在这个 policy-based agent 里面并没有去学习它的价值函数。
-
把 value-based 和 policy-based 结合起来就有了 Actor-Critic agent。这一类 agent 就把它的策略函数和价值函数都学习了,然后通过两者的交互得到一个最佳的行为。
-
Q: 基于策略迭代和基于价值迭代的强化学习方法有什么区别?
-
A: 对于一个状态转移概率已知的马尔可夫决策过程,我们可以使用动态规划算法来求解;从决策方式来看,强化学习又可以划分为基于策略迭代的方法和基于价值迭代的方法。决策方式是智能体在给定状态下从动作集合中选择一个动作的依据,它是静态的,不随状态变化而变化。
-
在基于策略迭代的强化学习方法中,智能体会制定一套动作策略(确定在给定状态下需要采取何种动作),并根据这个策略进行操作。强化学习算法直接对策略进行优化,使制定的策略能够获得最大的奖励。
-
而在基于价值迭代的强化学习方法中,智能体不需要制定显式的策略,它维护一个价值表格或价值函数,并通过这个价值表格或价值函数来选取价值最大的动作。基于价值迭代的方法只能应用在不连续的、离散的环境下(如围棋或某些游戏领域),对于行为集合规模庞大、动作连续的场景(如机器人控制领域),其很难学习到较好的结果(此时基于策略迭代的方法能够根据设定的策略来选择连续的动作)。
-
基于价值迭代的强化学习算法有 Q-learning、 Sarsa 等,而基于策略迭代的强化学习算法有策略梯度算法等。此外, Actor-Critic 算法同时使用策略和价值评估来做出决策,其中,智能体会根据策略做出动作,而价值函数会对做出的动作给出价值,这样可以在原有的策略梯度算法的基础上加速学习过程,取得更好的效果。
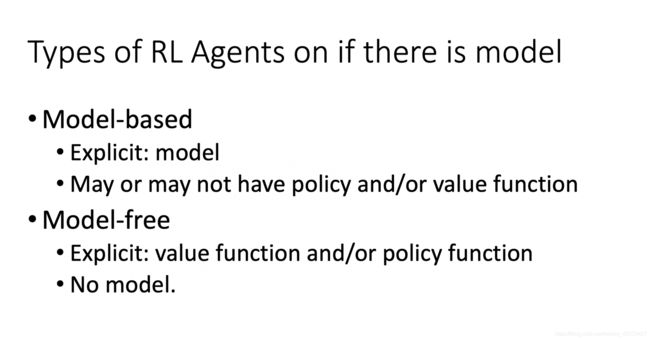
另外,我们是可以通过 agent 到底有没有学习这个环境模型来分类。 -
第一种是 model-based(有模型) RL agent,它通过学习这个状态的转移来采取措施。
-
另外一种是 model-free(免模型) RL agent,它没有去直接估计这个状态的转移,也没有得到环境的具体转移变量。它通过学习 value function 和 policy function 进行决策。这种 model-free 的模型里面没有一个环境转移的一个模型。
-
Q: 有模型强化学习和免模型强化学习有什么区别?
-
A: 针对是否需要对真实环境建模,强化学习可以分为有模型学习和免模型学习。
-
有模型学习是指根据环境中的经验,构建一个虚拟世界,同时在真实环境和虚拟世界中学习;
-
免模型学习是指不对环境进行建模,直接与真实环境进行交互来学习到最优策略。
-
总的来说,有模型学习相比于免模型学习仅仅多出一个步骤,即对真实环境进行建模。因此,一些有模型的强化学习方法,也可以在免模型的强化学习方法中使用。在实际应用中,如果不清楚该用有模型强化学习还是免模型强化学习,可以先思考一下,在智能体执行动作前,是否能对下一步的状态和奖励进行预测,如果可以,就能够对环境进行建模,从而采用有模型学习。
-
免模型学习通常属于数据驱动型方法,需要大量的采样来估计状态、动作及奖励函数,从而优化动作策略。例如,在 Atari 平台上的 Space Invader 游戏中,免模型的深度强化学习需要大约 2 亿帧游戏画面才能学到比较理想的效果。相比之下,有模型学习可以在一定程度上缓解训练数据匮乏的问题,因为智能体可以在虚拟世界中行训练。
-
免模型学习的泛化性要优于有模型学习,原因是有模型学习算需要对真实环境进行建模,并且虚拟世界与真实环境之间可能还有差异,这限制了有模型学习算法的泛化性。
-
有模型的强化学习方法可以对环境建模,使得该类方法具有独特魅力,即“想象能力”。在免模型学习中,智能体只能一步一步地采取策略,等待真实环境的反馈;而有模型学习可以在虚拟世界中预测出所有将要发生的事,并采取对自己最有利的策略。
-
目前,大部分深度强化学习方法都采用了免模型学习,这是因为:
-
免模型学习更为简单直观且有丰富的开源资料,像 DQN、AlphaGo 系列等都采用免模型学习;
在目前的强化学习研究中,大部分情况下环境都是静态的、可描述的,智能体的状态是离散的、可观察的(如 Atari 游戏平台),这种相对简单确定的问题并不需要评估状态转移函数和奖励函数,直接采用免模型学习,使用大量的样本进行训练就能获得较好的效果。、
7.Exploration and Exploitation

在强化学习里面,Exploration 和 Exploitation 是两个很核心的问题。
-
Exploration 是说我们怎么去探索这个环境,通过尝试不同的行为来得到一个最佳的策略,得到最大奖励的策略。
-
Exploitation 是说我们不去尝试新的东西,就采取已知的可以得到很大奖励的行为。
-
因为在刚开始的时候强化学习 agent 不知道它采取了某个行为会发生什么,所以它只能通过试错去探索。所以 Exploration 就是在试错来理解采取的这个行为到底可不可以得到好的奖励。Exploitation 是说我们直接采取已知的可以得到很好奖励的行为。所以这里就面临一个 trade-off,怎么通过牺牲一些短期的 reward 来获得行为的理解。
8.Experiment with Reinforcement Learning