关于设置Linux线程调度策略的实践
在Linux下运行应用方案,在某些场景下,为了调试和调优,可能会有调整任务的优先级的需求,它的基本流程是这样的:
#include
#include
#include
#include
#include
#include
#include
#include
static void * worker_thread1(void * param)
{
while(1)
{
printf("%s line %d.\n", __func__, __LINE__);
sleep(1);
}
return NULL;
}
static void * worker_thread(void * param)
{
pthread_t demo_handle;
int ret = pthread_create(&demo_handle, NULL, worker_thread1, NULL);
if(ret != 0)
{
printf("%s line %d, fatal error.\n", __func__, __LINE__);
return NULL;
}
while(1)
{
printf("%s line %d.\n", __func__, __LINE__);
sleep(1);
}
pthread_join(demo_handle, NULL);
return NULL;
}
int main(void)
{
pthread_t pthread_demo_handle;
int policy = 0;
pthread_attr_t attr;
struct sched_param param;
bzero((void*)¶m, sizeof(struct sched_param));
pthread_attr_init(&attr);
/*pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);*/
//pthread_attr_setinheritsched(&attr, PTHREAD_INHERIT_SCHED);
pthread_attr_setschedpolicy(&attr, SCHED_RR);
pthread_attr_getschedpolicy(&attr, &policy);
int max_priority = sched_get_priority_max(policy);
int min_priority = sched_get_priority_min(policy);
param.sched_priority = max_priority;
pthread_attr_setschedparam(&attr, ¶m);
pthread_attr_setstacksize(&attr, 1*1024*1024);
int ret = pthread_create(&pthread_demo_handle, &attr, worker_thread, NULL);
if(ret != 0)
{
printf("%s line %d, fatal error.\n", __func__, __LINE__);
return -1;
}
pthread_join(pthread_demo_handle, NULL);
return 0;
} 可是经过实际的测试,发现被创建任务的优先级并没有出现预期的结果
可以看到,根据sched节点获取到的信息,并未出现被修改线程的优先级成为实时优先级的情况,这是为何呢?
pthread_attr_setinheritsched
出现设置子线程调度策略不成功的原因是我们没有调用pthread_attr_setinheritsched并设置正确的参数。
pthread_attr_setinheritsched 的作用是设置线程是否继承父线程调度策略,分为两种情况:
- attr:线程属性结构体地址
- inheritsched:是否继承父线程的调度策略
- PTHREAD_EXPLICIT_SCHED:不继承,只有不继承父线程的调度策略才可以设置线程的调度策略
- PTHREAD_INHERIT_SCHED:继承父进程的调度策略
默认的情况下,设置的是PTHREAD_INHERIT_SCHED,也就是说,被创建线程完全按照父线程的调度策略创建,即便程序创建线程时,指定了不同的调度策略,这会导致设置失效,这就是我们上面遇到的情况。
![]()
那该怎么处理呢?方法是调用
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
#include
#include
#include
#include
#include
#include
#include
#include
static void * worker_thread1(void * param)
{
while(1)
{
printf("%s line %d.\n", __func__, __LINE__);
sleep(1);
}
return NULL;
}
static void * worker_thread(void * param)
{
pthread_t demo_handle;
int ret = pthread_create(&demo_handle, NULL, worker_thread1, NULL);
if(ret != 0)
{
printf("%s line %d, fatal error.\n", __func__, __LINE__);
return NULL;
}
while(1)
{
printf("%s line %d.\n", __func__, __LINE__);
sleep(1);
}
pthread_join(demo_handle, NULL);
return NULL;
}
int main(void)
{
pthread_t pthread_demo_handle;
int policy = 0;
pthread_attr_t attr;
struct sched_param param;
bzero((void*)¶m, sizeof(struct sched_param));
pthread_attr_init(&attr);
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
//pthread_attr_setinheritsched(&attr, PTHREAD_INHERIT_SCHED);
pthread_attr_setschedpolicy(&attr, SCHED_RR);
pthread_attr_getschedpolicy(&attr, &policy);
int max_priority = sched_get_priority_max(policy);
int min_priority = sched_get_priority_min(policy);
param.sched_priority = max_priority;
pthread_attr_setschedparam(&attr, ¶m);
pthread_attr_setstacksize(&attr, 1*1024*1024);
int ret = pthread_create(&pthread_demo_handle, &attr, worker_thread, NULL);
if(ret != 0)
{
printf("%s line %d, fatal error.\n", __func__, __LINE__);
return -1;
}
pthread_join(pthread_demo_handle, NULL);
return 0;
} 修改后的代码如下:
可见这次,新创建线程的调度策略和调度优先级都有了新的变化,变成了我们预期的设定值。
几个关键函数解析
bzero:

pthread_attr_init


![]()
int pthread_attr_setinheritsched(pthread_attr_t *a, int inherit):

pthread_attr_getinheritsched:

![]()

pthread_attr_setschedpolicy:

pthread_attr_getschedpolicy:

sched_get_priority_max/sched_get_priority_min:


pthread_create:



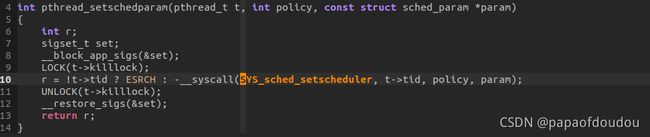
运行过程中,改变线程调度策略和优先级的调用:pthread_setschedparam
关于调度策略的继承关系,可以从sched_fork函数下面的逻辑即可看出
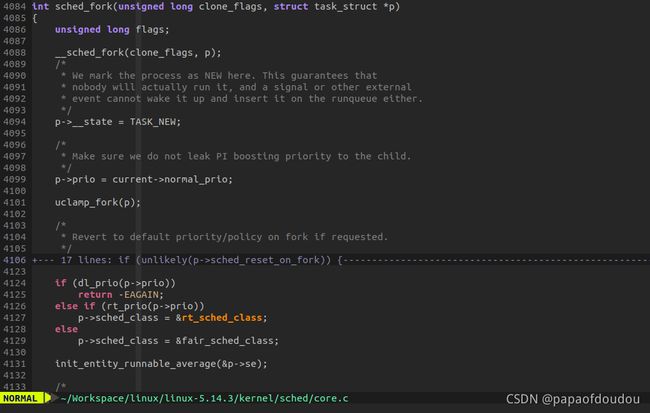
p->policy的初始化是在struct task_struct分配的时候,由父线程的内容做memcpy完成的,所以一开始大部分的成员都是按照父线程的样子初始化的,后面在根据各种各样的条件,修改成子线程应该有的样子。

C++中运行时线程自身设置优先级:
#include
#include
#include
#include
using namespace std;
int get_thread_info(void)
{
pthread_t self = pthread_self();
int policy;
struct sched_param param;
if (pthread_getschedparam(self, &policy, ¶m) != 0) {
printf("%s line %d, pthread_getschedparam error.\n",
__func__, __LINE__);
return -1;
}
switch (policy) {
case SCHED_FIFO:
printf("SCHED_FIFO\n");
break;
case SCHED_RR:
printf("SCHED_RR\n");
break;
case SCHED_OTHER:
printf("SCHED_OTHER\n");
break;
default:
printf("unknown.\n");
break;
}
printf("current thread priority:%d\n", param.sched_priority);
return 0;
}
void adjust_priority(void)
{
struct sched_param params;
params.sched_priority = 50; // 50是优先级值,可以根据需求设置
if(pthread_setschedparam(pthread_self(), SCHED_RR, ¶ms) != 0) {
printf("%s line %d, error, failure.\n", __func__, __LINE__);
} else {
printf("%s line %d, set priority success.\n", __func__, __LINE__);
}
get_thread_info();
return;
}
int main(void)
{
int nTimerValue = 100; //wait for 100 ms
adjust_priority();
for (int i = 0; /*i < 500*/; ++i) {
auto start = std::chrono::steady_clock::now();
std::this_thread::sleep_for(std::chrono::microseconds(nTimerValue));
auto clock_end = std::chrono::steady_clock::now();
long lElapsetimeMs = std::chrono::duration_cast(clock_end - start).count();
char szBuff[255];
sprintf(szBuff, "[%d] slept Time: %ld MiroSec\n", i, lElapsetimeMs);
cout << szBuff;
}
cout << "system clock : ";
cout << chrono::system_clock::period::num << "/" << chrono::system_clock::period::den << "s" << endl;
cout << "steady clock : ";
cout << chrono::steady_clock::period::num << "/" << chrono::steady_clock::period::den << "s" << endl;
cout << "high resolution clock : ";
cout << chrono::high_resolution_clock::period::num << "/" << chrono::high_resolution_clock::period::den << "s" << endl;
system("pause");
return 0;
} 
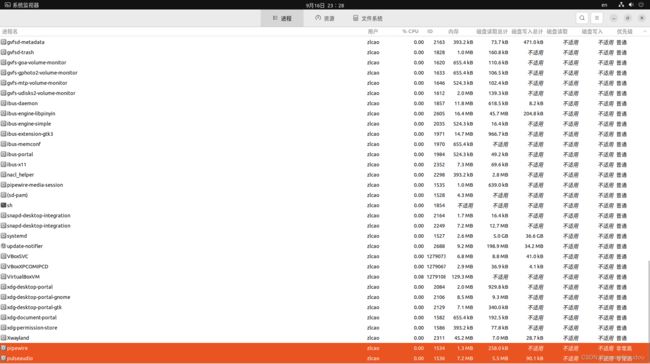
UBUNTU22.04中的系统监视器,可以查看到普通进程(CFS)和高优先级进程(实时进程)