图像增强系列二:Underexposed Photo Enhancement using Deep Illumination Estimation
可能涉及的点。。
图像处理中,如一些去雾去雨算法等,直接在原图上操作的话计算量太大。因而常常下采样原图后再进行处理,处理完后再进行上采样恢复。但直接上采样,如最近邻,双线性等。上采样结果在边缘处效果都不太好。
paper1:Joint Bilateral Upsampling
即下采样处理完后再上采样的过程中,利用原图(大分辨率)的信息来辅助恢复上采样。 f 和 g f和g f和g为双边滤波核, I ~ \tilde I I~为原大分辨率图, p , q p,q p,q为对应大分辨率的坐标, p ↓ 和 q ↓ p\downarrow 和q\downarrow p↓和q↓为对应的在小分辨率下的坐标(即带小数坐标)。S为处理后的小分辨率图, S ~ \tilde S S~为上采样结果。
S ~ p = 1 k p ∑ q ↓ ∈ Ω S q ↓ f ( ∣ ∣ p ↓ − q ↓ ∣ ∣ ) g ( ∣ ∣ I ~ p − I ~ q ∣ ∣ ) (1) \tilde S_p={1\over k_p}\sum_{q\downarrow \in Ω}S_{q\downarrow}f(||p\downarrow - q\downarrow||)g(||\tilde I_p - \tilde I_q||) \tag1 S~p=kp1q↓∈Ω∑Sq↓f(∣∣p↓−q↓∣∣)g(∣∣I~p−I~q∣∣)(1)
在上式中 S q ↓ S_{q\downarrow} Sq↓中的 q ↓ q\downarrow q↓是取整的,而在 f f f中是带小数的。
另,直接上采样(最近邻,双线性等)处理后的小分辨率图,而后在用双边滤波。 I I I为上采样图。
S ~ p = 1 k p ∑ q ∈ Ω I q f ( ∣ ∣ p − q ∣ ∣ ) g ( ∣ ∣ I ~ p − I ~ q ∣ ∣ ) (2) \tilde S_p={1\over k_p}\sum_{q\in Ω}I_qf(||p-q||)g(||\tilde I_p - \tilde I_q||)\tag 2 S~p=kp1q∈Ω∑Iqf(∣∣p−q∣∣)g(∣∣I~p−I~q∣∣)(2)
注:这部分是自己的理解,不知道是否正确。。。
小结:和高斯双边类似,一个核基于距离( f f f),一个核基于像素值( g g g)。由于 g g g中实际上考虑的是像素间的相对差值。因此对如去雨,去雾,增强之类的图像处理,其处理前后相对大小的关系基本不变。因为可以用处理前的大分辨率图去指导处理后的小分辨率图上采样。对边缘部分的恢复应该帮助挺大的。
试了下,没有实现出效果。。后续再找找问题吧。。也可能理解错了。
paper2:Bilateral Guided Upsampling 后续再补吧
Underexposed Photo Enhancement using Deep Illumination Estimation
dataset:收集一批低曝光图片,然后找人P图,作为对应的ground truth。
网络结构:
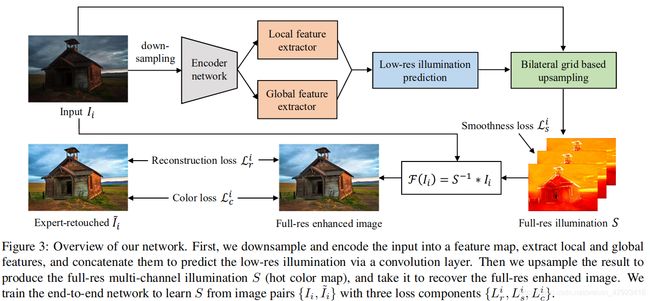
网络里主要包含2个模块Local feature extractor(contrast, detail sharpness, shadow, and highlight) 和一个global features extractor(color distribution, average brightness, and scene category)。
基本思想:
网络从低光照输入 I I I得到一个映射关系 F 即 I ~ = F ( I ) = F ∗ I \mathcal F即\tilde I=\mathcal F(I)=F*I F即I~=F(I)=F∗I来求得正常亮度的输出 I ~ \tilde I I~,而在实际操作时,作者并不是直接去求 F F F,而是求 F F F的逆S,即 S − 1 = F S^{-1}=F S−1=F。
I ~ = F ( I ) = S − 1 ∗ I (1) \tilde I = \mathcal F(I)=S^{-1}*I \tag1 I~=F(I)=S−1∗I(1)
即S可视为光照估计。因为作者认为光照的形式比较简单,更容易学习。。(按照retinex理论的话,这个S就类似于对低光照图像的亮度补偿??有空再去看相关论文)
Loss:
L = ∑ i = 1 N w r L r i + w s L s i + w c L c i (2) \mathcal L=\sum_{i=1}^N w_r\mathcal L_r^i+w_s\mathcal L_s^i+w_c\mathcal L_c^i \tag2 L=i=1∑NwrLri+wsLsi+wcLci(2)
Reconstruction Loss:
L r = ∣ ∣ I − S ∗ I ~ ∣ ∣ 2 s . t . ( I ) c ≤ ( S ) c ≤ 1 , ∀ c h a n n e l c (3) \mathcal L_r=||I-S*\tilde I||^2 \\ s.t. (I)_c \leq (S)_c \leq 1,\forall channel \ \ c \tag3 Lr=∣∣I−S∗I~∣∣2s.t.(I)c≤(S)c≤1,∀channel c(3)
L r \mathcal L_r Lr定义如(3),其中 I , I ~ I,\tilde I I,I~被压缩至[0,1]。因为该loss的优化方向是使得 I ~ = I / S \tilde I=I/ S I~=I/S为了确保 I ~ \tilde I I~不越界(不大于1),所以 ( I ) c ≤ ( S ) c (I)_c \leq (S)_c (I)c≤(S)c。又因为目标是暗光增强,即 I ~ ≥ I \tilde I \ge I I~≥I,因此需要 ( S ) c ≤ 1 (S)_c \leq 1 (S)c≤1。其中c为通道,该网络在RGB三个通道上分别处理。
Smoothness Loss:
L s = ∑ p ∑ c w x , c p ( ∂ x S p ) c 2 + w y , c p ( ∂ y S p ) c 2 w x , c p = ( ∣ ∂ x L i p ∣ c θ + ϵ ) − 1 w y , c p = ( ∣ ∂ y L i p ∣ c θ + ϵ ) − 1 (4) \mathcal L_s=\sum_p \sum_c w_{x,c}^p(\partial_x S_p)^2_c+ w_{y,c}^p(\partial_y S_p)^2_c\\ w_{x,c}^p=(|\partial_x L_i^p|_c^\theta+\epsilon)^{-1} \\ w_{y,c}^p=(|\partial_y L_i^p|_c^\theta+\epsilon)^{-1} \tag4 Ls=p∑c∑wx,cp(∂xSp)c2+wy,cp(∂ySp)c2wx,cp=(∣∂xLip∣cθ+ϵ)−1wy,cp=(∣∂yLip∣cθ+ϵ)−1(4)
L s \mathcal L_s Ls和retinex一样为光照平滑loss, p p p为坐标值。通过对 S S S的水平梯度和竖直梯度增加loss限制,使得学到的S平滑。
其中 w w w为权重, L L L为原图的像素值,经 log \log log函数进行了压缩。即在原图中,亮度值变化小的地方权重大(即光照图平滑),亮度值变化大的地方权重小(loss小,光照图不平滑)。It is intriguing to note that for underexposed photos, image content and details are often weak. Large gradients are more likely incurred by inconsistent illumination。即梯度变化大的地方,应该就是光照不连续的地方。
Color Loss:
L c = ∑ p ∠ ( ( F ( i ) ) p , ( I ~ ) p ) (5) \mathcal L_c=\sum_p \angle((\mathcal F(i))_p,(\tilde I)_p) \tag5 Lc=p∑∠((F(i))p,(I~)p)(5)
即 F ( I ) \mathcal F(I) F(I)为网络输出结果, I ~ \tilde I I~为专家修图结果(ground truth)。两者根据角度计算loss,因为 F ( I ) p \mathcal F(I)_p F(I)p和 I ~ p \tilde I_p I~p分别为一个三维向量(RGB)。计算这两个向量的angle作为loss。以angle作为loss而不是计算L2 loss的原因为:
- 在Reconstruction Loss中已经蕴含了L2 loss在里面了。
- L2 loss的优化方向并不能保证 color vectors have the same direction。可能带来颜色失真。
Result
