分布式缓存——Redis集群
一、单点Redis的问题
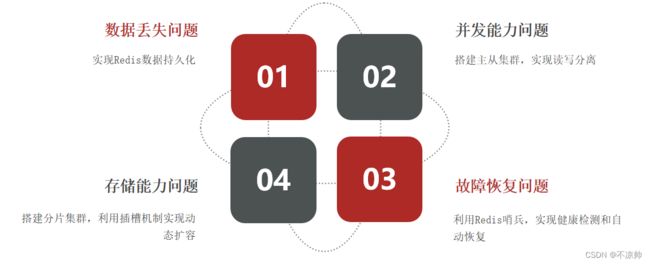
主要有以下几个问题:
- 数据丢失问题。Redis是内存存储,服务重启可能会丢失数据。
- 并发能力问题。单节点Redis并发能力虽然不错,但也无法满足如618、双11这样的高并发场景。
- 故障恢复问题。如果Redis宕机,则服务不可用,需要一种自动的故障恢复手段。
- 存储能力问题。Redis基于内存,单节点能存储的数据量难以满足海量数据需求。
二、Redis持久化
1.RDB持久化
RDB全称Redis Database Backup file(Redis数据备份文件),也被叫做Redis数据快照。简单来说就是把内存中的所有数据都记录到磁盘中。当Redis实例故障重启后,从磁盘读取快照文件,恢复数据。
快照文件称为RDB文件,默认是保存在当前运行目录。Redis停机时会执行一次RDB。
Redis内部有触发RDB的机制,可以在redis.conf文件中找到,格式如下:

RDB的其它配置也可以在redis.conf文件中设置:

bgsave开始时会fork主进程得到子进程,子进程共享主进程的内存数据。完成fork后读取内存数据并写入 RDB 文件。 fork采用的是copy-on-write技术:
- 当主进程执行读操作时,访问共享内存;
- 当主进程执行写操作时,则会拷贝一份数据,执行写操作。
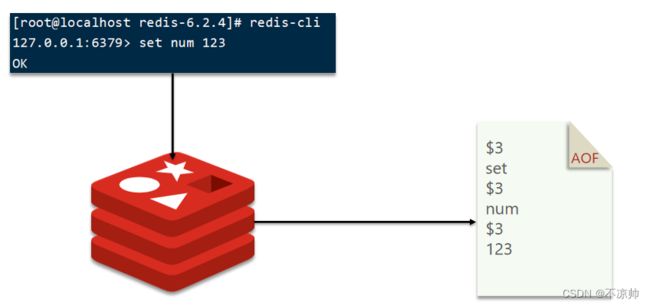
2.AOF持久化
AOF全称为Append Only File(追加文件)。Redis处理的每一个写命令都会记录在AOF文件,可以看做是命令日志文件。
AOF默认是关闭的,需要修改redis.conf配置文件来开启AOF:

AOF的命令记录的频率也可以通过redis.conf文件来配:

| 配置项 |
刷盘时机 |
优点 |
缺点 |
| Always |
同步刷盘 |
可靠性高,几乎不丢数据 |
性能影响大 |
| everysec |
每秒刷盘 |
性能适中 |
最多丢失1秒数据 |
| no |
操作系统控制 |
性能最好 |
可靠性较差,可能丢失大量数据 |
Redis也会在触发阈值时自动去重写AOF文件。阈值也可以在redis.conf中配置:

3.开发时的小总结
RDB和AOF各有自己的优缺点,如果对数据安全性要求较高,在实际开发中往往会结合两者来使用。
| RDB |
AOF |
|
| 持久化方式 |
定时对整个内存做快照 |
记录每一次执行的命令 |
| 数据完整性 |
不完整,两次备份之间会丢失 |
相对完整,取决于刷盘策略 |
| 文件大小 |
会有压缩,文件体积小 |
记录命令,文件体积很大 |
| 宕机恢复速度 |
很快 |
慢 |
| 数据恢复优先级 |
低,因为数据完整性不如AOF |
高,因为数据完整性更高 |
| 系统资源占用 |
高,大量CPU和内存消耗 |
低,主要是磁盘IO资源 但AOF重写时会占用大量CPU和内存资源 |
| 使用场景 |
可以容忍数分钟的数据丢失,追求更快的启动速度 |
对数据安全性要求较高常见 |
三、Redis主从
1.搭建主从架构
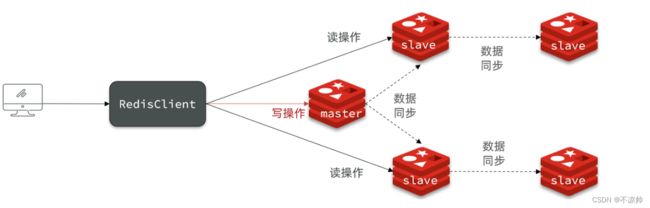
单节点Redis的并发能力是有上限的,要进一步提高Redis的并发能力,就需要搭建主从集群,实现读写分离。

1)集群结构
具体的Docker安装Redis教程:https://blog.csdn.net/yueyue763184/article/details/127731964?spm=1001.2014.3001.5501
这里在同一台虚拟机中开启3个redis实例,模拟主从集群,信息如下:
| IP |
PORT |
角色 |
| 192.168.119.130 |
7001 |
master |
| 192.168.119.130 |
7002 |
slave |
| 192.168.119.130 |
7003 |
slave |
Linux防火墙开端口命令:
firewall-cmd --zone=public --add-port=7001/tcp --permanent # 开放7001端口
firewall-cmd --reload # 重新加载
firewall-cmd --zone=public --list-ports # 查看所有开放的端口

2)准备实列和配置
要在同一台虚拟机开启3个实例,必须准备三份不同的配置文件和目录,配置文件所在目录也就是工作目录。创建三个文件夹,名字分别叫7001、7002、7003:
# 进入/tmp目录
cd /tmp
# 创建目录
mkdir 7001 7002 7003
将其redis.conf中的持久化模式改为默认的RDB模式,AOF保持关闭状态:

虚拟机本身有多个IP,为了避免将来混乱,我们需要在redis.conf文件中指定每一个实例的绑定ip信息,格式如下:
# redis实例的声明 IP
replica-announce-ip 192.168.119.130如果主库有密码,要在从库配置文件redis.conf中加入主库密码:
# 主redis数据库的密码
masterauth 123456退出到tmp目录中将7001的redis.conf配置复制到7002、7003中:
cp 7001/redis.conf 7002
使用Docker启动命令(只以7001为例):
docker run -itd --name redis7001 --privileged=true --restart=always --log-opt max-size=100m --log-opt max-file=2 -p 7001:6379 -v /tmp/7001/redis.conf:/etc/redis/redis.conf -v /tmp/7001/data:/data redis redis-server /etc/redis/redis.conf --appendonly yes --requirepass 123456【 --restart=always】 开机启动,失败也会一直重启;
【–log-opt max-size=100m】意味着一个容器日志大小上限是100M;
【–log-opt max-file=2】意味着一个容器有2个日志,分别是id+.json、id+1.json;
【-p 6379:6379】 将宿主机6379端口与容器内6379端口进行映射;
【-v】 将宿主机目录或文件与容器内目录或文件进行挂载映射;
【-itd】
i:以交互模式运行容器,通常与 -t 同时使用;
t:为容器重新分配一个伪输入终端,通常与 -i 同时使用;
d:表示后台启动redis;
【–name】 给容器命名;
【–appendonly yes】 开启redis 持久化;
【–requirepass 123456】 强烈建议设置密码,并且将密码设置为高强度复杂;
【redis-server /etc/redis/redis.conf】 以配置文件启动redis,加载容器内的conf文件;
启动成功:


3)开启主从关系
现在三个实例还没有任何关系,要配置主从可以使用replicaof 或者slaveof(5.0以前)命令。
有临时和永久两种模式:
-
修改配置文件(永久生效)
在redis.conf中添加一行配置:slaveof -
使用redis-cli客户端连接到redis服务,执行slaveof命令(重启后失效):
slaveof
注意:在5.0以后新增命令replicaof,与salveof效果一致。
首先进入7002,7003容器,添加临时的主从配置关系
docker exec -it redis7002 redis-cli
auth 123456
replicaof 192.168.119.130 7001
再进入主库7001查看消息:
info replication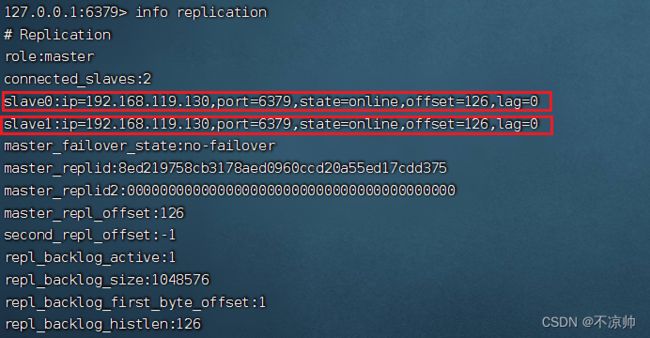 随后可以去主库添加数据测试一下。
随后可以去主库添加数据测试一下。
2.主从数据同步原理
1)全量同步
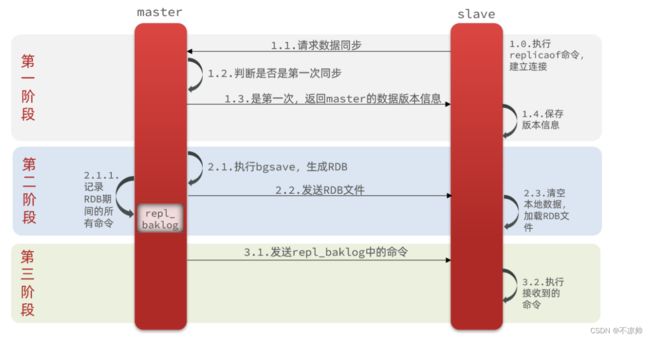
主从第一次建立连接时,会执行全量同步,将master节点的所有数据都拷贝给slave节点,流程:
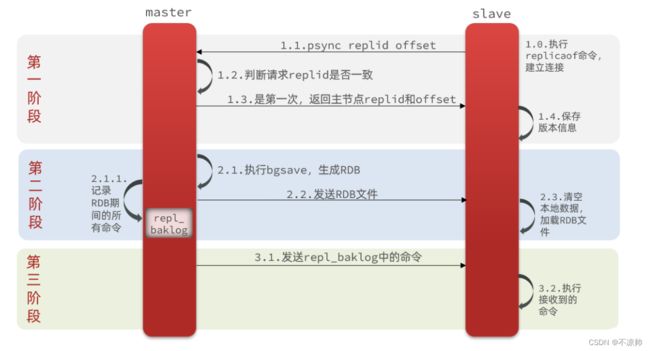
master如何得知salve是第一次来连接呢??
有几个概念,可以作为判断依据:
-
Replication Id:简称replid,是数据集的标记,id一致则说明是同一数据集。每一个master都有唯一的replid,slave则会继承master节点的replid。
-
offset:偏移量,随着记录在repl_baklog中的数据增多而逐渐增大。slave完成同步时也会记录当前同步的offset。如果slave的offset小于master的offset,说明slave数据落后于master,需要更新。
因此slave做数据同步,必须向master声明自己的replication id 和offset,master才可以判断到底需要同步哪些数据。因为slave原本也是一个master,有自己的replid和offset,当第一次变成slave,与master建立连接时,发送的replid和offset是自己的replid和offset。master判断发现slave发送来的replid与自己的不一致,说明这是一个全新的slave,就知道要做全量同步了。
master会将自己的replid和offset都发送给这个slave,slave保存这些信息。以后slave的replid就与master一致了。因此,master判断一个节点是否是第一次同步的依据,就是看replid是否一致。如图:
完整流程描述:
-
slave节点请求增量同步
-
master节点判断replid,发现不一致,拒绝增量同步
-
master将完整内存数据生成RDB,发送RDB到slave
-
slave清空本地数据,加载master的RDB
-
master将RDB期间的命令记录在repl_baklog,并持续将log中的命令发送给slave
-
slave执行接收到的命令,保持与master之间的同步
2)增量同步
全量同步需要先做RDB,然后将RDB文件通过网络传输个slave,成本太高了。因此除了第一次做全量同步,其它大多数时候slave与master都是做增量同步。
什么是增量同步?就是只更新slave与master存在差异的部分数据。如图:
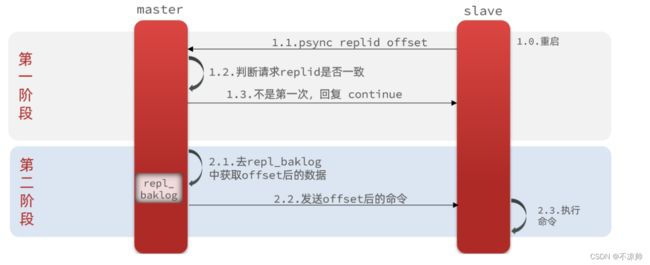
3)repl_backlog原理
master怎么知道slave与自己的数据差异在哪里呢?这就要说到全量同步时的repl_baklog文件了。
这个文件是一个固定大小的数组,只不过数组是环形,也就是说角标到达数组末尾后,会再次从0开始读写,这样数组头部的数据就会被覆盖。
repl_baklog中会记录Redis处理过的命令日志及offset,包括master当前的offset,和slave已经拷贝到的offset:
slave与master的offset之间的差异,就是salve需要增量拷贝的数据了。
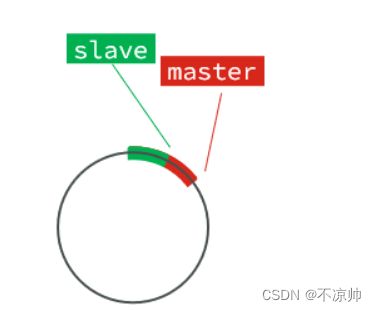
随着不断有数据写入,master的offset逐渐变大,slave也不断的拷贝,追赶master的offset:
此时,如果有新的数据写入,就会覆盖数组中的旧数据。不过,旧的数据只要是绿色的,说明是已经被同步到slave的数据,即便被覆盖了也没什么影响。因为未同步的仅仅是红色部分。
3.主从同步优化
主从同步可以保证主从数据的一致性,非常重要。
可以从以下几个方面来优化Redis主从就集群:
-
在master中配置repl-diskless-sync yes启用无磁盘复制,避免全量同步时的磁盘IO。
-
Redis单节点上的内存占用不要太大,减少RDB导致的过多磁盘IO
-
适当提高repl_baklog的大小,发现slave宕机时尽快实现故障恢复,尽可能避免全量同步
-
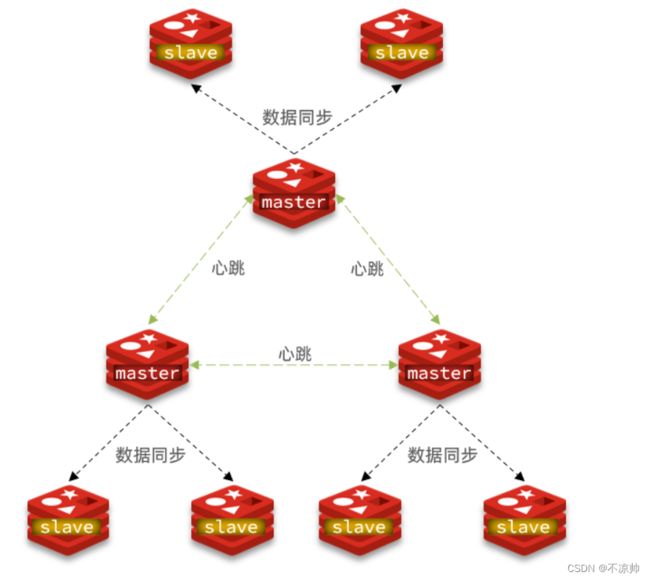
限制一个master上的slave节点数量,如果实在是太多slave,则可以采用主-从-从链式结构,减少master压力
主从从架构图:
三、Redis哨兵
1.哨兵的作用和原理
1)集群结构和作用
Redis提供了哨兵(Sentinel)机制来实现主从集群的自动故障恢复。 哨兵的结构如图:
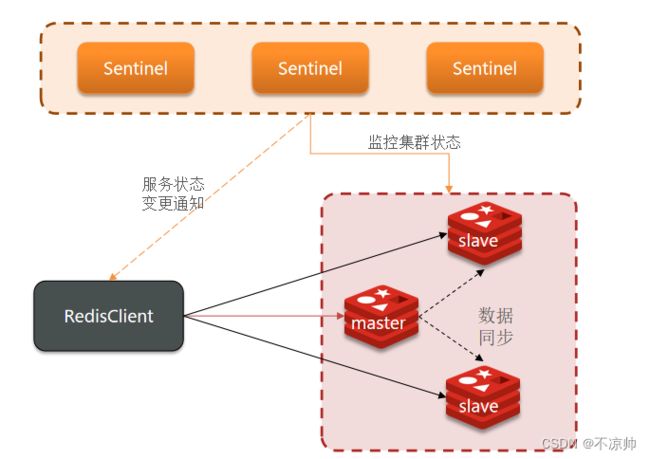
Sentinel 哨兵的作用如下:
-
监控:Sentinel 会不断检查您的master和slave是否按预期工作
-
自动故障恢复:如果master故障,Sentinel会将一个slave提升为master。当故障实例恢复后也以新的master为主
-
通知:Sentinel充当Redis客户端的服务发现来源,当集群发生故障转移时,会将最新信息推送给Redis的客户端
2)集群监控原理
Sentinel基于心跳机制监测服务状态,每隔1秒向集群的每个实例发送ping命令:
- 主观下线:如果某sentinel节点发现某实例未在规定时间响应,则认为该实例主观下线。
- 客观下线:若超过指定数量(quorum)的sentinel都认为该实例主观下线,则该实例客观下线。quorum值最好超过Sentinel实例数量的一半。

3)集群故障恢复原理
一旦发现master故障,sentinel需要在salve中选择一个作为新的master,选择依据是这样的:
-
首先会判断slave节点与master节点断开时间长短,如果超过指定值(down-after-milliseconds * 10)则会排除该slave节点
-
然后判断slave节点的slave-priority值,越小优先级越高,如果是0则永不参与选举
-
如果slave-prority一样,则判断slave节点的offset值,越大说明数据越新,优先级越高
-
最后是判断slave节点的运行id大小,越小优先级越高。
当选出一个新的master后,该如何实现切换呢?流程如下:
-
sentinel给备选的slave1节点发送slaveof no one命令,让该节点成为master
-
sentinel给所有其它slave发送slaveof 192.168.150.101 7002 命令,让这些slave成为新master的从节点,开始从新的master上同步数据。
-
最后,sentinel将故障节点标记为slave,当故障节点恢复后会自动成为新的master的slave节点

2.搭建哨兵集群
sentinel.conf配置文件:
port 27001
sentinel announce-ip 192.168.119.130
sentinel monitor mymaster 192.168.119.130 7001 2
sentinel auth-pass mymaster 123456
sentinel down-after-milliseconds mymaster 5000
sentinel failover-timeout mymaster 60000
dir "/tmp/s1"
其他细节可参考:https://blog.csdn.net/dongrixueyang/article/details/121632074
3.RedisTemplate的哨兵模式
Sentinel集群监管下的Redis主从集群,其节点会因为自动故障转移而发生变化,Redis的客户端必须感知这种变化,及时更新连接信息。Spring的RedisTemplate底层利用lettuce实现了节点的感知和自动切换。
在pom.xml文件中引入:
org.springframework.boot
spring-boot-starter-data-redis
在配置文件application.yml中指定redis的sentinel相关信息:
spring:
redis:
sentinel:
master: mymaster
nodes:
- 192.168.119.130:27001
- 192.168.119.130:27002
- 192.168.119.130:27003在项目的启动类中,添加一个新的bean:
@Bean
public LettuceClientConfigurationBuilderCustomizer clientConfigurationBuilderCustomizer(){
return clientConfigurationBuilder -> clientConfigurationBuilder.readFrom(ReadFrom.REPLICA_PREFERRED);
}这个bean中配置的就是读写策略,包括四种:
-
MASTER:从主节点读取
-
MASTER_PREFERRED:优先从master节点读取,master不可用才读取replica
-
REPLICA:从slave(replica)节点读取
-
REPLICA _PREFERRED:优先从slave(replica)节点读取,所有的slave都不可用才读取master
四、Redis分片集群简单了解
主从和哨兵可以解决高可用、高并发读的问题。但是依然有两个问题没有解决:
-
海量数据存储问题
-
高并发写的问题
使用分片集群可以解决上述问题,分片集群特征:
-
集群中有多个master,每个master保存不同数据
-
每个master都可以有多个slave节点
-
master之间通过ping监测彼此健康状态
-
客户端请求可以访问集群任意节点,最终都会被转发到正确节点