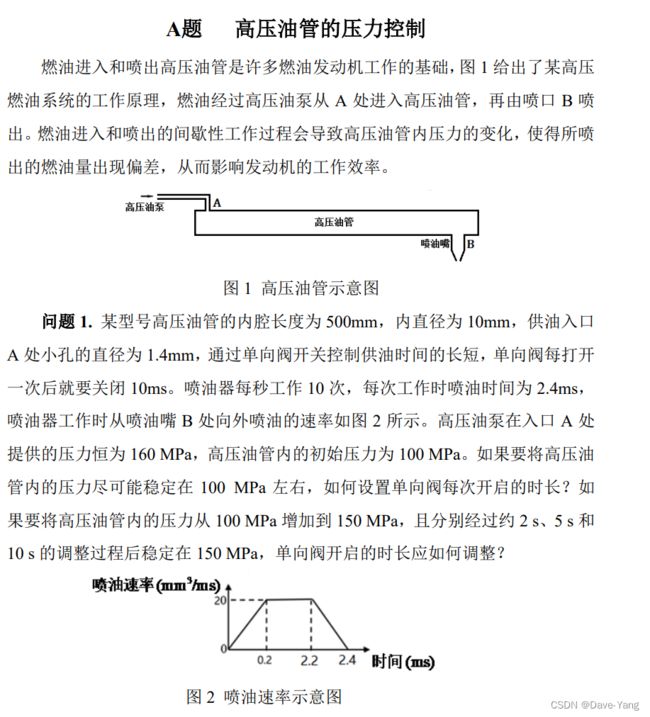
问题背景
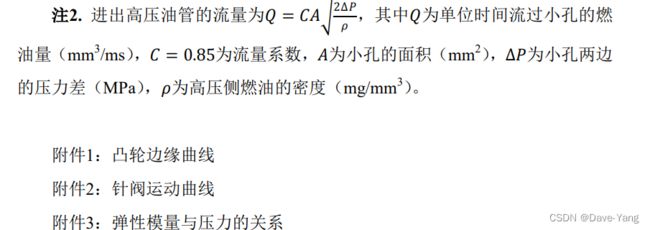
各参数计算公式
弹性模量计算压力
function k = E2P(P,E)
k = polyfit(P,E,2);
end
进油公式
function Q = Q_in(P1,P2,rho,t,T)
%% 仿真时间t时刻的进油量流量函数
C = 0.85;
A = pi*1.4*1.4/4;
t_convert = mod(t,T+10);
if t_convert <= T
Q = C*A*sqrt(2*(P1-P2)/rho);
else
Q = 0;
end
end
出油公式
function Q = Q_out(t)
%% 仿真时间t时刻的出油量流量函数
% 假设喷油嘴每秒以均匀频率工作10次,此时喷油量可看作周期函数
t_convert = mod(t,100); % 周期转换
if t_convert <= 0.2 && t_convert >= 0
Q = 100*t_convert;
elseif 0.2
欧拉法计算密度
function rho = rho_iter(rho0,dP,E,P)
if P > 100
rho = rho0*(1+dP/E);
else
rho = rho0*(1-dP/E);
end
end
密度计算压力
clear;clc
data = readmatrix('附件3-弹性模量与压力.xlsx','Range','A2:B402');
P = data(:,1);
E = data(:,2);
rho = zeros(size(P));
ind = find(P==100);
rho(ind) = 0.85;
n = length(P);
dP = mean(diff(P,1));
for i = ind:n-1
rho(i+1) = rho_iter(rho(i),dP,E(i),P(i));
end
for i = ind:-1:2
rho(i-1) = rho_iter(rho(i),dP,E(i),P(i));
end
k = polyfit(rho,P,2);
P_test = k(1)*rho.^2+k(2)*rho+k(3);
plot(rho,P)
hold on
plot(rho,P_test)
function P = rho2P(rho)
k = [10952.7722859703,-15955.0071828209,5749.08734491654];
P = k(1)*rho.^2+k(2)*rho+k(3);
end
压力计算
function [P,rho,M] = P_vessel(P1,P2,t,T,rho1,rho2,M,V,Qout,dt)
Qin = Q_in(P1,P2,rho1,t,T);
M = M+dt*rho1*Qin-dt*rho2*Qout;
rho = M/V;
P = rho2P(rho);
end
各时刻压力仿真计算
function [t,P] = pipe_sim(P0,T,t_sim)
%% 基本参数设置
% 油管参数
L = 500; % 油管长度
d_pipe = 10; % 油管直径
V = L*pi*(d_pipe/2)^2; % 油管体积
% 仿真时间参数
dt = 0.1;
t = 0:dt:t_sim; t = t';
% 状态量参数
rho0 = 0.8707;
Qout = zeros(size(t)); % 出油量
P = zeros(size(t)); P(1) = 100; % 管内压力
rho = zeros(size(t)); rho(1) = 0.85; % 管内燃油密度
M = zeros(size(t)); M(1) = rho(1)*V; % 管内燃油质量
for i = 1:length(t)
Qout(i) = Q_out(i);
end
for i = 1:length(t)-1
[P(i+1),rho(i+1),M(i+1)] = P_vessel(P0,P(i),t(i),T,rho0,rho(i),M(i),V,Qout(i),dt);
end
end
粒子群法计算单次阀门开启时间
function [e,T] = scope_T(P_target,t_sim,P0)
%% 粒子群算法中的预设参数
n = 10; % 粒子数量
narvs = 1; % 变量个数
c1 = 2; % 每个粒子的个体学习因子,也称为个体加速常数
c2 = 2; % 每个粒子的社会学习因子,也称为社会加速常数
w = 0.9; % 惯性权重
K = 50; % 迭代的次数
vmax = 1.2; % 粒子的最大速度
x_lb = 0; % x的下界
x_ub = 1; % x的上界
%% 初始化粒子的位置和速度
x = zeros(n,narvs);
for m = 1: narvs
x(:,m) = x_lb(m) + (x_ub(m)-x_lb(m))*rand(n,1);
end
v = -vmax + 2*vmax .* rand(n,narvs);
%% 计算适应度
fit = zeros(n,1);
for m = 1:n
fit(m) = Obj_fun(P0,x(m,:),t_sim,P_target);
end
pbest = x;
ind = find(fit == max(fit), 1);
gbest = x(ind,:);
%% 迭代K次来更新速度与位置
fitnessbest = ones(K,1);
for d = 1:K
for m = 1:n
v(m,:) = w*v(m,:) + c1*rand(1)*(pbest(m,:) - x(m,:)) + c2*rand(1)*(gbest - x(m,:)); % 更新第i个粒子的速度
% 如果粒子的速度超过了最大速度限制,就对其进行调整
for j = 1: narvs
if v(m,j) < -vmax(j)
v(m,j) = -vmax(j);
elseif v(m,j) > vmax(j)
v(m,j) = vmax(j);
end
end
x(m,:) = x(m,:) + v(m,:); % 更新第i个粒子的位置
% 如果粒子的位置超出了定义域,就对其进行调整
for j = 1: narvs
if x(m,j) < x_lb(j)
x(m,j) = x_lb(j);
elseif x(m,j) > x_ub(j)
x(m,j) = x_ub(j);
end
end
fit(m) = Obj_fun(P0,x(m,:),t_sim,P_target);
if fit(m) > Obj_fun(P0,pbest(m,:),t_sim,P_target)
pbest(m,:) = x(m,:);
end
if fit(m) > Obj_fun(P0,gbest,t_sim,P_target)
gbest = pbest(m,:);
end
end
fitnessbest(d) = Obj_fun(P0,gbest,t_sim,P_target);
end
T = gbest;
e = fitnessbest;
end
function e = Obj_fun(P0,x,t_sim,P_target)
[~,P] = pipe_sim(P0,x,t_sim);
P_mean = mean(P(80000:100000));
e = -abs(P_mean-P_target);
end
仿真过程
clear;clc
%% 仿真过程
t_sim = 10000;
P0 = 160;
P_target = input('请输入稳定时的压强:');
[e,T] = scope_T(P_target,t_sim,P0); e = -e;
[t,P] = pipe_sim(P0,T,t_sim);
%% 作图
figure(1)
plot(t,P,'k')
xlabel('时间/ms')
ylabel('压力/MPa')
axis([0 t_sim 0 200])
figure(2)
plot(e,'k')
xlabel('迭代次数')
ylabel('误差')