【雕爷学编程】MicroPython手册之达芬奇 TKM32F499 使用参考

MicroPython是为了在嵌入式系统中运行Python 3编程语言而设计的轻量级版本解释器。与常规Python相比,MicroPython解释器体积小(仅100KB左右),通过编译成二进制Executable文件运行,执行效率较高。它使用了轻量级的垃圾回收机制并移除了大部分Python标准库,以适应资源限制的微控制器。
MicroPython主要特点包括:
1、语法和功能与标准Python兼容,易学易用。支持Python大多数核心语法。
2、对硬件直接访问和控制,像Arduino一样控制GPIO、I2C、SPI等。
3、强大的模块系统,提供文件系统、网络、图形界面等功能。
4、支持交叉编译生成高效的原生代码,速度比解释器快10-100倍。
5、代码量少,内存占用小,适合运行在MCU和内存小的开发板上。
6、开源许可,免费使用。Shell交互环境为开发测试提供便利。
7、内置I/O驱动支持大量微控制器平台,如ESP8266、ESP32、STM32、micro:bit、掌控板和PyBoard等。有活跃的社区。
MicroPython的应用场景包括:
1、为嵌入式产品快速构建原型和用户交互。
2、制作一些小型的可 programmable 硬件项目。
3、作为教育工具,帮助初学者学习Python和物联网编程。
4、构建智能设备固件,实现高级控制和云连接。
5、各种微控制器应用如物联网、嵌入式智能、机器人等。
使用MicroPython需要注意:
1、内存和Flash空间有限。
2、解释执行效率不如C语言。
3、部分库函数与标准版有差异。
4、针对平台优化语法,订正与标准Python的差异。
5、合理使用内存资源,避免频繁分配大内存块。
6、利用原生代码提升速度关键部位的性能。
7、适当使用抽象来封装底层硬件操作。
总体来说,MicroPython让Python进入了微控制器领域,是一项重要的创新,既降低了编程门槛,又提供了良好的硬件控制能力。非常适合各类物联网和智能硬件的开发。
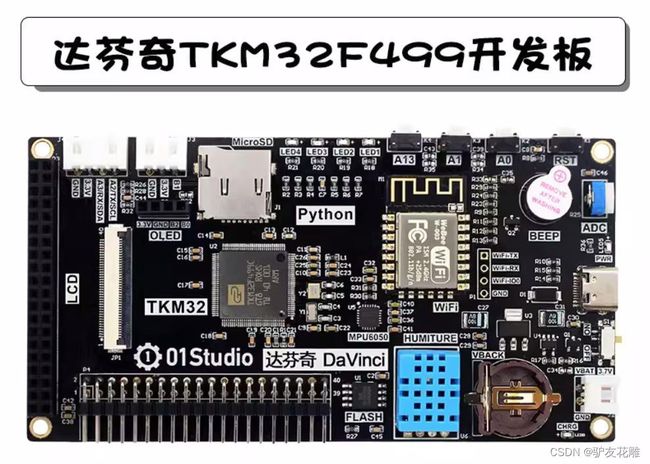
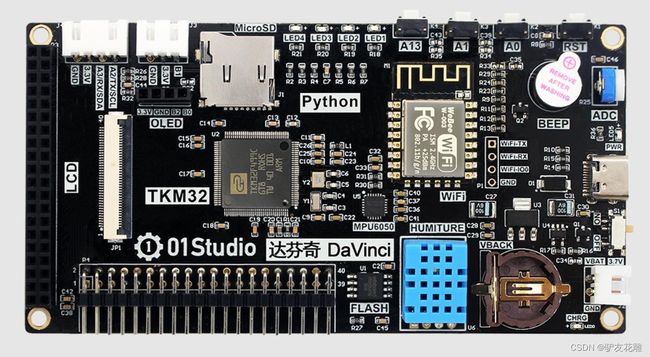
达芬奇 TKM32F499是一款基于ARM Cortex-M4内核的微控制器,以下是其主要的参考技术参数:
1、内核和性能:
内核: ARM Cortex-M4
最高主频: 240 MHz
性能: 225 DMIPS / 608 CoreMark
2、存储器:
Flash存储器: 1 MB
RAM: 192 KB
存储器接口: 支持外部存储器扩展(例如,SD卡,NOR Flash等)
3、外设接口:
通用IO口(GPIO): 支持多达 101 个GPIO引脚,可用于数字输入/输出、中断等。
串行通信接口: 包括多个UART、SPI、I2C接口,用于与外部设备进行通信。
USB接口: 支持USB 2.0 FS(全速)。
定时器: 包括多个定时器/计数器,可用于定时、脉冲宽度调制(PWM)等应用。
ADC和DAC: 内置多个模数转换器(ADC)和数模转换器(DAC),用于模拟信号的采集和输出。
LCD控制器: 支持液晶显示器(LCD)的控制和驱动。
触摸控制器: 支持电容式触摸屏的控制和输入。
SD卡控制器: 支持SD卡的读写操作。
Ethernet控制器: 支持以太网通信。
4、电源管理:
电源供应: 支持广泛的电源电压范围,包括 3.0V 至 3.6V 的工作电压。
低功耗模式: 支持多种低功耗模式,以最小化功耗。
5、安全性:
安全特性: 支持硬件加密和解密、随机数生成器等安全功能,保护系统的数据和通信安全。
6、开发工具支持:
开发环境: 支持常见的开发环境,如Keil MDK、IAR Embedded Workbench等。
调试接口: 支持标准的SWD(Serial Wire Debug)调试接口。

MicroPython的达芬奇TKM32F499是一款基于ARM Cortex-M4内核的微控制器,下面将以专业的视角为您详细解释其主要特点、应用场景以及需要注意的事项。
主要特点:
高性能处理器:达芬奇TKM32F499采用ARM Cortex-M4内核,主频可达240 MHz,具备较高的处理能力和运算速度,适用于需要快速响应和复杂计算的应用。
大容量存储器:该微控制器内置1 MB Flash存储器和192 KB RAM,提供充足的存储空间用于存储应用程序代码、数据和变量。
多种外设接口:达芬奇TKM32F499支持丰富的外设接口,包括多个UART、SPI、I2C接口用于与其他设备进行通信,USB接口用于连接外部设备,定时器用于定时和PWM控制,ADC和DAC用于模拟信号的采集和输出,LCD控制器和触摸控制器用于图形界面和触摸输入等。
强大的安全性:该微控制器提供硬件加密和解密功能,随机数生成器等安全特性,可以保护系统的数据和通信安全。
应用场景:
嵌入式系统开发:达芬奇TKM32F499适用于嵌入式系统的开发,如智能家居控制系统、工业自动化设备、消费电子产品等。它的高性能和丰富的外设接口使得开发者可以实现各种功能和交互式界面。
物联网(IoT)应用:由于该微控制器具备低功耗模式和丰富的通信接口(如UART、SPI、I2C、Ethernet等),它非常适合用于物联网应用中的节点设备,如传感器节点、智能设备等。
学习和教育:MicroPython的达芬奇TKM32F499对于学习和教育也是一个理想的平台。它可以用于教学实验、编程学习以及原型开发,帮助学生和爱好者快速入门嵌入式系统开发。
需要注意的事项:
开发工具和环境:在使用MicroPython的达芬奇TKM32F499进行开发时,需要选择适合的开发环境,如MicroPython官方提供的开发工具链。同时,了解和熟悉相关的开发工具和文档,以便更好地进行开发和调试。
资源管理:由于该微控制器的存储器和性能有限,开发者需要合理管理资源,包括存储空间和计算能力。避免过度使用存储器和处理器,以确保系统的稳定性和性能。
电源管理:在设计电源供应方案时,需要考虑达芬奇TKM32F499的工作电压范围和功耗要求,选择合适的电源电压和稳定性,以确保正常运行和系统的可靠性。
综上所述,MicroPython的达芬奇TKM32F499是一款功能强大的微控制器,具备高性能处理器、大容量存储器、多种外设接口和强大的安全性。它适用于嵌入式系统开发、物联网应用以及学习和教育等领域。在使用时需要注意选择合适的开发工具和环境,合理管理资源以及设计适当的电源供应方案。
案例一:使用MicroPython控制达芬奇 TKM32F499的LED灯闪烁
from machine import Pin
import time
# 初始化LED引脚
led = Pin(13, Pin.OUT)
while True:
# 点亮LED灯
led.value(1)
time.sleep(1)
# 熄灭LED灯
led.value(0)
time.sleep(1)
要点解读:
导入所需的库和模块。
初始化LED引脚,这里使用的是TKM32F499的GPIO13引脚。
使用一个无限循环来控制LED灯的亮灭。
在循环中,首先将LED引脚的值设置为1(点亮LED灯),然后延时1秒。
接着将LED引脚的值设置为0(熄灭LED灯),然后延时1秒。
循环继续进行,实现LED灯的持续闪烁。
案例二:使用MicroPython读取达芬奇 TKM32F499的温度传感器数据
from machine import Pin, I2C
import time
import dht
# 初始化I2C接口和温度传感器
i2c = I2C(scl=Pin(2), sda=Pin(3))
dht_sensor = dht.DHT11(Pin(4))
while True:
# 读取温度传感器数据
humidity, temperature = dht_sensor.read()
# 如果读取成功,打印温度和湿度值
if humidity is not None and temperature is not None:
print("温度:{:.1f}℃,湿度:{:.1f}%".format(temperature, humidity))
else:
print("无法读取温度传感器数据")
# 延时1秒后继续循环
time.sleep(1)
要点解读:
导入所需的库和模块。
初始化I2C接口和温度传感器,这里使用的是TKM32F499的I2C接口和DHT11温度传感器。
使用一个无限循环来读取温度传感器的数据。
在循环中,首先调用dht_sensor.read()方法读取温度和湿度值。
如果读取成功,打印温度和湿度值;否则,打印无法读取温度传感器数据的提示信息。
循环继续进行,实现温度传感器数据的实时读取和显示。
延时1秒后继续循环,避免频繁读取导致CPU占用过高。
案例三:使用MicroPython控制达芬奇 TKM32F499的LCD显示屏显示当前时间
from machine import Pin, I2C
import time
import ssd1306
# 初始化I2C接口和OLED显示屏
i2c = I2C(scl=Pin(5), sda=Pin(4))
oled = ssd1306.SSD1306_I2C(128, 64, i2c)
# 清空屏幕并显示
oled.fill(0)
oled.show()
while True:
# 获取当前时间
current_time = time.localtime()
# 格式化时间字符串
time_str = time.strftime("%Y-%m-%d %H:%M:%S", current_time)
# 在屏幕上显示时间
oled.text("当前时间:", 0, 0)
oled.text(time_str, 0, 10)
oled.show()
# 延时1秒后继续循环
time.sleep(1)
要点解读:
导入所需的库和模块。
初始化I2C接口和OLED显示屏,这里使用的是TKM32F499的I2C接口和SSD1306 OLED显示屏。
清空屏幕并显示。
使用一个无限循环来控制LCD显示屏的显示内容。
在循环中,首先获取当前时间,然后格式化为字符串。
将格式化后的时间字符串显示在屏幕上,包括标题和实际时间值。
循环继续进行,实现LCD显示屏的实时时间显示。
延时1秒后继续循环,避免频繁更新导致CPU占用过高。

案例四:LED闪烁程序
这个程序将控制TKM32F499板子上的LED灯进行闪烁。
from machine import Pin
import time
# 将LED灯连接到GPIO13上
led = Pin('P1', Pin.OUT)
while True:
led.on() # LED灯亮
time.sleep(1) # 等待1秒
led.off() # LED灯熄
time.sleep(1) # 等待1秒
要点解读:这段代码首先导入了machine和time模块,然后定义了一个GPIO引脚并将其连接到LED灯上。在while循环中,通过调用led.on()和led.off()来控制LED的开关状态,并使用time.sleep()来控制灯的亮灭时间。
案例五:读取按键输入程序
这个程序将读取用户从按键输入的信号。
from machine import Pin
# 将按键连接到GPIO18上
key = Pin('P2', Pin.IN, Pin.PULL_UP)
while True:
if key.value() == 0: # 如果按键被按下
print("Key pressed")
time.sleep(0.1) # 每隔0.1秒检查一次按键状态
要点解读:这段代码首先定义了一个GPIO引脚并将其连接到按键上。在while循环中,通过调用key.value()来获取按键的状态(是否被按下),如果按键被按下,则输出"Key pressed"。使用time.sleep()来控制检查按键状态的时间间隔。
案例六: 使用PWM控制舵机程序
这个程序将使用PWM来控制一个舵机。
from machine import PWM, Pin
import time
# 将PWM通道0连接到舵机上
pwm = PWM(Pin('P3'), freq=50, duty=5000) # 初始化为50%的占空比
try:
while True:
for i in range(10): # 舵机从0度转动到90度
pwm.duty(i * 500) # 改变PWM的占空比来控制舵机转动的角度
time.sleep(0.1) # 每隔0.1秒改变一次PWM的占空比
for i in range(10): # 舵机从90度转动到0度
pwm.duty(10000 - i * 500) # 改变PWM的占空比来控制舵机转动的角度
time.sleep(0.1) # 每隔0.1秒改变一次PWM的占空比
except KeyboardInterrupt:
pass # 如果遇到键盘中断(Ctrl+C),则退出程序
finally:
pwm.deinit() # 最后,关闭PWM通道
要点解读:这段代码首先定义了一个PWM对象并将其连接到舵机上,然后使用for循环来控制舵机的转动角度。在while循环中,通过改变PWM的占空比来控制舵机转动的角度,并使用time.sleep()来控制改变PWM占空比的时间间隔。最后,使用pwm.deinit()来关闭PWM通道。如果遇到键盘中断(如用户按下Ctrl+C),则程序会退出。
案例七:温湿度传感器:使用DHT11模块测量环境温度和湿度,并在LCD屏幕上显示。要点如下:
导入machine和dht模块,创建DHT11对象和LCD对象。
使用dht.read()方法读取温湿度数据,返回一个元组(temperature, humidity)。
使用lcd.printStr()方法在屏幕上打印温湿度数据,设置字体颜色和背景颜色。
使用time.sleep()方法延时一定时间,再重复读取和显示。
from machine import Pin
from dht import DHT11
import tftlcd
import time
dht = DHT11(Pin('C4')) # 创建DHT11对象,连接到C4引脚
lcd = tftlcd.LCD43R() # 创建LCD对象
lcd.fill((255, 255, 255)) # 填充白色背景
while True:
dht.read() # 读取温湿度数据
temp = dht.temperature() # 获取温度值
humi = dht.humidity() # 获取湿度值
lcd.printStr('Temperature: %d C' % temp, 0, 0, (0, 0, 0), (255, 255, 255)) # 在屏幕上打印温度,黑色字体,白色背景
lcd.printStr('Humidity: %d %%' % humi, 0, 20, (0, 0, 0), (255, 255, 255)) # 在屏幕上打印湿度,黑色字体,白色背景
time.sleep(2) # 延时2秒
案例八:蜂鸣器:使用PWM控制蜂鸣器发出不同频率的声音,实现简单的音乐播放。要点如下:
导入machine和pwm模块,创建PWM对象和Pin对象。
定义一个音符列表,每个元素是一个元组(frequency, duration),表示声音的频率和持续时间。
使用for循环遍历音符列表,设置PWM的频率和占空比,使蜂鸣器发声。
使用time.sleep()方法延时一定时间,根据音符的持续时间调整。
使用Pin.off()方法关闭蜂鸣器,避免噪音。
from machine import Pin, PWM
import time
buzzer = PWM(Pin('C4')) # 创建PWM对象,连接到C4引脚
switch = Pin('C5', Pin.OUT) # 创建Pin对象,连接到C5引脚,用于控制蜂鸣器开关
# 定义一个音符列表,每个元素是一个元组(frequency, duration),表示声音的频率和持续时间
notes = [(262, 500), (294, 500), (330, 500), (349, 500), (392, 500), (440, 500), (494, 500), (523, 500)]
switch.on() # 打开蜂鸣器开关
for note in notes: # 遍历音符列表
buzzer.freq(note[0]) # 设置PWM的频率,根据音符的频率
buzzer.duty(512) # 设置PWM的占空比,一半为最大音量
time.sleep(note[1] / 1000) # 延时一定时间,根据音符的持续时间
buzzer.duty(0) # 设置PWM的占空比为0,停止发声
time.sleep(0.1) # 延时0.1秒,作为间隔
switch.off() # 关闭蜂鸣器开关
案例九:舵机控制:使用PWM控制舵机的转动角度,并在LCD屏幕上显示当前角度。要点如下:
导入machine和pwm模块,创建PWM对象和Pin对象。
定义一个角度列表,每个元素是一个整数,表示舵机的目标角度。
使用for循环遍历角度列表,根据角度计算PWM的占空比,使舵机转动到目标角度。
使用lcd.printStr()方法在屏幕上打印当前角度,设置字体颜色和背景颜色。
使用time.sleep()方法延时一定时间,再重复转动和显示。
from machine import Pin, PWM
import time
servo = PWM(Pin('C4'), freq=50) # 创建PWM对象,连接到C4引脚,设置频率为50Hz
switch = Pin('C5', Pin.OUT) # 创建Pin对象,连接到C5引脚,用于控制舵机开关
lcd = tftlcd.LCD43R() # 创建LCD对象
lcd.fill((255, 255, 255)) # 填充白色背景
# 定义一个角度列表,每个元素是一个整数,表示舵机的目标角度
angles = [0, 45, 90, 135, 180]
switch.on() # 打开舵机开关
for angle in angles: # 遍历角度列表
duty = int(40 + angle / 1.8) # 根据角度计算PWM的占空比,40为最小值,180为最大值
servo.duty(duty) # 设置PWM的占空比,使舵机转动到目标角度
lcd.printStr('Servo angle: %d' % angle, 0, 0, (0, 0, 0), (255, 255, 255)) # 在屏幕上打印当前角度,黑色字体,白色背景
time.sleep(1) # 延时1秒
请注意,以上案例只是为了拓展思路,可能存在错误或不适用的情况。不同的硬件平台、使用场景和MicroPython版本可能会导致不同的使用方法。在实际编程中,您需要根据您的硬件配置和具体需求进行调整,并进行多次实际测试。需要正确连接硬件并了解所使用的传感器和设备的规范和特性非常重要。对于涉及到硬件操作的代码,请确保在使用之前充分了解和确认所使用的引脚和电平等参数的正确性和安全性。
