基于形状的零件识别
螺母识别
螺母外轮廓为正六边形,最小外接矩形为正方形,该程序较为简单,判断其外接矩形近似于正方形即为螺母。
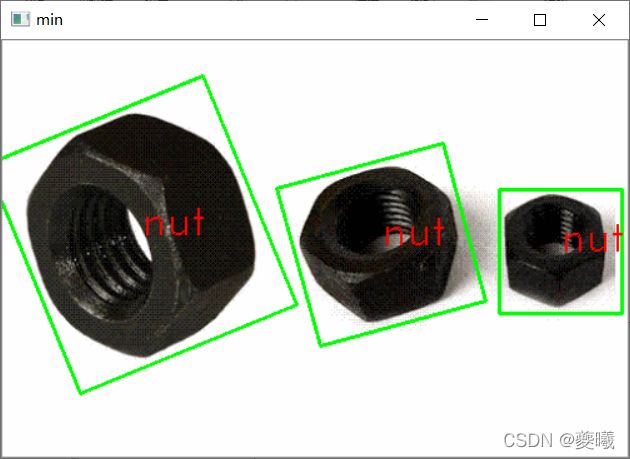

#include 实现方式简单明了,但问题也暴露很明显,例如改变拍照角度影响很大。另外,图像处理方法有待改善,例如背景复杂会导致误识别。
该方法最大的问题就是:只要能识别出近似正方形,该对象就会被认定为螺母。
后面用其他方法继续改进。