【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第四章:正则表达式
文章目录
-
- @[toc]
-
- 前导
-
- 【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第一章:绪论
- 【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第二章:文法
- 【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第三章:有穷状态自动机
- 4.1|启示
- 4.2|正则表达式的形式定义
-
- 正则表达式性质
- 4.3|正则表达式与 F A FA FA等价
-
- 正则表达式表示的语言是正则语言
-
- n = 0 n = 0 n=0时
-
- r = ε r = \varepsilon r=ε
- r = ∅ r = \emptyset r=∅
- ∀ a ∈ Σ \forall a \in \Sigma ∀a∈Σ, r = a r = a r=a
- n = k + 1 n = k + 1 n=k+1时
-
- r = r 1 + r 2 r = r_{1} + r_{2} r=r1+r2
- r = r 1 r 2 r = r_{1} r_{2} r=r1r2
- r = r 1 ∗ r = r_{1}^{*} r=r1∗
- 例题
-
- 问题
- 解答
- 正则语言可以用正则表达式表示
-
- 构造与 D F A DFA DFA等价的正则表达式
- 图上作业方法
-
- 预处理
- 循环操作
- 4.4|正则语言等价模型的总结
文章目录
-
- @[toc]
-
- 前导
-
- 【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第一章:绪论
- 【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第二章:文法
- 【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第三章:有穷状态自动机
- 4.1|启示
- 4.2|正则表达式的形式定义
-
- 正则表达式性质
- 4.3|正则表达式与 F A FA FA等价
-
- 正则表达式表示的语言是正则语言
-
- n = 0 n = 0 n=0时
-
- r = ε r = \varepsilon r=ε
- r = ∅ r = \emptyset r=∅
- ∀ a ∈ Σ \forall a \in \Sigma ∀a∈Σ, r = a r = a r=a
- n = k + 1 n = k + 1 n=k+1时
-
- r = r 1 + r 2 r = r_{1} + r_{2} r=r1+r2
- r = r 1 r 2 r = r_{1} r_{2} r=r1r2
- r = r 1 ∗ r = r_{1}^{*} r=r1∗
- 例题
-
- 问题
- 解答
- 正则语言可以用正则表达式表示
-
- 构造与 D F A DFA DFA等价的正则表达式
- 图上作业方法
-
- 预处理
- 循环操作
- 4.4|正则语言等价模型的总结
前导
【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第一章:绪论
【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第二章:文法
【形式语言与自动机】【《形式语言与自动机理论(第4版)》笔记】第三章:有穷状态自动机
4.1|启示
4.2|正则表达式的形式定义
正则表达式性质
- L ( ( r + ε ) ∗ ) = L ( r ∗ ) L((r + \varepsilon)^{*}) = L(r^{*}) L((r+ε)∗)=L(r∗)
- L ( ( r ∗ s ∗ ) ∗ ) = L ( ( r + s ) ∗ ) L((r^{*} s^{*})^{*}) = L((r + s)^{*}) L((r∗s∗)∗)=L((r+s)∗)
4.3|正则表达式与 F A FA FA等价
正则表达式表示的语言是正则语言
- 施归纳于正则表达式中所含运算符的个数 n n n,证明对于字母表 Σ \Sigma Σ上的任意正则表达式 x x x,存在 F A M FA \ M FA M,使得 L ( M ) = L ( x ) L(M) = L(x) L(M)=L(x),并且 M M M恰有一个终止状态,而且 M M M在终止状态下不做任何移动
n = 0 n = 0 n=0时
r = ε r = \varepsilon r=ε

r = ∅ r = \emptyset r=∅

∀ a ∈ Σ \forall a \in \Sigma ∀a∈Σ, r = a r = a r=a

n = k + 1 n = k + 1 n=k+1时
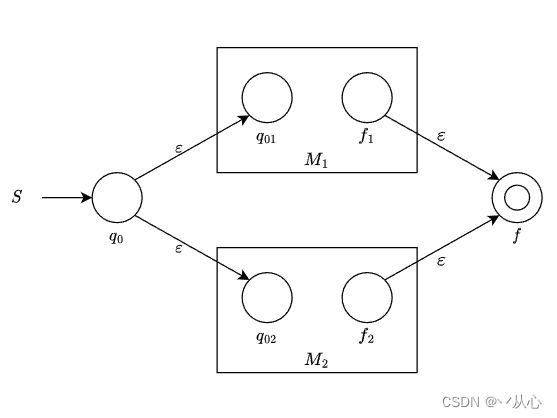
r = r 1 + r 2 r = r_{1} + r_{2} r=r1+r2
- 此时 r 1 r_{1} r1, r 2 r_{2} r2种运算符的个数不会大于 k k k,由归纳假设,存在满足定理要求的 ε − N F A \varepsilon-NFA ε−NFA, M 1 = ( Q 1 , Σ , δ 1 , q 01 , { f 1 } ) M_{1} = (Q_{1} , \Sigma , \delta_{1} , q_{01} , \set{f_{1}}) M1=(Q1,Σ,δ1,q01,{f1}), M 2 = ( Q 2 , Σ , δ 2 , q 02 , { f 2 } ) M_{2} = (Q_{2} , \Sigma , \delta_{2} , q_{02} , \set{f_{2}}) M2=(Q2,Σ,δ2,q02,{f2}),使得 L ( M 1 ) = L ( r 1 ) L(M_{1}) = L(r_{1}) L(M1)=L(r1), L ( M 2 ) = L ( r 2 ) L(M_{2}) = L(r_{2}) L(M2)=L(r2)
- 不妨设 Q 1 ∪ Q 2 = ∅ Q_{1} \cup Q_{2} = \emptyset Q1∪Q2=∅,取 q 0 q_{0} q0, f ∉ Q 1 ∪ Q 2 f \notin Q_{1} \cup Q_{2} f∈/Q1∪Q2,令 M = ( Q 1 ∪ Q 2 ∪ { ( } q 0 , f ) , Σ , δ , q 0 , { f } ) M = (Q_{1} \cup Q_{2} \cup \set(q_{0} , f) , \Sigma , \delta , q_{0} , \set{f}) M=(Q1∪Q2∪{(}q0,f),Σ,δ,q0,{f}),其中 δ \delta δ的定义为
- δ ( q 0 , ε ) = { q 01 , q 02 } \delta(q_{0} , \varepsilon) = \set{q_{01} , q_{02}} δ(q0,ε)={q01,q02}
- 对 ∀ q ∈ Q 1 − { f 1 } \forall q \in Q_{1} - \set{f_{1}} ∀q∈Q1−{f1}, a ∈ Σ ∪ { ε } a \in \Sigma \cup \set{\varepsilon} a∈Σ∪{ε}, δ ( q , a ) = δ 1 ( q , a ) \delta(q , a) = \delta_{1}(q , a) δ(q,a)=δ1(q,a),对 ∀ q ∈ Q 2 − { f 1 } \forall q \in Q_{2} - \set{f_{1}} ∀q∈Q2−{f1}, a ∈ Σ ∪ { ε } a \in \Sigma \cup \set{\varepsilon} a∈Σ∪{ε}, δ ( q , a ) = δ 2 ( q , a ) \delta(q , a) = \delta_{2}(q , a) δ(q,a)=δ2(q,a)
- δ ( f 1 , ε ) = { f } \delta(f_{1} , \varepsilon) = \set{f} δ(f1,ε)={f}
- δ ( f 2 , ε ) = { f } \delta(f_{2} , \varepsilon) = \set{f} δ(f2,ε)={f}
- 往证 L ( r 1 + r 2 ) = L ( M ) L(r_{1} + r_{2}) = L(M) L(r1+r2)=L(M)
- 由归纳假设, L ( r 1 ) = L ( M 1 ) L(r_{1}) = L(M_{1}) L(r1)=L(M1), L ( r 2 ) = L ( M 2 ) L(r_{2}) = L(M_{2}) L(r2)=L(M2),根据正则表达式的定义 L ( r 1 + r 2 ) = L ( r 1 ) ∪ L ( r 2 ) L(r_{1} + r_{2}) = L(r_{1}) \cup L(r_{2}) L(r1+r2)=L(r1)∪L(r2), L ( r 1 + r 2 ) = L ( M 1 ) ∪ L ( M 2 ) L(r_{1} + r_{2}) = L(M_{1}) \cup L(M_{2}) L(r1+r2)=L(M1)∪L(M2),因此,只需要证明 L ( M ) = L ( M 1 ) ∪ L ( M 2 ) L(M) = L(M_{1}) \cup L(M_{2}) L(M)=L(M1)∪L(M2)
- 先证 L ( M 1 ) ∪ L ( M 2 ) ⊆ L ( M ) L(M_{1}) \cup L(M_{2}) \subseteq L(M) L(M1)∪L(M2)⊆L(M)
- 设 x ∈ L ( M 1 ) ∪ L ( M 2 ) x \in L(M_{1}) \cup L(M_{2}) x∈L(M1)∪L(M2),从而有 x ∈ L ( M 1 ) x \in L(M_{1}) x∈L(M1),或者 x ∈ L ( M 2 ) x \in L(M_{2}) x∈L(M2)
- 当 x ∈ L ( M 1 ) x \in L(M_{1}) x∈L(M1)时,有 δ 1 ( q 01 , x ) = { f 1 } \delta_{1}(q_{01} , x) = \set{f_{1}} δ1(q01,x)={f1}
- 由 M M M的定义可得 δ ( q 0 , x ) = δ ( q 0 , ε x ε ) = δ ( δ ( q 0 , ε ) , x ε ) = δ ( { q 01 , q 02 } , x ε ) = δ ( q 01 , x ε ) ∪ δ ( q 02 , x ε ) = δ ( δ ( q 01 , x ) , ε ) ∪ δ ( δ ( q 02 , x ) , ε ) = δ ( δ 1 ( q 01 , x ) , ε ) ∪ δ ( δ 2 ( q 02 , x ) , ε ) = { f } ∪ δ ( δ 2 ( q 02 , x ) , ε ) \begin{aligned} \delta(q_{0} , x) &= \delta(q_{0} , \varepsilon x \varepsilon) \\ &= \delta(\delta(q_{0} , \varepsilon) , x \varepsilon) \\ &= \delta(\set{q_{01} , q_{02}} , x \varepsilon) \\ &= \delta(q_{01} , x \varepsilon) \cup \delta(q_{02} , x \varepsilon) \\ &= \delta(\delta(q_{01} , x) , \varepsilon) \cup \delta(\delta(q_{02} , x) , \varepsilon) \\ &= \delta(\delta_{1}(q_{01} , x) , \varepsilon) \cup \delta(\delta_{2}(q_{02} , x) , \varepsilon) \\ &= \set{f} \cup \delta(\delta_{2}(q_{02} , x) , \varepsilon) \end{aligned} δ(q0,x)=δ(q0,εxε)=δ(δ(q0,ε),xε)=δ({q01,q02},xε)=δ(q01,xε)∪δ(q02,xε)=δ(δ(q01,x),ε)∪δ(δ(q02,x),ε)=δ(δ1(q01,x),ε)∪δ(δ2(q02,x),ε)={f}∪δ(δ2(q02,x),ε)
- 即 x ∈ L ( M ) x \in L(M) x∈L(M)
- 同理可证,当 x ∈ L ( M 2 ) x \in L(M_{2}) x∈L(M2)时, x ∈ L ( M ) x \in L(M) x∈L(M)
- 再证 L ( M ) ⊆ L ( M 1 ) ∪ L ( M 2 ) L(M) \subseteq L(M_{1}) \cup L(M_{2}) L(M)⊆L(M1)∪L(M2)
- 设 x ∈ L ( M ) x \in L(M) x∈L(M), f ∈ δ ( q 0 , x ) f \in \delta(q_{0} , x) f∈δ(q0,x)
- 按照 M M M的定义, δ ( q 0 , x ) = δ ( q 0 , ε x ε ) = δ ( δ ( q 0 , ε ) , x ε ) = δ ( { q 01 , q 02 } , x ε ) = δ ( q 01 , x ε ) ∪ δ ( q 02 , x ε ) = δ ( δ ( q 01 , x ) , ε ) ∪ δ ( δ ( q 02 , x ) , ε ) = δ ( δ 1 ( q 01 , x ) , ε ) ∪ δ ( δ 2 ( q 02 , x ) , ε ) \begin{aligned} \delta(q_{0} , x) &= \delta(q_{0} , \varepsilon x \varepsilon) \\ &= \delta(\delta(q_{0} , \varepsilon) , x \varepsilon) \\ &= \delta(\set{q_{01} , q_{02}} , x \varepsilon) \\ &= \delta(q_{01} , x \varepsilon) \cup \delta(q_{02} , x \varepsilon) \\ &= \delta(\delta(q_{01} , x) , \varepsilon) \cup \delta(\delta(q_{02} , x) , \varepsilon) \\ &= \delta(\delta_{1}(q_{01} , x) , \varepsilon) \cup \delta(\delta_{2}(q_{02} , x) , \varepsilon) \end{aligned} δ(q0,x)=δ(q0,εxε)=δ(δ(q0,ε),xε)=δ({q01,q02},xε)=δ(q01,xε)∪δ(q02,xε)=δ(δ(q01,x),ε)∪δ(δ(q02,x),ε)=δ(δ1(q01,x),ε)∪δ(δ2(q02,x),ε)
- f ∈ δ ( q 0 , x ) f \in \delta(q_{0} , x) f∈δ(q0,x),并且此时 M M M的最后一次移动必是根据 δ ( f 1 , ε ) = { f } \delta(f_{1} , \varepsilon) = \set{f} δ(f1,ε)={f}或 δ ( f 2 , ε ) = { f } \delta(f_{2} , \varepsilon) = \set{f} δ(f2,ε)={f}之一进行的移动
- 如果是根据定义式 δ ( f 1 , ε ) = { f } \delta(f_{1} , \varepsilon) = \set{f} δ(f1,ε)={f}进行的最后一次移动,此时必有 δ 1 ( q 01 , x ) = { f 1 } \delta_{1}(q_{01} , x) = \set{f_{1}} δ1(q01,x)={f1}, x ∈ L ( M 1 ) x \in L(M_{1}) x∈L(M1)
- 如果是根据定义式 δ ( f 2 , ε ) = { f } \delta(f_{2} , \varepsilon) = \set{f} δ(f2,ε)={f}进行的最后一次移动,此时必有 δ 2 ( q 02 , x ) = { f 2 } \delta_{2}(q_{02} , x) = \set{f_{2}} δ2(q02,x)={f2}, x ∈ L ( M 2 ) x \in L(M_{2}) x∈L(M2)
- 无论是哪一种情况,都有 x ∈ L ( M 1 ) ∪ L ( M 2 ) x \in L(M_{1}) \cup L(M_{2}) x∈L(M1)∪L(M2)
r = r 1 r 2 r = r_{1} r_{2} r=r1r2
- 此时 r 1 r_{1} r1、 r 2 r_{2} r2中运算符的个数不会大于 k k k,由归纳假设,存在满足定理要求的 ε − N F A \varepsilon-NFA ε−NFA, M 1 = ( Q 1 , Σ , δ 1 , q 01 , { f 1 } ) M_{1} = (Q_{1} , \Sigma , \delta_{1} , q_{01} , \set{f_{1}}) M1=(Q1,Σ,δ1,q01,{f1}), M 2 = ( Q 2 , Σ , δ 2 , q 02 , { f 2 } ) M_{2} = (Q_{2} , \Sigma , \delta_{2} , q_{02} , \set{f_{2}}) M2=(Q2,Σ,δ2,q02,{f2}),使得 L ( M 1 ) = L ( r 1 ) L(M_{1}) = L(r_{1}) L(M1)=L(r1), L ( M 2 ) = L ( r 2 ) L(M_{2}) = L(r_{2}) L(M2)=L(r2),而且 Q 1 ∩ Q 2 = ∅ Q_{1} \cap Q_{2} = \emptyset Q1∩Q2=∅
- 取 M = ( Q 1 ∪ Q 2 , Σ , δ , q 01 , { f 2 } ) M = (Q_{1} \cup Q_{2} , \Sigma , \delta , q_{01} , \set{f_{2}}) M=(Q1∪Q2,Σ,δ,q01,{f2}),其中 δ \delta δ的定义为
- 对 ∀ q ∈ Q 1 − { f 1 } \forall q \in Q_{1} - \set{f_{1}} ∀q∈Q1−{f1}, a ∈ Σ ∪ { ε } a \in \Sigma \cup \set{\varepsilon} a∈Σ∪{ε}, δ ( q , a ) = δ 1 ( q , a ) \delta(q , a) = \delta_{1}(q , a) δ(q,a)=δ1(q,a)
- 对 ∀ q ∈ Q 2 \forall q \in Q_{2} ∀q∈Q2, a ∈ Σ ∪ { ε } a \in \Sigma \cup \set{\varepsilon} a∈Σ∪{ε}, δ ( q , a ) = δ 2 ( q , a ) \delta(q , a) = \delta_{2}(q , a) δ(q,a)=δ2(q,a)
- δ ( f 1 , ε ) = { q 02 } \delta(f_{1} , \varepsilon) = \set{q_{02}} δ(f1,ε)={q02}

- 往证 L ( r 1 r 2 ) = L ( M ) L(r_{1} r_{2}) = L(M) L(r1r2)=L(M)
- 由归纳假设, L ( r 1 ) = L ( M 1 ) L(r_{1}) = L(M_{1}) L(r1)=L(M1), L ( r 2 ) = L ( M 2 ) L(r_{2}) = L(M_{2}) L(r2)=L(M2),根据正则表达式的定义 L ( r 1 r 2 ) = L ( r 1 ) L ( r 2 ) L(r_{1} r_{2}) = L(r_{1}) L(r_{2}) L(r1r2)=L(r1)L(r2), L ( r 1 r 2 ) = L ( M 1 ) L ( M 2 ) L(r_{1} r_{2}) = L(M_{1}) L(M_{2}) L(r1r2)=L(M1)L(M2),因此,只需要证明 L ( M ) = L ( M 1 ) L ( M 2 ) L(M) = L(M_{1}) L(M_{2}) L(M)=L(M1)L(M2)
- 先证 L ( M 1 ) L ( M 2 ) ⊆ L ( M ) L(M_{1}) L(M_{2}) \subseteq L(M) L(M1)L(M2)⊆L(M)
- 设 x ∈ L ( M 1 ) L ( M 2 ) x \in L(M_{1}) L(M_{2}) x∈L(M1)L(M2),从而有 x 1 ∈ L ( M 1 ) x_{1} \in L(M_{1}) x1∈L(M1)并且 x 2 ∈ L ( M 2 ) x_{2} \in L(M_{2}) x2∈L(M2),使得 x = x 1 x 2 x = x_{1} x_{2} x=x1x2
- δ ( q 01 , x 1 ) = δ 1 ( q 01 , x 1 ) = { f 1 } \delta(q_{01} , x_{1}) = \delta_{1}(q_{01} , x_{1}) = \set{f_{1}} δ(q01,x1)=δ1(q01,x1)={f1}, δ ( q 02 , x 2 ) = δ 2 ( q 02 , x 2 ) = { f 2 } \delta(q_{02} , x_{2}) = \delta_{2}(q_{02} , x_{2}) = \set{f_{2}} δ(q02,x2)=δ2(q02,x2)={f2}
- δ ( q 01 , x ) = δ ( q 01 , x 1 x 2 ) = δ ( δ ( q 01 , x 1 ) , x 2 ) = δ ( δ 1 ( q 01 , x 1 ) , x 2 ) = δ ( f 1 , x 2 ) = δ ( f 1 , ε x 2 ) = δ ( δ ( f 1 , ε ) , x 2 ) = δ ( q 02 , x 2 ) = δ 2 ( q 02 , x 2 ) = { f 2 } \begin{aligned} \delta(q_{01} , x) &= \delta(q_{01} , x_{1} x_{2}) \\ &= \delta(\delta(q_{01} , x_{1}) , x_{2}) \\ &= \delta(\delta_{1}(q_{01} , x_{1}) , x_{2}) \\ &= \delta(f_{1} , x_{2}) \\ &= \delta(f_{1} , \varepsilon x_{2}) \\ &= \delta(\delta(f_{1} , \varepsilon) , x_{2}) \\ &= \delta(q_{02} , x_{2}) \\ &= \delta_{2}(q_{02} , x_{2}) \\ &= \set{f_{2}} \end{aligned} δ(q01,x)=δ(q01,x1x2)=δ(δ(q01,x1),x2)=δ(δ1(q01,x1),x2)=δ(f1,x2)=δ(f1,εx2)=δ(δ(f1,ε),x2)=δ(q02,x2)=δ2(q02,x2)={f2}
- 即 x ∈ L ( M ) x \in L(M) x∈L(M)
- 再证 L ( M ) ⊆ L ( M 1 ) L ( M 2 ) L(M) \subseteq L(M_{1}) L(M_{2}) L(M)⊆L(M1)L(M2)
- 设 x ∈ L ( M ) x \in L(M) x∈L(M), δ ( q 01 , x ) = { f 2 } \delta(q_{01} , x) = \set{f_{2}} δ(q01,x)={f2}
- 必存在 x x x的前缀 x 1 x_{1} x1和后缀 x 2 x_{2} x2,使得 x = x 1 x 2 x = x_{1} x_{2} x=x1x2,并且 x 1 x_{1} x1将 M M M从状态 q 01 q_{01} q01引导到状态 f 1 f_{1} f1, x 2 x_{2} x2将 M M M从状态 q 02 q_{02} q02引导到状态 f 2 f_{2} f2,即 δ ( q 01 , x ) = δ ( q 01 , x 1 x 2 ) = δ ( f 1 , x 2 ) = δ ( f 1 , ε x 2 ) = δ ( q 02 , x 2 ) = { f 2 } \begin{aligned} \delta(q_{01} , x) &= \delta(q_{01} , x_{1} x_{2}) \\ &= \delta(f_{1} , x_{2}) \\ &= \delta(f_{1} , \varepsilon x_{2}) \\ &= \delta(q_{02} , x_{2}) \\ &= \set{f_{2}} \end{aligned} δ(q01,x)=δ(q01,x1x2)=δ(f1,x2)=δ(f1,εx2)=δ(q02,x2)={f2}
- 其中, δ ( q 01 , x 1 ) = { f 1 } \delta(q_{01} , x_{1}) = \set{f_{1}} δ(q01,x1)={f1},说明 δ 1 ( q 01 , x 1 ) = { f 1 } \delta_{1}(q_{01} , x_{1}) = \set{f_{1}} δ1(q01,x1)={f1}, δ ( q 02 , x 2 ) = { f 2 } \delta(q_{02} , x_{2}) = \set{f_{2}} δ(q02,x2)={f2},说明 δ 2 ( q 02 , x 2 ) = { f 2 } \delta_{2}(q_{02} , x_{2}) = \set{f_{2}} δ2(q02,x2)={f2},这表明 x 1 ∈ L ( M 1 ) x_{1} \in L(M_{1}) x1∈L(M1), x 2 ∈ L ( M 2 ) x_{2} \in L(M_{2}) x2∈L(M2)
- 从而 x = x 1 x 2 ∈ L ( M 1 ) L ( M 2 ) x = x_{1} x_{2} \in L(M_{1}) L(M_{2}) x=x1x2∈L(M1)L(M2)
r = r 1 ∗ r = r_{1}^{*} r=r1∗
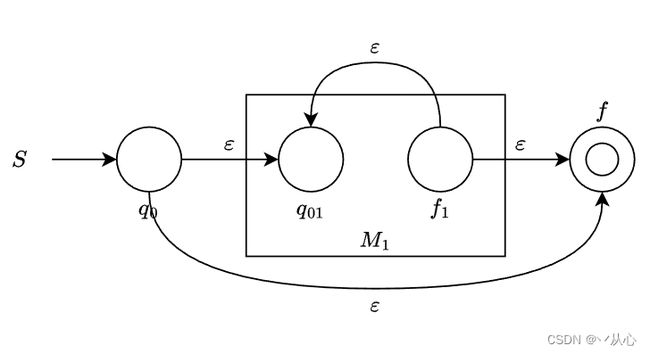
- 此时 r 1 r_{1} r1中运算符的个数不会大于 k k k,由归纳假设,存在满足定理要求的 ε − N F A \varepsilon-NFA ε−NFA, M 1 = ( Q 1 , Σ , δ 1 , q 01 , { f 1 } ) M_{1} = (Q_{1} , \Sigma , \delta_{1} , q_{01} , \set{f_{1}}) M1=(Q1,Σ,δ1,q01,{f1}),使得 L ( M 1 ) = L ( r 1 ) L(M_{1}) = L(r_{1}) L(M1)=L(r1)
- 取 M = ( Q 1 ∪ { q 0 , f } , Σ , δ , q 0 , { f } ) M = (Q_{1} \cup \set{q_{0} , f} , \Sigma , \delta , q_{0} , \set{f}) M=(Q1∪{q0,f},Σ,δ,q0,{f}),其中 q 0 q_{0} q0, f ∉ Q 1 f \notin Q_{1} f∈/Q1, δ \delta δ的定义为
- 对 ∀ q ∈ Q 1 − { f 1 } \forall q \in Q_{1} - \set{f_{1}} ∀q∈Q1−{f1}, a ∈ Σ a \in \Sigma a∈Σ, δ ( q , a ) = δ 1 ( q , a ) \delta(q , a) = \delta_{1}(q , a) δ(q,a)=δ1(q,a)
- δ ( f 1 , ε ) = { q 01 , f } \delta(f_{1} , \varepsilon) = \set{q_{01} , f} δ(f1,ε)={q01,f}
- δ ( q 0 , ε ) = { q 01 , f } \delta(q_{0} , \varepsilon) = \set{q_{01} , f} δ(q0,ε)={q01,f}
-
往证 L ( r 1 ∗ ) = L ( M ) L(r_{1}^{*}) = L(M) L(r1∗)=L(M)
-
由归纳假设, L ( M 1 ) = L ( r 1 ) L(M_{1}) = L(r_{1}) L(M1)=L(r1),根据正则表达式的定义 L ( r ) = ( L ( r 1 ) ) ∗ L(r) = (L(r_{1}))^{*} L(r)=(L(r1))∗,只需证明 L ( M ) = ( L ( M 1 ) ) ∗ L(M) = (L(M_{1}))^{*} L(M)=(L(M1))∗
-
先证 L ( M ) ⊆ ( L ( M 1 ) ) ∗ L(M) \subseteq (L(M_{1}))^{*} L(M)⊆(L(M1))∗
-
设 x ∈ L ( M ) x \in L(M) x∈L(M),如果 x = ε x = \varepsilon x=ε,由克林闭包的定义,显然 x ∈ ( L ( M 1 ) ) ∗ x \in (L(M_{1}))^{*} x∈(L(M1))∗
-
如果 x ≠ ε x \neq \varepsilon x=ε,由 M M M的定义,必定存在 x 1 x_{1} x1, x 2 x_{2} x2, ⋯ \cdots ⋯, x n x_{n} xn, x = x 1 x 2 ⋯ x n ( n ≥ 1 ) x = x_{1} x_{2} \cdots x_{n} (n \geq 1) x=x1x2⋯xn(n≥1)满足 δ ( q 0 , x ) = δ ( q 0 , x 1 x 2 ⋯ x n ) = δ ( δ ( q 0 , ε ) , x 1 x 2 ⋯ x n ) = δ ( q 01 , x 1 x 2 ⋯ x n ) = δ ( δ 1 ( q 01 , x 1 ) , x 2 ⋯ x n ) = δ ( f 1 , x 2 ⋯ x n ) ⋯ = δ ( f 1 , x n ) = δ ( δ ( f 1 , ε ) , x n ) = δ ( q 01 , x n ) = δ ( δ 1 ( q 01 , x n ) , ε ) = δ ( f 1 , ε ) = { f } \begin{aligned} \delta(q_{0} , x) &= \delta(q_{0} , x_{1} x_{2} \cdots x_{n}) \\ &= \delta(\delta(q_{0} , \varepsilon) , x_{1} x_{2} \cdots x_{n}) \\ &= \delta(q_{01} , x_{1} x_{2} \cdots x_{n}) \\ &= \delta(\delta_{1}(q_{01} , x_{1}) , x_{2} \cdots x_{n}) \\ &= \delta(f_{1} , x_{2} \cdots x_{n}) \\ &\cdots \\ &= \delta(f_{1} , x_{n}) \\ &= \delta(\delta(f_{1} , \varepsilon) , x_{n}) \\ &= \delta(q_{01} , x_{n}) \\ &= \delta(\delta_{1}(q_{01} , x_{n}) , \varepsilon) \\ &= \delta(f_{1} , \varepsilon) \\ &= \set{f} \end{aligned} δ(q0,x)=δ(q0,x1x2⋯xn)=δ(δ(q0,ε),x1x2⋯xn)=δ(q01,x1x2⋯xn)=δ(δ1(q01,x1),x2⋯xn)=δ(f1,x2⋯xn)⋯=δ(f1,xn)=δ(δ(f1,ε),xn)=δ(q01,xn)=δ(δ1(q01,xn),ε)=δ(f1,ε)={f}
-
这表明 x = x 1 x 2 ⋯ x n ∈ ( L ( M 1 ) ) ∗ x = x_{1} x_{2} \cdots x_{n} \in (L(M_{1}))^{*} x=x1x2⋯xn∈(L(M1))∗
-
-
再证 ( L ( M 1 ) ) ∗ ⊆ L ( M ) (L(M_{1}))^{*} \subseteq L(M) (L(M1))∗⊆L(M)
- 类似地,不难证明 ( L ( M 1 ) ) ∗ ⊆ L ( M ) (L(M_{1}))^{*} \subseteq L(M) (L(M1))∗⊆L(M)
-
例题
问题
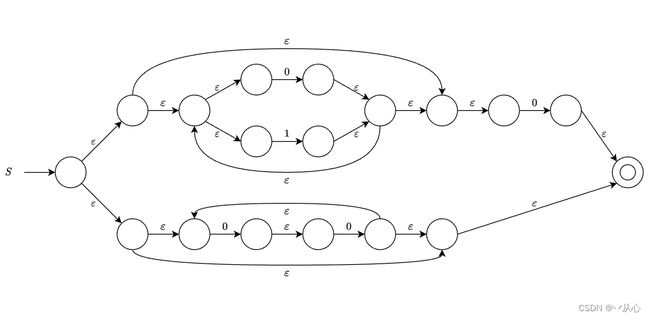
- 构造与正则表达式 ( 0 + 1 ) ∗ 0 + ( 00 ) ∗ (0 + 1)^{*} 0 + (00)^{*} (0+1)∗0+(00)∗等价的 F A FA FA
解答
正则语言可以用正则表达式表示
构造与 D F A DFA DFA等价的正则表达式
- 设 D F A M = ( { q 1 , q 2 , ⋯ , q n } , Σ , δ , q 1 , F ) DFA \ M = (\set{q_{1} , q_{2} , \cdots , q_{n}} , \Sigma , \delta , q_{1} , F) DFA M=({q1,q2,⋯,qn},Σ,δ,q1,F)
- 令 R i j k = { x ∣ δ ( q i , x ) = q j , 而且对于 x 的任意前缀 y ( y ≠ x , y ≠ ε ) , 如果 δ ( q i , y ) = q l , 则 l ≤ k } R_{ij}^{k} = \set{x \mid \delta(q_{i} , x) = q_{j} , 而且对于 x 的任意前缀 y (y \neq x , y \neq \varepsilon) , 如果 \delta(q_{i} , y) = q_{l} , 则 l \leq k} Rijk={x∣δ(qi,x)=qj,而且对于x的任意前缀y(y=x,y=ε),如果δ(qi,y)=ql,则l≤k}
- 为了便于计算,将 R i j k R_{ij}^{k} Rijk递归地定义为
R i j 0 = { { a ∣ δ ( q i , a ) = q j } , i ≠ j { a ∣ δ ( q i , a ) = q j } ∪ { ε } , i = j R_{ij}^{0} = \begin{cases} \set{a \mid \delta(q_{i} , a) = q_{j}} , & i \neq j \\ \set{a \mid \delta(q_{i} , a) = q_{j}} \cup \set{\varepsilon} , & i = j \end{cases} Rij0={{a∣δ(qi,a)=qj},{a∣δ(qi,a)=qj}∪{ε},i=ji=j
R i j k = R i k k − 1 ( R k k k − 1 ) ∗ R k j k − 1 ∪ R i j k − 1 R_{ij}^{k} = R_{ik}^{k - 1} (R_{kk}^{k - 1})^{*} R_{kj}^{k - 1} \cup R_{ij}^{k - 1} Rijk=Rikk−1(Rkkk−1)∗Rkjk−1∪Rijk−1
- 显然, L ( M ) = ⋃ q f ∈ F R 1 f n L(M) = \displaystyle\bigcup\limits_{q_{f} \in F}{R_{1f}^{n}} L(M)=qf∈F⋃R1fn
图上作业方法
- 对 D F A M = ( Q , Σ , δ , q 0 , F ) DFA \ M = (Q , \Sigma , \delta , q_{0} , F) DFA M=(Q,Σ,δ,q0,F)的状态转移图,操作步骤如下
预处理
- 在状态转移图中增加状态 X X X和 Y Y Y,从状态 X X X到 M M M的开始状态 q 0 q_{0} q0引一条标记为 ε \varepsilon ε的弧,对 ∀ q ∈ F \forall q \in F ∀q∈F,从状态 q q q到状态 Y Y Y分别引一条标记为 ε \varepsilon ε的弧
- 去掉所有的不可达状态
循环操作
- 重复如下操作,直到该图中不再包含除了 X X X和 Y Y Y的其他状态,并且这两个状态之间最多只有一条弧
- 并弧:对图中任意两个状态 q q q, p p p,如果图中包含有从 q q q到 p p p的标记为 r 1 r_{1} r1, r 2 r_{2} r2, ⋯ \cdots ⋯, r g r_{g} rg的并行弧,则用从 q q q到 p p p的、标记为 r 1 + r 2 + ⋯ + r g r_{1} + r_{2} + \cdots + r_{g} r1+r2+⋯+rg的弧取代这 g g g个并行弧,其中, q q q和 p p p可以是同一个状态
- 去状态 1 1 1:对图中任意 3 3 3个状态 q q q, p p p, t t t,如果从 q q q到 p p p有一条标记为 r 1 r_{1} r1的弧,从 p p p到 t t t有一条标记为 r 2 r_{2} r2的弧,并且不存在从状态 p p p到状态 p p p的弧,则将状态 p p p和与之关联的这两条弧去掉,增加一条从 q q q到 t t t的标记为 r 1 r 2 r_{1} r_{2} r1r2的弧
- 去状态 2 2 2:对图中任意 3 3 3个状态 q q q, p p p, t t t,如果从 q q q到 p p p有一条标记为 r 1 r_{1} r1的弧,从 p p p到 t t t有一条标记为 r 2 r_{2} r2的弧,并且存在一条从状态 p p p到状态 p p p标记为 r 3 r_{3} r3的弧,则将状态 p p p和与之关联的这 3 3 3条弧去掉,增加一条从 q q q到 t t t的标记为 r 1 r 3 ∗ r 2 r_{1} r_{3}^{*} r_{2} r1r3∗r2的弧
- 去状态 3 3 3:如果图中只有 3 3 3个状态,而且不存在从状态 X X X到 Y Y Y的路,则将除状态 X X X和 Y Y Y之外的第三个状态及其相关的弧全部删除
- 从状态 X X X到 Y Y Y的弧的标记为所求的正则表达式,如果该弧不存在,则所求的正则表达式为 ∅ \emptyset ∅