人工智能-异步计算
异步计算
今天的计算机是高度并行的系统,由多个CPU核、多个GPU、多个处理单元组成。通常每个CPU核有多个线程,每个设备通常有多个GPU,每个GPU有多个处理单元。总之,我们可以同时处理许多不同的事情,并且通常是在不同的设备上。不幸的是,Python并不善于编写并行和异步代码,至少在没有额外帮助的情况下不是好选择。归根结底,Python是单线程的,将来也是不太可能改变的。因此在诸多的深度学习框架中,MXNet和TensorFlow之类则采用了一种异步编程(asynchronous programming)模型来提高性能,而PyTorch则使用了Python自己的调度器来实现不同的性能权衡。对PyTorch来说GPU操作在默认情况下是异步的。当调用一个使用GPU的函数时,操作会排队到特定的设备上,但不一定要等到以后才执行。这允许我们并行执行更多的计算,包括在CPU或其他GPU上的操作。
因此,了解异步编程是如何工作的,通过主动地减少计算需求和相互依赖,有助于我们开发更高效的程序。这能够减少内存开销并提高处理器利用率。
import os
import subprocess
import numpy
from mxnet import autograd, gluon, np, npx
from mxnet.gluon import nn
from d2l import mxnet as d2l
npx.set_np()通过后端异步处理
作为热身,考虑一个简单问题:生成一个随机矩阵并将其相乘。让我们在NumPy和mxnet.np中都这样做,看看有什么不同。
# GPU计算热身
device = d2l.try_gpu()
a = torch.randn(size=(1000, 1000), device=device)
b = torch.mm(a, a)
with d2l.Benchmark('numpy'):
for _ in range(10):
a = numpy.random.normal(size=(1000, 1000))
b = numpy.dot(a, a)
with d2l.Benchmark('torch'):
for _ in range(10):
a = torch.randn(size=(1000, 1000), device=device)
b = torch.mm(a, a)numpy: 1.0704
sec torch: 0.0013 sec
通过PyTorch的基准输出比较快了几个数量级。NumPy点积是在CPU上执行的,而PyTorch矩阵乘法是在GPU上执行的,后者的速度要快得多。但巨大的时间差距表明一定还有其他原因。默认情况下,GPU操作在PyTorch中是异步的。强制PyTorch在返回之前完成所有计算,这种强制说明了之前发生的情况:计算是由后端执行,而前端将控制权返回给了Python。
with d2l.Benchmark():
for _ in range(10):
a = torch.randn(size=(1000, 1000), device=device)
b = torch.mm(a, a)
torch.cuda.synchronize(device)Done: 0.0049 sec
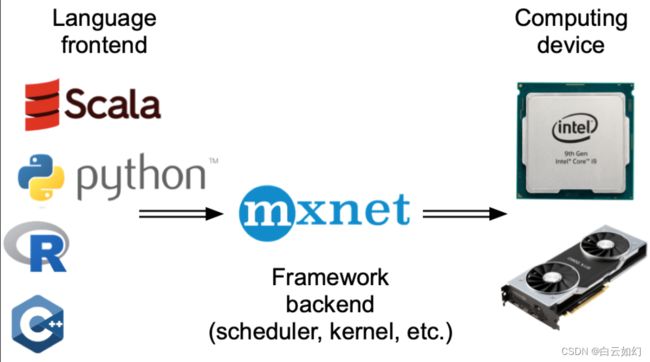
广义上说,PyTorch有一个用于与用户直接交互的前端(例如通过Python),还有一个由系统用来执行计算的后端。如图所示,用户可以用各种前端语言编写PyTorch程序,如Python和C++。不管使用的前端编程语言是什么,PyTorch程序的执行主要发生在C++实现的后端。由前端语言发出的操作被传递到后端执行。后端管理自己的线程,这些线程不断收集和执行排队的任务。请注意,要使其工作,后端必须能够跟踪计算图中各个步骤之间的依赖关系。因此,不可能并行化相互依赖的操作。
接下来看看另一个简单例子,以便更好地理解依赖关系图。
x = torch.ones((1, 2), device=device)
y = torch.ones((1, 2), device=device)
z = x * y + 2
ztensor([[3., 3.]],device='cuda:0')
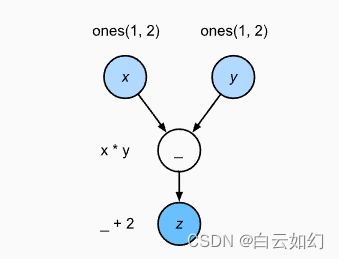
上面的代码片段在图中进行了说明。每当Python前端线程执行前三条语句中的一条语句时,它只是将任务返回到后端队列。当最后一个语句的结果需要被打印出来时,Python前端线程将等待C++后端线程完成变量z的结果计算。这种设计的一个好处是Python前端线程不需要执行实际的计算。因此,不管Python的性能如何,对程序的整体性能几乎没有影响。 下图演示了前端和后端如何交互。
