【极坐标下牛顿—拉夫逊潮流计算(matlab版+python版)】
程序名称##
极坐标下牛顿—拉夫逊潮流计算(matlab版+python版)
程序功能(对象)
- 适用于任意大小的纯交流电网,支持节点和支路的增删;
- 适用于接入多个风电、光伏等分布式电源;
- 子函数包含:节点导纳矩阵计算,雅克比矩阵计算(n-1+m维);
- 误差分析:输出形式对标matpower内runpf()函数,误差<10^-3;
程序函数说明
- 主程序:Test_NL_PowerFlow
- 输入算例子程序:所有case文件
- 节点导纳子程序:createYbus文件
- 雅克比矩阵子程序:Jacobi文件
程序计算步骤及流程图
- 参数初始化,读取网络参数,在此标幺化
ac_data = case33bw_60;%IEEE33节点为例
ac_bus = ac_data.bus;
ac_branch = ac_data.branch;
ac_gen = ac_data.gen;
ac_dg = ac_data.dg;
- 形成节点导纳矩阵n*n维
Ybus = createYbus(ac_baseMVA, ac_bus, ac_branch);
- %循环列写n-1+m个功率不平衡方程,节点注入功率计算
for j=1:busNum
detal_ij=(Bus_V(i,3)-Bus_V(j,3))*pi/180;
Pii(i, 2)=Pii(i, 2)+Bus_V(j, 2)*(real(Ybus(i, j))*cos(detal_ij)+imag(Ybus(i, j))*sin(detal_ij));
Qii(i, 2)=Qii(i, 2)+Bus_V(j, 2)*(real(Ybus(i, j))*sin(detal_ij)-imag(Ybus(i, j))*cos(detal_ij));
end
Pii(i, 2) = Bus_V(i, 2)*Pii(i, 2);
Qii(i, 2) = Bus_V(i, 2)*Qii(i, 2);
Pi = Pii([ac_pq;ac_pv], :); %除去平衡节点且重置节点位置
Qi = Qii([ac_pq;ac_pv], :);
- 计算功率偏差,判断是否收敛
dP = Pacs - Pi(:,2);
dQ = Qacs - Qi(:,2);
- 形成雅克比矩阵
[J,H,N,K,L] = Jacobi(V, Y, ac_pq ,ac_pv,Pi,Qi);
- 输出节点电压和支路功率
(Bus_V第二列为电压幅值,第三列为电压相角; S_branch第三列为Pij,S_branch第四列为Pji,S_branch第五列为支路ij损耗)
Ui = Bus_V(:, 2) .* exp(1j * (Bus_V(:, 3)*pi/180));
S_branch(i , 3) = Ui(from)*conj(Ui(from))*conj(yi0(from, to))+Ui(from)*(conj(Ui(from))-conj(Ui(to)))*conj(-Ybus(from, to));
S_branch(i , 4) =Ui(to)*conj(Ui(to))*conj(yi0(to, from))+Ui(to)*(conj(Ui(to))-conj(Ui(from)))*conj(-Ybus(to, from));
S_branch(i , 5) = real(S_branch(i , 3)+ S_branch(i , 4));
- 计算流程图如下图所示
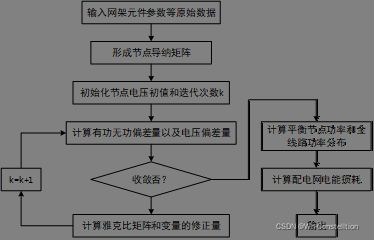
基于牛顿拉夫逊法电能损耗计算流程图
程序误差分析
- 接入DG之前,matlab版计算结果与matpower计算结果对比(结果一致),误差主要存在于收敛精度判断



- matlab版18节点接入DG后的计算结果:(Bus_V为标幺值)

- python版接入DG之后计算结果:(与MATLAB版结果一致)

程序连接
CSND借鉴版: https://download.csdn.net/download/WConstelltion/12311925
matlab版:https://download.csdn.net/download/WConstelltion/85045068
通用性程序请私信“深入”探讨