图的搜索(二):贝尔曼-福特算法、狄克斯特拉算法和A*算法
图的搜索(二):贝尔曼-福特算法、狄克斯特拉算法和A*算法
贝尔曼-福特算法
贝尔曼-福特(Bellman-Ford)算法是一种在图中求解最短路径问题的算法。最短路径问题就是在加权图指定了起点和终点的前提下,寻找从起点到终点的路径中权重总和最小的那条路径。

设置A为起点,G为终点。

首先设置各个顶点的初始权重 :起点为 0,其他顶点为无穷大(∞)。这个权重表示的是从 A 到该顶点的最短路径的暂定距离。随着计算往下进行,这个值会变得越来越小,最终收敛到正确的数值。

选中候补顶点,分别计算这条边从一端到另一端的权重,计算方法为:“顶点原本的权重+边的权重”

计算权重,如果计算结果小于顶点的值,就更新这个值。
如图,计算A到B的权重:顶点 B 的权重是无穷大,比 9 大,所以把它更新为 9。更新时需要记录计算的是从哪个顶点到该顶点的路径。
再次计算B到A的权重:B 的权重为 9,从 B 到 A 的权重便为 9+9=18。与顶点 A 现在的值 0 进行比较,因为现在的值更小,所以不更新。
A到C的路径计算同理。接下来计算B到C的路径。
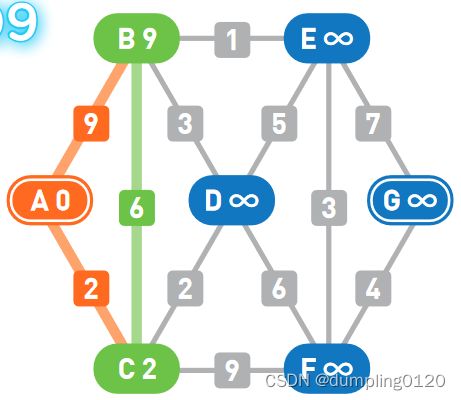
在进行B-C计算时,发现A-C-B的路径比A-B的路径更短,于是更新如下:
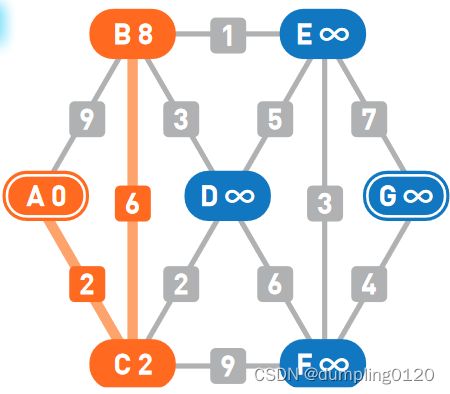
接着对所有的边进行更新操作
更新完所有的边后,第 1 轮更新就结束了。接着,重复对所有边的更新操作,直到权重不能被更新为止。
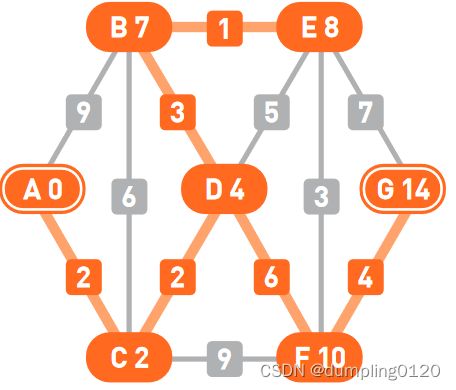
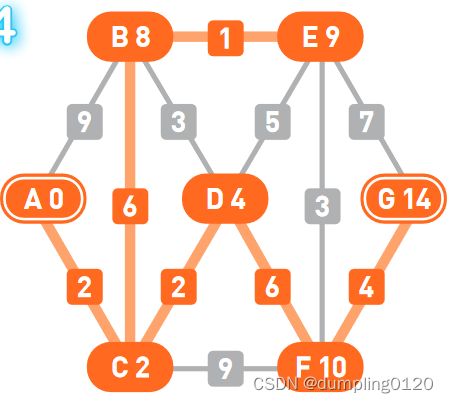
第二轮更新后,顶点 B 的权重从 8 变成了 7,顶点 E 的权重从 9 变成了 8。接着进行第三轮更新。发现第三轮更新后,所有顶点的权重不再更新,操作结束。算法的搜索流程也就此结束,我们找到了从起点到其余各个顶点的最短路径。
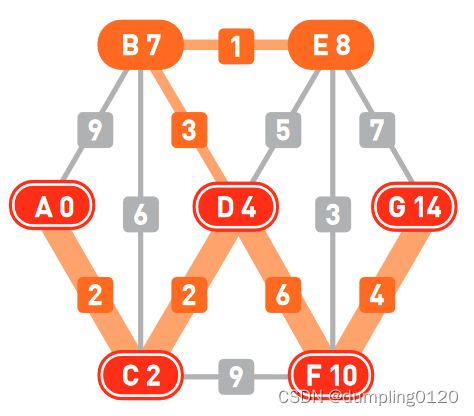
根据搜索结果可知,从起点 A 到终点 G 的最短路径是 A-C-D-F-G,权重为 14。
将图的顶点数设为 n、边数设为 m。该算法经过 n 轮更新操作后就会停止,而在每轮更新操作中都需要对各个边进行 1 次确认,因此 1 轮更新所花费的时间就是 O(m),整体的时间复杂度就是 O(nm)。
有向图与以上步骤相同,只需按照边所指向的方向来计算即可。
计算最短路径时,边的权重代表的通常都是时间、距离或者路费等,因此基本都是非负数。不过,即便权重为负,贝尔曼 - 福特算法也可以正常运行。
如果闭环中有负数权重,就不存在最短路径。
狄克斯特拉算法
狄克斯特拉( Dijkstra)算法也是求解最短路径问题的算法,使用它可以求得从起点到终点的路径中权重总和最小的那条路径。
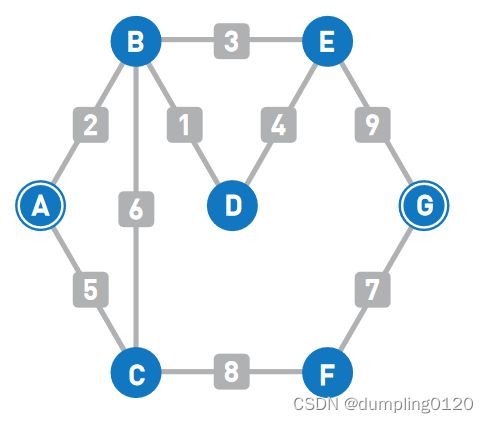
仍然设A为起点,G为终点。
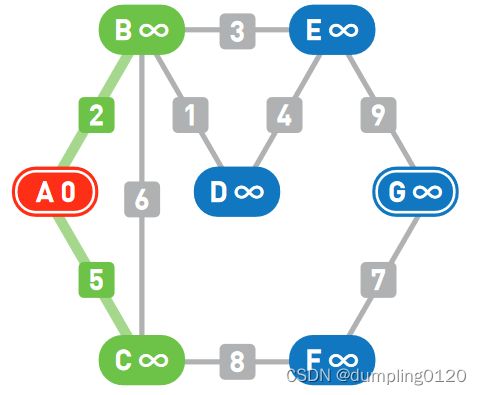
与贝尔曼-福特算法相同,将起点设置为0,其他顶点设置为无穷大。设置从A出发,寻找可以从目前所在的顶点直达且尚未被搜索过的顶点,此处为顶点 B 和顶点 C,将它们设为下一步的候补顶点。

计算后结果如上图。计算方法是“目前所在顶点的权重+目前所在顶点到候补顶点的权重”。与贝尔曼-福特算法类似。

**从候补顶点中选出权重最小的顶点。**此处 B 的权重最小,那么路径 A-B 就是从起点 A 到顶点 B 的最短路径。确定了最短路径,移动到顶点B。

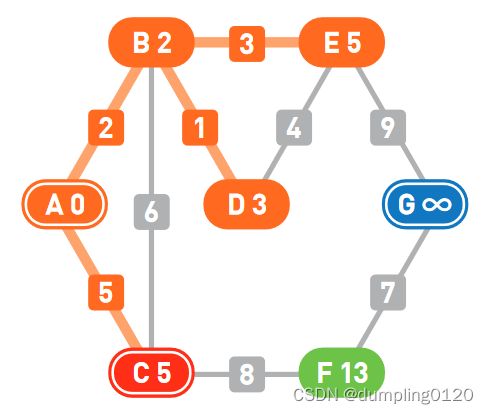
将可以从顶点B直达的顶点设为新的候补顶点,于是顶点 D 和顶点 E 也成为了候补。目前有三个候补顶点 C、D、E。

同理。在计算B到各顶点值后,比较各点值大小。其中B-C点的权重为8>5,所以不更新。确认了最短路径,移动到顶点D。计算D-E的权重为7>5,发现并不需要更新它。现在,有两个候补顶点(C和E)权重均为5,选择哪一个向下计算都可以。以下先选择C。
算出F点的权重后,回到E进行计算。
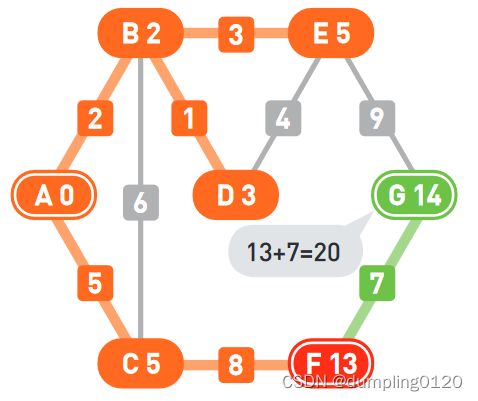
此时算出G点的权重为14。再次回到F,对F-G的权重进行计算得20>14。故G的最小权重为14。
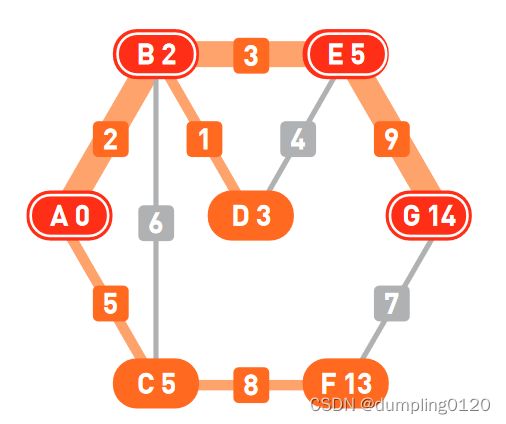
最终得到的这颗橙色的树就 是最短路径树,它表示了起点到达各个顶点的最短路径。
比起需要对所有的边都重复计算权重和更新权重的贝尔曼 - 福特算法,狄克斯特拉算法多了一步选择顶点的操作,这使得它在求最短路径上更为高效。
将图的顶点数设为 n、边数设为 m,那么如果事先不进行任何处理,该算法的时 间复杂度就是 O( n²)。不过,如果对数据结构进行优化,那么时间复杂度就会变为 O(m + nlogn)。
有负数权重时不能使用狄克斯特拉算法
不存在负数权重时,更适合使用效率较高的狄克斯特拉算法,而存 在负数权重时,即便较为耗时,也应该使用可以得到正确答案的贝尔曼 - 福特算法。
A*算法
A*(A-Star)算法也是一种在图中求解最短路径问题的算法,由狄克斯特拉算法发展而来。
狄克斯特拉算法会从离起点近的顶点开始,按顺序求出起点到各个顶点的最短路径。也就是说,一些离终点较远的顶点的最短路径也会被计算出来,但这部分其实是无用的。与之不同,A* 就会预先估算一个值,并利用这个值来省去一些无用的计算。
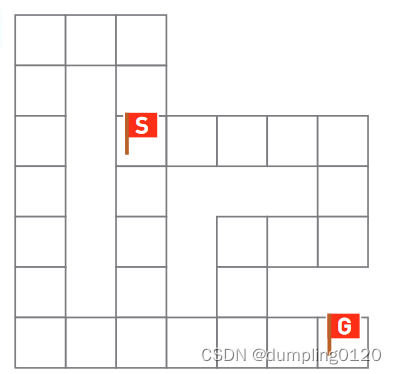
先使用狄克斯特拉算法来求解以上迷宫的最短路径。
将迷宫看作是一个图,其中每个方块都是一个顶点,各顶点间的距离(权重)都为 1。
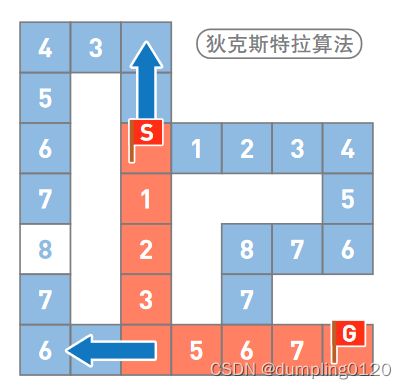
用狄克斯特拉算法求最短路径的结果会如上图所示,方块中的数字表示从起点到该顶点的距离(权重),蓝色和橙色的方块表示搜索过的区域,橙色方块同时还表示从 S 到 G 的最短路径。
狄克斯特拉算法只根据起点到候补顶点的距离来决定下一个顶点。因此,它无法发现蓝色箭头所指的这两条路径其实离终点越来越远,同 样会继续搜索。
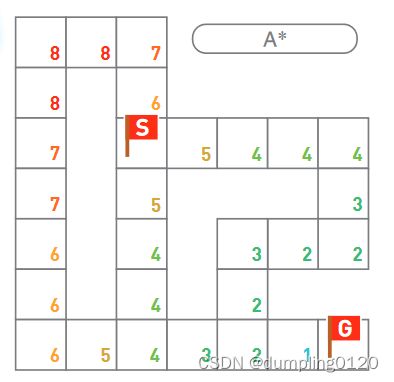
而A* 算法不仅会考虑从起点到候补顶点的距离, 还会考虑从当前所在顶点到终点的估算距离。 这个估算距离可以自由设定,此处我们用的是将顶点到终点的直线距离四舍五入后的值。
由人工预先设定的估算距离被称为**“距离估算值”。如果事先根据已知信息设定合适的距离估算值,再将它作为启发信息辅助计算,搜索就会变得更加高效。这样的算法也成为启发式算法**。
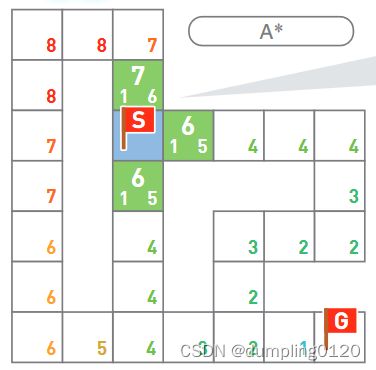
从起点开始搜索。分别计算起点周围每个顶点的权重。计算方法是“从起点到该顶点的距离”(方块左下)加上 “距离估算值”(方块右下)。

选择一个权重最小的顶点,用橙色表示,并继续向后搜索。

按照顺序继续向下搜索。
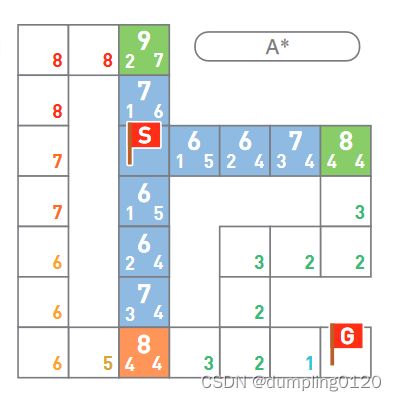

搜索完毕如上图。可以看出基本不回去计算离终点太远的区域。
如果我们能得到一些启发信息,即各个顶点到终点的大致距离(这个距离不需是准确的值)我们就能使用 A* 算法。当然,有时这类信息是完全无法估算的,这时就不能使用 A* 算法。
距离估算值越接近当前顶点到终点的实际值,A* 算法的搜索效率也就越高;反过来,如果距离估算值与实际值相差较大,那么该算法的效率可能会比狄克斯特拉算法的还要低。如果差距再大一些,甚至可能无法得到正确答案。
不过,当距离估算值小于实际距离时,是一定可以得到正确答案的(只是如果没有设定合适的距离估算值,效率会变差)。
A* 算法在游戏编程中经常被用于计算敌人追赶玩家时的行动路线等,但由于该算法的计算量较大,所以可能会使游戏整体的运行速度变慢。因此在实际编程时,需要考虑结合其他算法,或者根据具体的应用场景做出相应调整。
参考资料:我的第一本算法书 (石田保辉 宮崎修一)