YOLOv8最新改进系列:YOLOv8融合SwinTransformer模块,有效提升小目标检测效果!
YOLOv8最新改进系列
Transformer提出的论文戳这
详细的改进教程以及源码,戳这!戳这!!戳这!!!B站:AI学术叫叫兽 源码在相簿的链接中,动态中也有链接,感谢支持!祝科研遥遥领先!
截止到发稿,B站YOLOv8最新改进系列的源码包已更新了20种!
YOLOv8最新改进系列:YOLOv8融合SwinTransformer模块,有效提升小目标检测效果!
- YOLOv8最新改进系列
- 一、swin transformer概述
- 二、YOLOv8融合SwinTransformer模块
-
- 2.1 修改YAML文件
- 2.2 新建SwinTransformer.py
- 2.3 修改tasks.py
-
- 2.3.1 导包
- 2.3.2 注册
- 三、验证是否成功即可
一、swin transformer概述
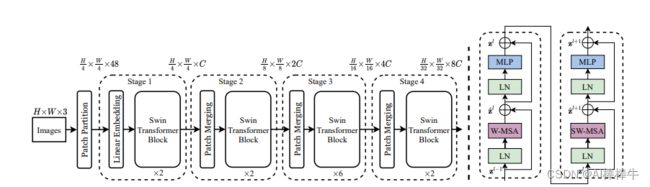
上图是Swin Transformer的整体结构,非常像卷积的层级结构,分辨率每层变成一半,而通道数变成两倍。首先Patch Partition,就是VIT中等分成小块的操作;然后分成4个stage,每个stage中包括两个部分,分别是patch Merging(第一个块是线性层) 和Swin Transformer Block。patch Merging是一个类似于池化的操作,池化会损失信息,patch Merging不会。右图是Swin Transformer Block结构,和transformer block基本类似,不同的地方在多头自注意力MSA换成了窗口多头自注意力W-MSA和移动窗口多头自注意力SW-MSA,右图紫框。详细的内容可以去作者提出的文章了解。本文主要进行YOLOv8的优化。
二、YOLOv8融合SwinTransformer模块
2.1 修改YAML文件
# Ultralytics YOLO , AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, SwinTransformer, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 21 (P5/32-large)
- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
在这里我只添加了一个模块,实际上可以根据需要多添加几个。
2.2 新建SwinTransformer.py
核心代码示例如下:
class WindowAttention(nn.Module):
def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
super().__init__()
self.dim = dim
self.window_size = window_size # Wh, Ww
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
# define a parameter table of relative position bias
self.relative_position_bias_table = nn.Parameter(
torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
# get pair-wise relative position index for each token inside the window
coords_h = torch.arange(self.window_size[0])
coords_w = torch.arange(self.window_size[1])
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
relative_co ords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
relative_coords[:, :, 1] += self.window_size[1] - 1
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
self.register_buffer("relative_position_index", relative_position_index)
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
nn.init.normal_(self.relative_position_bias_table, std=.02)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x, mask=None):
B_, N, C = x.shape
qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
q = q * self.scale
attn = (q @ k.transpose(-2, -1))
relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
attn = attn + relative_position_bias.unsqueeze(0)
if mask is not None:
nW = mask.shape[0]
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
attn = attn.view(-1, self.num_heads, N, N)
attn = self.softmax(attn)
else:
attn = self.softmax(attn)
attn = self.attn_drop(attn)
# print(attn.dtype, v.dtype)
try:
x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
except:
# print(attn.dtype, v.dtype)
x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class SwinTransformer(nn.Module):
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super(SwinTransformer, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1, 1)
num_heads = c_ // 32
self.m = SwinTransformerBlock(c_, c_, num_heads, n)
# self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
def forward(self, x):
y1 = self.m(self.cv1(x))
y2 = self.cv2(x)
return self.cv3(torch.cat((y1, y2), dim=1))
class SwinTransformerB(nn.Module):
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super(Swin_Transformer_B, self).__init__()
c_ = int(c2) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1, 1)
num_heads = c_ // 32
self.m = SwinTransformerBlock(c_, c_, num_heads, n)
# self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
def forward(self, x):
x1 = self.cv1(x)
y1 = self.m(x1)
y2 = self.cv2(x1)
return self.cv3(torch.cat((y1, y2), dim=1))
class SwinTransformerC(nn.Module):
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super(Swin_Transformer_C, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(c_, c_, 1, 1)
self.cv4 = Conv(2 * c_, c2, 1, 1)
num_heads = c_ // 32
self.m = SwinTransformerBlock(c_, c_, num_heads, n)
# self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
def forward(self, x):
y1 = self.cv3(self.m(self.cv1(x)))
y2 = self.cv2(x)
return self.cv4(torch.cat((y1, y2), dim=1))
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
def window_partition(x, window_size):
B, H, W, C = x.shape
assert H % window_size == 0, 'feature map h and w can not divide by window size'
x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
return windows
def window_reverse(windows, window_size, H, W):
B = int(windows.shape[0] / (H * W / window_size / window_size))
x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
return x
class SwinTransformerLayer(nn.Module):
def __init__(self, dim, num_heads, window_size=8, shift_size=0,
mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
act_layer=nn.SiLU, norm_layer=nn.LayerNorm):
super().__init__()
self.dim = dim
self.num_heads = num_heads
self.window_size = window_size
self.shift_size = shift_size
self.mlp_ratio = mlp_ratio
# if min(self.input_resolution) <= self.window_size:
# # if window size is larger than input resolution, we don't partition windows
# self.shift_size = 0
# self.window_size = min(self.input_resolution)
assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
self.norm1 = norm_layer(dim)
self.attn = WindowAttention(
dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
def create_mask(self, H, W):
# calculate attention mask for SW-MSA
img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
h_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
w_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
return attn_mask
def forward(self, x):
# reshape x[b c h w] to x[b l c]
_, _, H_, W_ = x.shape
Padding = False
if min(H_, W_) < self.window_size or H_ % self.window_size != 0 or W_ % self.window_size != 0:
Padding = True
# print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
pad_r = (self.window_size - W_ % self.window_size) % self.window_size
pad_b = (self.window_size - H_ % self.window_size) % self.window_size
x = F.pad(x, (0, pad_r, 0, pad_b))
# print('2', x.shape)
B, C, H, W = x.shape
L = H * W
x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
# create mask from init to forward
if self.shift_size > 0:
attn_mask = self.create_mask(H, W).to(x.device)
else:
attn_mask = None
shortcut = x
x = self.norm1(x)
x = x.view(B, H, W, C)
# cyclic shift
if self.shift_size > 0:
shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
else:
shifted_x = x
# partition windows
x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
# W-MSA/SW-MSA
attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
# merge windows
attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
# reverse cyclic shift
if self.shift_size > 0:
x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
else:
x = shifted_x
x = x.view(B, H * W, C)
# FFN
x = shortcut + self.drop_path(x)
x = x + self.drop_path(self.mlp(self.norm2(x)))
x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
if Padding:
x = x[:, :, :H_, :W_] # reverse padding
return x
class SwinTransformerBlock(nn.Module):
def __init__(self, c1, c2, num_heads, num_layers, window_size=8):
super().__init__()
self.conv = None
if c1 != c2:
self.conv = Conv(c1, c2)
# remove input_resolution
self.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size,
shift_size=0 if (i % 2 == 0) else window_size // 2) for i in
range(num_layers)])
def forward(self, x):
if self.conv is not None:
x = self.conv(x)
x = self.blocks(x)
return x
2.3 修改tasks.py
2.3.1 导包
from ultralytics.nn. SwinTransformer import SwinTransformer
2.3.2 注册
if m in (Classify, Conv, GGhostRegNet, ConvTranspose, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, Focus,BottleneckCSP, C1, C2, C2f, C3, C3TR, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x, RepC3, SEAttention,ContextAggregation, BoTNet, CBAM,LightConv,RepConv, SpatialAttention,Involution, CARAFE, VoVGSCSP, VoVGSCSPC,GSConv,HorBlock, SwinTransformer):
三、验证是否成功即可
执行命令
python train.py
示例如图:
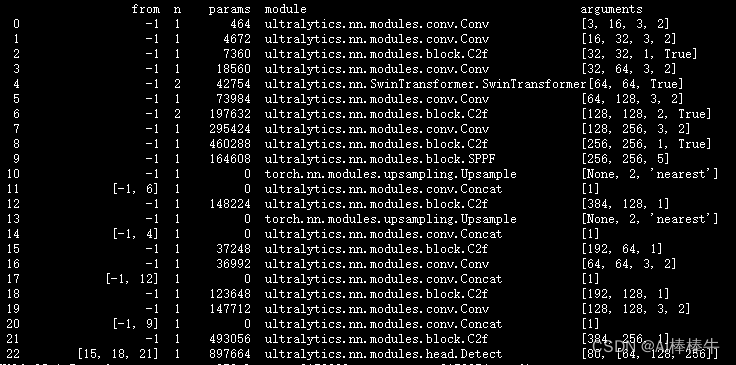
改完收工!