STM32F103C8T6的MODBUS-RTU通讯(485通讯)
1.功能简介
本次实验是使用STM32F103C8T6单片机的MODBUS-RTU通讯,通过串口助手的调试来获取寄存器的值并可以修改寄存器的值。
2.源码与资料(附有视频讲解)!!!!!!!
包括源码(KEIL5)和调试助手,看不懂程序还有老师视频手把手教学还等什么,还不心动吗!!!快上车吧!!!!!

链接:https://pan.baidu.com/s/1cWhJge_cqRfNOzAsogcqrw?pwd=NNNN
提取码:NNNN
本次实验应用的程序打开“源码资料”文件夹——打开“MODBUS源码资料”——打开“MODBUS资料”——打开“STM32-MODBUS程序”文件夹——打开“MODBUS从机成功文件夹”——打开“MODBUS从机2.0”程序即可
3.所需元器件
元器件清单

实物图
1 2 3 4




4.接线
4.1USB转串口线下载线
GND接GND
RXD接PA9
TXD接PA10
3V3接3.3V接口
4.2USB转485线
USB口与电脑的USB接口相连
端子部分


在端子部分的接线只需要T/R+和T/R-这两个端口,这两个端口根据图二的标识显示分别为A+与B-,这两个端子需要接到RS485转TTL串口模块的A与B接口即可。
4.3RS485转TTL串口模块

图中上面的A与B接口如同上文所说接相同的A+与B-即可。
图中下面部分的接口如下所示
VCC-单片机3.3v接口
GND-单片机GND接口
TXD-PA3接口
RXD-PA2接口
GND-单品机3.3V接口
注意!注意!在通讯时不要只接USB转485的线,记得要同时接上USB转TTL串口的线,不然单片机没有供电!!!!!
5.源码解析
5.1定时器
5.1.1Timer.C
定时器2初始化
#include "timer.h"
void Timer2_Init() //1ms产生1次更新事件
{
TIM_TimeBaseInitTypeDef timer;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
TIM_DeInit(TIM2);
timer.TIM_Period=1000-1;// 1ms
timer.TIM_Prescaler=72-1;// 72M/72=1MHZ-->1us
timer.TIM_ClockDivision=TIM_CKD_DIV1;
timer.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2,&timer);
TIM_Cmd(TIM2,ENABLE);
TIM_ITConfig(TIM2, TIM_IT_Update,ENABLE);
}
5.1.2Timer.h
#ifndef _timer_
#define _timer_
#include "stm32f10x_conf.h"
void Timer2_Init(void);
#endif
在主函数中写入了定时器2的中断服务子函数,1ms一次中断。
void TIM2_IRQHandler()//定时器2的中断服务子函数 1ms一次中断
{
u8 st;
st= TIM_GetFlagStatus(TIM2, TIM_FLAG_Update);
if(st==SET)
{
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
if(modbus.timrun!=0)
{
modbus.timout++;
if(modbus.timout>=8) //间隔时间达到了时间
{
modbus.timrun=0;//关闭定时器--停止定时
modbus.reflag=1; //收到一帧数据
}
}
}
}5.2串口初始化
在串口的口选择了PA2与PA3引脚
void RS485_Init()
{
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//GPIO_Mode_IN_FLOATING;//GPIO_Mode_AF_OD;//
GPIO_Init(GPIOA, &GPIO_InitStructure);
RS485_RT_0; //使MAX485芯片处于接收状态
//USART1_TX PB.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//GPIO_Mode_Out_PP;//GPIO_Mode_IN_FLOATING;//GPIO_Mode_AF_OD;//
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PB.11
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//GPIO_Mode_IPU;//
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart1 NVIC ??
USART_InitStructure.USART_BaudRate = 9600;//?????9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_DeInit(USART2);
USART_Init(USART2, &USART_InitStructure);
USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
USART_Cmd(USART2, ENABLE);
USART_ClearFlag(USART2,USART_FLAG_TC );
// GetAdd_rs485();
// RS485_IsrInit(); //485?????
}5.3CRC校验
CRC校验码
//==========================================
#include "modbusCRC.h"
/* CRC 高位字节值表 */
const uchar auchCRCHi[] = {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40
} ;
/* CRC低位字节值表*/
const uchar auchCRCLo[] = {
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06,
0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD,
0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,
0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A,
0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4,
0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3,
0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4,
0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,
0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29,
0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED,
0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60,
0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67,
0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,
0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68,
0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E,
0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71,
0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92,
0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,
0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B,
0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B,
0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42,
0x43, 0x83, 0x41, 0x81, 0x80, 0x40
} ;
/******************************************************************
功能: CRC16校验
输入:
输出:
******************************************************************/
uint crc16( uchar *puchMsg, uint usDataLen )
{
uchar uchCRCHi = 0xFF ; // 高CRC字节初始化
uchar uchCRCLo = 0xFF ; // 低CRC 字节初始化
unsigned long uIndex ; // CRC循环中的索引
while ( usDataLen-- ) // 传输消息缓冲区
{
uIndex = uchCRCHi ^ *puchMsg++ ; // 计算CRC
uchCRCHi = uchCRCLo ^ auchCRCHi[uIndex] ;
uchCRCLo = auchCRCLo[uIndex] ;
}
return ( uchCRCHi << 8 | uchCRCLo ) ;
}
5.4MODBUS功能码与发送函数
5.3.1MODBUS.C
主要的功能代码都在这个函数,其中modbus.init()函数中的设备地址为4在串口助手中的调试要记得改(如下图所示原来是1),不然调试不通!!!

另外两个函数则是写了我们在本次实验所需用到的两个功能码03功能码和06功能码。
MODBUS-RTU通讯共有如下图所示的功能码,在这次通讯中我们只需要读保持寄存器和写单个寄存器所以只用到了03和06功能码

最后一个函数则是单片机接收和写入数据的函数。具体函数的原理我就不过多赘述了,大家可以去资料里的视频中去了解。
#include "modbus.h"
#include "modbus_uart.h"
#include "modbusCRC.h"
MODBUS modbus;
extern u16 Reg[];
/*
因为波特率 9600
1位数据的时间为 1000000us/9600bit/s=104us
一个字节为 104us*10位 =1040us
所以 MODBUS确定一个数据帧完成的时间为 1040us*3.5=3.64ms ->10ms
*/
void Mosbus_Init()
{
modbus.myadd=4; //本从设备的地址
modbus.timrun=0; //MODbus定时器停止计时
RS485_Init();
}
void Modbud_fun3() //3号功能码处理 ---主机要读取本从机的寄存器
{
u16 Regadd;
u16 Reglen;
u16 byte;
u16 i,j;
u16 crc;
Regadd=modbus.rcbuf[2]*256+modbus.rcbuf[3]; //得到要读取的寄存器的首地址
Reglen=modbus.rcbuf[4]*256+modbus.rcbuf[5]; //得到要读取的寄存器的数量
i=0;
modbus.Sendbuf[i++]=modbus.myadd;//本设备地址
modbus.Sendbuf[i++]=0x03; //功能码
byte=Reglen*2; //要返回的数据字节数
//modbus.Sendbuf[i++]=byte/256; //
modbus.Sendbuf[i++]=byte%256;
for(j=0;j5.3.2MODBUS.H
#ifndef _modbus_
#define _modbus_
#include "stm32f10x_conf.h"
#define RS485_RT_1 GPIO_SetBits(GPIOA, GPIO_Pin_5) //485发送状态
#define RS485_RT_0 GPIO_ResetBits(GPIOA, GPIO_Pin_5) //485置接收状态
typedef struct
{
u8 myadd;//本设备的地址
u8 rcbuf[100]; //MODBUS接收缓冲区
u16 timout;//MODbus的数据断续时间
u8 recount;//MODbus端口已经收到的数据个数
u8 timrun;//MODbus定时器是否计时的标志
u8 reflag;//收到一帧数据的标志
u8 Sendbuf[100]; //MODbus发送缓冲区
}MODBUS;
extern MODBUS modbus;
void Mosbus_Init(void);
void Mosbus_Event(void);
#endif
5.5主函数
其中数组Reg[ ]中的值就是我们所需读写的值。
//#include "stm32f10x.h" // Device header
#include "timer.h"
#include "modbus_uart.h"
#include "modbus.h"
u16 Reg[]={0x0000, //本设备寄存器中的值
0x0001,
0x0002,
0x0007,
0x0004,
0x0005,
0x0006,
0x0007,
0x0008,
0x0009,
0x000A,
};
void delay(u32 x)
{
while(x--);
}
void Isr_Init()
{
NVIC_InitTypeDef isr;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); // a bbb
isr.NVIC_IRQChannel=TIM2_IRQn;
isr.NVIC_IRQChannelCmd=ENABLE;
isr.NVIC_IRQChannelPreemptionPriority=1;
isr.NVIC_IRQChannelSubPriority=2;
NVIC_Init(&isr); //
isr.NVIC_IRQChannel=USART2_IRQn;
isr.NVIC_IRQChannelCmd=ENABLE;
isr.NVIC_IRQChannelPreemptionPriority=1;
isr.NVIC_IRQChannelSubPriority=0;
NVIC_Init(&isr); //
}
void TIM2_IRQHandler()//定时器2的中断服务子函数 1ms一次中断
{
u8 st;
st= TIM_GetFlagStatus(TIM2, TIM_FLAG_Update);
if(st==SET)
{
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
if(modbus.timrun!=0)
{
modbus.timout++;
if(modbus.timout>=8) //间隔时间达到了时间
{
modbus.timrun=0;//关闭定时器--停止定时
modbus.reflag=1; //收到一帧数据
}
}
}
}
int main()
{
Timer2_Init();
Mosbus_Init();
Isr_Init();
while(1)
{
Mosbus_Event(); //处理MODbus数据
// RS485_byte('B');
}
}
6串口助手调试
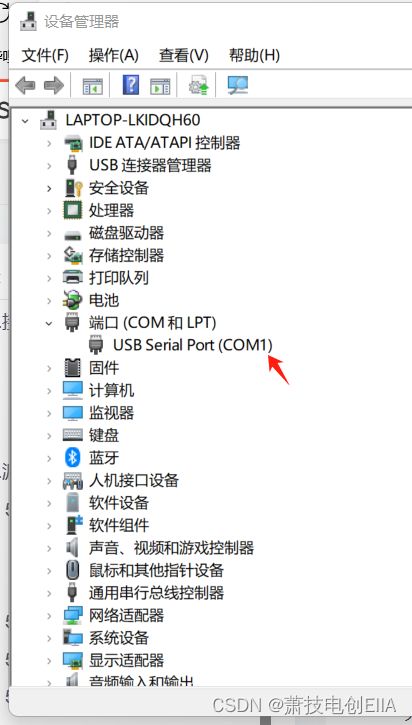
先在串口助手选对应的COM口并打开串口,不知道具体是哪个COM口的可以在设备管理器中找到。
之后将串口调试助手的设备地址改为4。

之后即可开始读写操作
读操作例:

寄存器地址就是主函数中的REG数组,地址0就是第1个数,这里的地址3就是第4个数0x07,而数量就是一次性要读出多少个数组。

读出之后发送端会显示如下图所示,04则是之前的设备地址,03是功能码,后面则是两位为一组,00 03 则表示寄存器地址是3,00 01则表示要读出的数量,最后面两位则是CRC校验码。
如果通讯成功,在下面的接收区则会接收到单片机发来的数据,如果没有接收到数据则要检查接线是否错误。
在上面的写寄存器区也是相同的操作,不过的是一次只能写入单个寄存器,同样如果写入成功则会接收到单片机发回的值。
如果操作成功大家可以反复先读取再写入然后再次读取去验证数值是否已经被修改完成。
By:凌浩