单片机控制步进电机
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、步进电机的工作原理是什么?
- 二、连线图
- 三、程序
-
- 1.参考程序
- 2.实际测试
- 四、开发板
-
- 1.原理图
- 2.实际连接图
- 3.参考程序
- 4.测试
- 5. 思考
- 五、步距角
- 总结
前言
提示:这里可以添加本文要记录的大概内容:
之前学习了单片机控制直流电机,下一步我们一起来学习如何控制步进电机
提示:以下是本篇文章正文内容,下面案例可供参考
一、步进电机的工作原理是什么?
电机怎么控制转多少度!原理最容易理解的电机!步进电机的工作原理!
https://www.bilibili.com/video/BV1cN4y197TG/?spm_id_from=333.337.search-card.all.click
常用驱动器
一分钟学会控制步进电机
https://www.bilibili.com/video/BV11h4y1V7vK/?spm_id_from=333.337.search-card.all.click
51单片机控制步进电机输出一定的角度、转速和转向(可提供源代码)
https://www.bilibili.com/video/BV1Dq4y1E7Xj/?spm_id_from=333.337.search-card.all.click
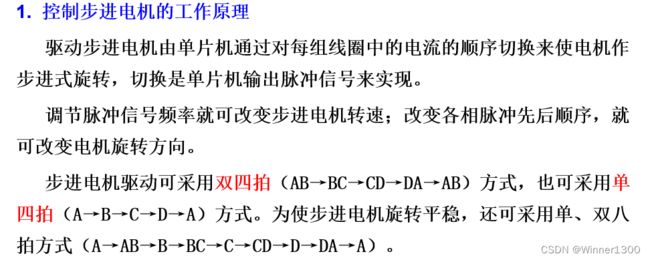
ABCD A-AB-B-BC-C-CD-D-DA-A 有字母就是1 否则是0
1000 1100 0100 0110 0010 0011 0001 1001
0x80 0xc0 0x40 0x06 0x02 0x03 0x01 0x09

双四拍,一次给两个1: ABCD 1001 1100 0110 0011 ->1001
单四拍,一次只给一个1:ABCD 1000 0100 0010 0001 ->1000
单双八拍, 1001 1000 1100 0100 0110 0010 0011 0001 ->1001
根据我们看到步进电机的原理,电池很忙,才能让步进电机按照顺序转起来
从左往右给脉冲正转, 从右往左就是反转。


ULN2003绿色板资料下载链接:https://pan.baidu.com/s/1EqgUEpMWoq91wRWK6gaang
提取码:8888
ULN2003蓝色板资料下载链接:https://pan.baidu.com/s/1r9JF2EX3bA3JRBuEZfW5Gg
提取码:8888
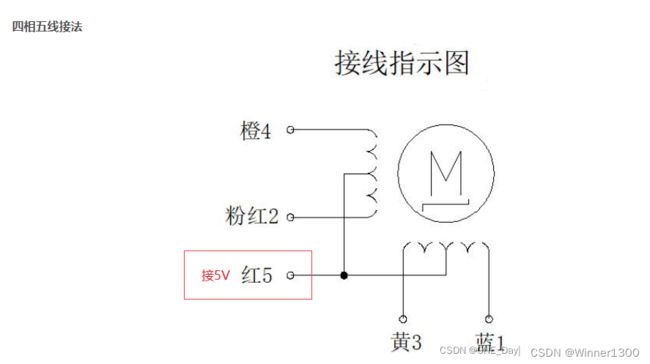
二、连线图



三、程序
1.参考程序
代码如下(示例):
unsigned char ta[4]={0x01,0x02,0x04,0x08};
void delay(unsigned char ms)
{
//
for(x=0;x<ms;x++)
{
for(y=0;y<100;y++);
}
}
void main()
{
while(1)
{
for(i=0;i<4;i++)//正转
{
P1=ta[i];
delay(1);
}
for(i=0;i<4;i++)//反转
{
P1=ta[3-i];
delay(1);
}
}
}
2.实际测试
四、开发板
1.原理图

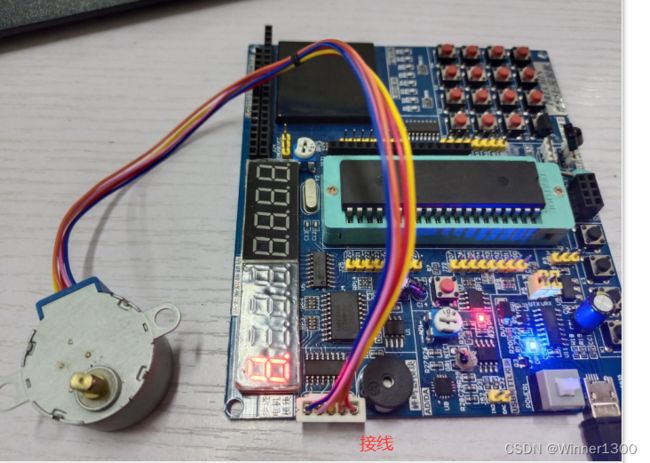
2.实际连接图
3.参考程序
#include 4.测试
5. 思考
1.控制步进电机转速
2.控制步进电机方向
3. 控制步进电机转动指定角度
加入按键?
按键1 :控制正反
按键2: 速度
按键3:角度 90度
程序框架
#include 五、步距角

步距角: 5.625度
转360度: 360/5.625=64 , 64一圈
由于有减速箱:1/64
所以实际想要转一圈需要 : 64*64=4096个脉冲


实际计算:根据八拍来运行
步距角: 5.625度
转360度: 360/5.625=64 , 64一圈
由于有减速箱:1/32 (实际算得减速比是32)
所以实际想要转一圈需要 : 32*64=2048个脉冲
参考程序:
#include