(论文阅读)Non-Intrusive Load Monitoring by Load Trajectory and Multi-Feature Based on DCNN
Publisher: IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS
Date: OCTOBER 2023
Author and affiliation: Hui Yin, Kaile Zhou, and Shanlin Yang are with the School of Management, Hefei University of Technology
1. Overview
this article proposes a novel NILM framework with power load trajectory and feature
augmentation based on DCNN.
The power load trajectory is first encoded with time information to construct feature maps containing the appliances’ power variation and temporal information. Finally, tuned DCNN
model containing very few parameters is used to achieve NILM.
Contributions:
1. For the NILM tasks, the power load trajectory is used, which is more valuable to be collected and used for demand side management (DSM) compared with other device electronic signatures.
2. The appliance operation states’ temporal features are transferring and added to the raw power load trajectory. Solving the problem that time-domain information is lost in dimensionality reduction in DCNN.
3. A DCNN model containing very few parameters is developed to perform NILM,which facilitates the deployment of the NILM framework in smart meters with limited storage space and computational capability.
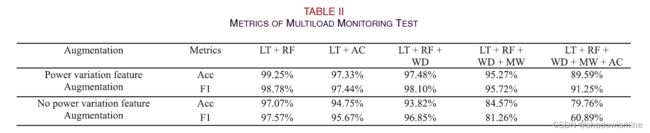
4. The proposed power variation feature augmentation improves the accuracy by almost 10% just using the power load trajectory.
2. Methodology
The NILM framework contains the power load trajectory acquisition and preprocessing, temporal feature transferring and augmentation, and DCNN model generation and NILM implementation.

2.1 Data Preprocessing
The collected data is first divided into small segments by the sliding windows.
Afterwards, the data within the windows is standarized.
Finally, the power load image will be labeled, and the dataset will be segmented.
2.2 Feature Extraction
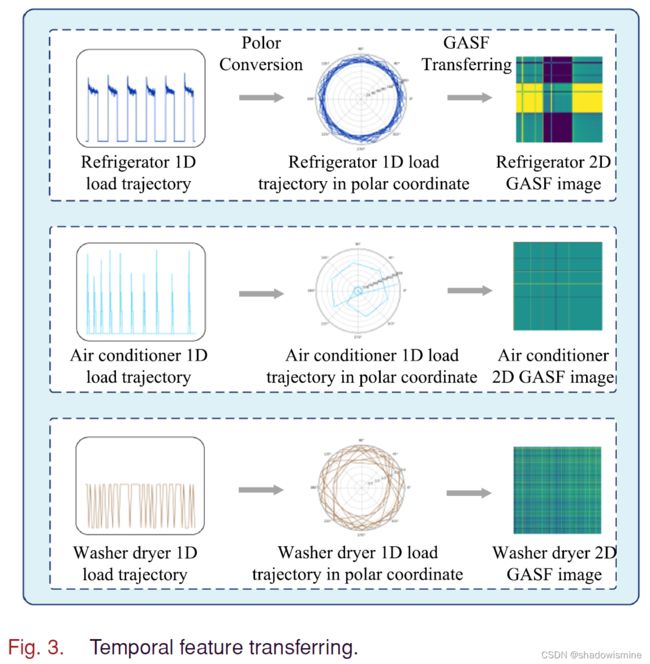
The data is transformed by GASF and the temporal features are encoded into the load trajectory to form a 2-D image containing temporal features. GASF is designed to encode 1-D time series into 2-D images with cosine correlation and has the advantage of preserving the time stamp information.
Firstly, the time series power load trajectory X should be rescaled so that all values fall in the
interval [−1, 1] as

Then, the rescaled time power load trajectory X˜ can be represented in polar coordinates.
The value is encoded as the angular cosine and the timestamp is encoded as the radius, with

ti is the time stamp and N is a constant factor to regularize the span of the polar coordinate system.
By encoding the power load trajectory in this way, the temporal features will be encoded onto the 2-D GASF image. The GASF is defined as follows:

where I is the unit row vector, function f(·) is the square root computation of the vector.
The transcoded power load trajectory contains temporal correlation by superimposing the direction relative to the time interval.
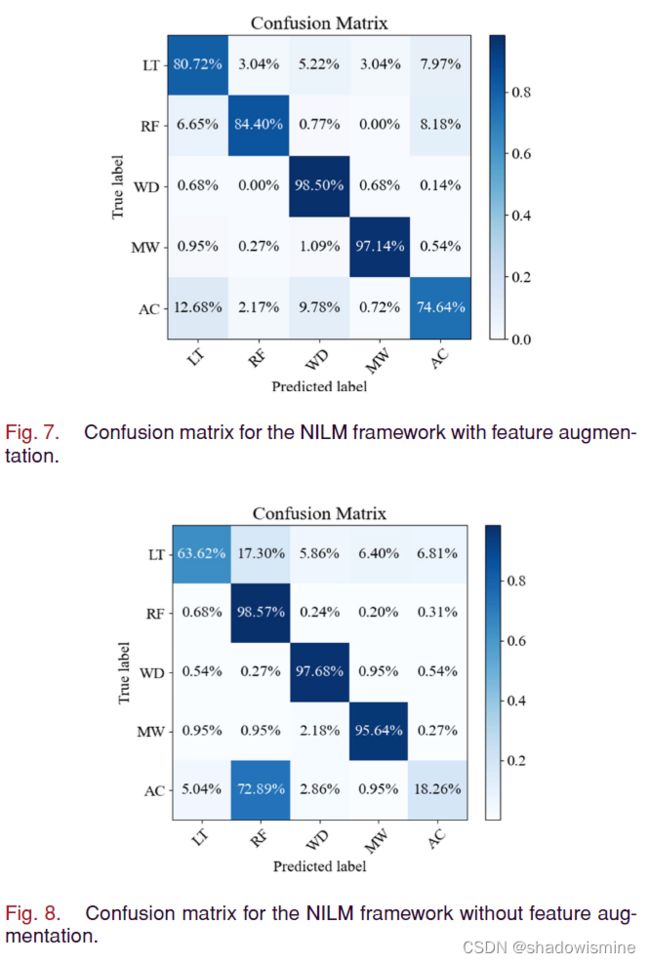
After the GASF encoding, the three-channel RGB images in temporal power signatures are obtained. To reduce the impact of data normalization in GASF, this article proposes a feature
augmentation method, power variation feature augmentation.
The enhancement of the three-color channels in RGB color space by the original load features
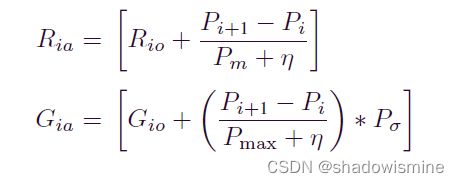
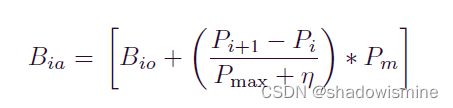
where (·)io is the original color value within the ith pixel, (·)ia is the color value within the ith pixel after data enhancement. Pi is the corresponding power data within the ith pixel, Pm is the mean power value within the time window, Pσ is the standard deviation of power within the time window, and Pmax is the maximum power value within the time window. And [·] is the value within the downward rounding brackets.

2.3 DCNN Model Generation for the Estimator

2.3 Experiment and Results