ubuntu20.04下安装mujoco、mujoco-py、gym
目录
1 安装mujoco
第一步:
之后所有的操作都在 marl 这个环境下进行!!
第二步:
第三步:
第四步:测试
2 安装mujoco-py
第一步:
第二步:
第三步:
第四步:测试
3 安装gym
4 可能出现的报错及解决方法:
报错:
报错:
报错:
报错:
报错:
1 安装mujoco
第一步:
创建一个conda环境:
conda create --name=环境名称 python=3.8进入该环境:(我定义的环境名称为marl,大家根据各自的环境名称更改指令)
conda activate marl之后所有的操作都在 marl 这个环境下进行!!
第二步:
进入官网:https://github.com/openai/mujoco-py
点击图中的蓝色Linux下载
将下载的文件解压至目录 "~/.mujoco/mujoco210" 中,确保bin等文件在"~/.mujoco/mujoco210" 中
第三步:
配置.bashrc环境文件
gedit ~/.bashrc在文档最后一行加入下面代码然后保存退出文档
export LD_LIBRARY_PATH=~/.mujoco/mujoco210/bin更新配置
source ~/.bashrc第四步:测试
cd ~/.mujoco/mujoco210/bin
./simulate ../model/humanoid.xml若出现下图的界面,则mujoco安装成功

2 安装mujoco-py
第一步:
下载mujoco-py,在根目录下,打开终端(确保在marl这个conda环境中)输入
git clone https://github.com/openai/mujoco-py.git第二步:
依次执行下面的指令进行安装
cd ~/mujoco-pypip3 install -U 'mujoco-py<2.2,>=2.1'
pip3 install -r requirements.txt
pip3 install -r requirements.dev.txt
python3 setup.py install
第三步:
配置环境文件
gedit ~/.bashrc
在最后添加下面代码然后保存退出文档
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/nvidia
更新配置:
source ~/.bashrc
第四步:测试
依次执行:
cd ~/mujoco-py/examplespython body_interaction.py若出现下图的界面,则mujoco安装成功 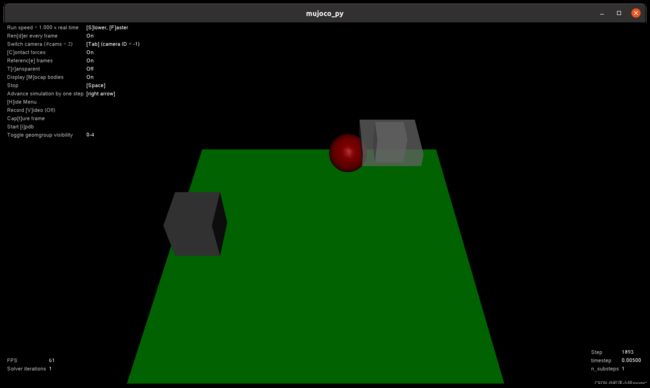
3 安装gym
pip install gymgit clone https://github.com/openai/gym
或者
git clone git://github.com/openai/gym运行代码来添加环境
cd gym
pip install -e .接下来安装gym的所有环境,运行以下代码
pip install -e .[all]
# 如果超时,换用下面的命令
pip install -e .[all] -i https://pypi.tuna.tsinghua.edu.cn/simple出现错误:
Building wheels for collected packages: box2d-py, gym
Building wheel for box2d-py (setup.py) ... error
error: subprocess-exited-with-error
× python setup.py bdist_wheel did not run successfully.
│ exit code: 1
╰─> [16 lines of output]
Using setuptools (version 68.0.0).
running bdist_wheel
running build
running build_py
creating build
creating build/lib.linux-x86_64-cpython-38
creating build/lib.linux-x86_64-cpython-38/Box2D
copying library/Box2D/Box2D.py -> build/lib.linux-x86_64-cpython-38/Box2D
copying library/Box2D/__init__.py -> build/lib.linux-x86_64-cpython-38/Box2D
creating build/lib.linux-x86_64-cpython-38/Box2D/b2
copying library/Box2D/b2/__init__.py -> build/lib.linux-x86_64-cpython-38/Box2D/b2
running build_ext
building 'Box2D._Box2D' extension
swigging Box2D/Box2D.i to Box2D/Box2D_wrap.cpp
swig -python -c++ -IBox2D -small -O -includeall -ignoremissing -w201 -globals b2Globals -outdir library/Box2D -keyword -w511 -D_SWIG_KWARGS -o Box2D/Box2D_wrap.cpp Box2D/Box2D.i
error: command 'swig' failed: No such file or directory
[end of output]
note: This error originates from a subprocess, and is likely not a problem with pip.
ERROR: Failed building wheel for box2d-py
Running setup.py clean for box2d-py
Building editable for gym (pyproject.toml) ... done
Created wheel for gym: filename=gym-0.26.2-0.editable-py3-none-any.whl size=4276 sha256=d500f2aace1313b1e6edeef6688a35cd77a0fe742c6e746285ae58b582fc207b
Stored in directory: /tmp/pip-ephem-wheel-cache-1rf846yu/wheels/ee/8a/f5/ed98d4005e8172d461a18b6aa8147e52bb0a5dad276b12a2c2
Successfully built gym
Failed to build box2d-py
ERROR: Could not build wheels for box2d-py, which is required to install pyproject.toml-based projects解决方法:
sudo apt-get install swig build-essential python-dev python3-dev再次安装
pip install -e .[all]若无报错,则gym安装完成
4 可能出现的报错及解决方法:
报错:
Cython.Compiler.Errors.CompileError: /home/qjm/anaconda3/envs/hiro/lib/python3.8/site-packages/mujoco_py/cymj.pyx
解决方法:
pip install "cython<3"报错:
ERROR: GLEW initalization error: Missing GL version
解决方法:
sudo gedit ~/.bashrc在打开的文件最后一行添加:
export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so保存并关闭,然后执行:
source ~/.bashrcsudo apt-get install libglew-devsudo apt-get install libglfw3 libglfw3-dev报错:
缺少GL/osmesa.h文件,由此引起:distutils.errors.CompileError: command ‘gcc’ failed with exit status 1
sudo apt install libosmesa6-dev报错:
FileNotFoundError: [Errno 2] No such file or directory: 'patchelf'
sudo apt-get update -y
sudo apt-get install -y patchelfPython安装第三方库报错:"These Packages Do Not Match The Hashes From The Requirements File."
原因:通常是因为网速问题导致的下载错误,导致对应的哈希值不匹配。
解决方法:需要在pip时,添加"--default-timeout=100000"
pip install --default-timeout=100000 要安装的库名称报错:
AttributeError: module ‘gym‘ has no attribute
卸载gym:
pip uninstall gym安装低版本gym:
pip install gym==0.9.0 -i https://pypi.douban.com/simple