DELMIA软件:使用机器人本体语言示教编程
本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
DELMIA软件中,除了使用Teach a device功能对机器人进行示教编程以外,还可以通过使用Native Robot Language Teach(NRL)功能对机器人进行编程,使用NRL功能示教编写出的机器人程序与真实的机器人程序是一模一样的,所以NRL功能也被称为机器人本体语言编程。本期,就来为大家介绍一下使用NRL功能进行机器人示教编程。
打开机器人离线编程模块
在“Device Task Definition”模块中创建好机器人工作站,如下图中的简易机器人工作站。本例从DELMIA软件自带的机器人库中添加了一个FANUC的R2000iA-165F机器人,并在机器人上安装了一个抓手工具。

机器人本体语言编程是在DELMIA软件的机器人离线编程模块中实现的,“开始”菜单下栏下,依次点击“资源详细信息”→“Robot Offline Programming”,进入机器人离线编程模块。
机器人本体语言编程功能
点击右侧工具条中的“Native Robot Language Teach”![]() 命令按钮,然后点击左侧项目树中的机器人资源节点,弹出NRL Teach对话框,这就是机器人本体语言示教器。
命令按钮,然后点击左侧项目树中的机器人资源节点,弹出NRL Teach对话框,这就是机器人本体语言示教器。
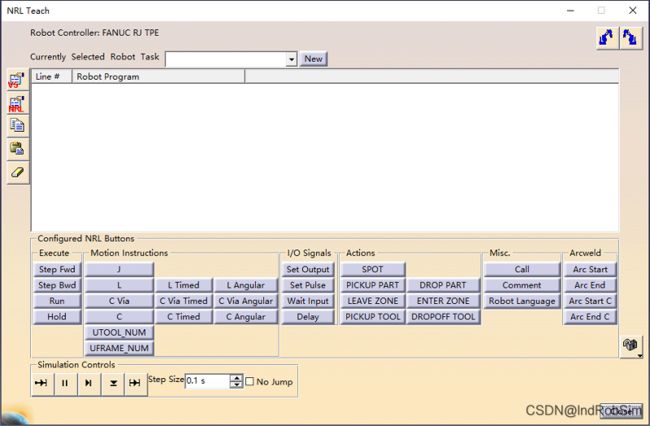
与Device Task Definition模块中的“Teach a device”示教器不同,使用NRL Teach示教器编程能够直接示教编写出机器人本体语言程序。工作站中添加不同品牌的机器人本体,NRL Teach示教器界面也会显示出不同的编程指令,有关机器人本体编程指令的信息都被记录在机器人的控制器当中。当然,DELMIA软件版本越高,机器人库就会越完善,相应的机器人控制器系统版本也会越高,NRL Teach示教器中支持的机器人指令也会越丰富。
机器人示教编程
首先,创建机器人运行任务。点击Currently Selected Robot Task后的“New”命令按钮,在弹出的Create New Robot Task对话框中输入机器人任务名称,创建机器人运行任务。
点击“Motion Instructions”功能区下的机器人运动指令,如关节运动指令“J”,在弹出的J Command Button Dialog对话框中可以设置机器人运动指令参数,如点位数据格式、点位编号、运行速度、转弯形式等,设置完成点击“确定”按钮。

在弹出的V5 Motion Options对话框中,可以设置机器人目标点类型、参考坐标系等参数,如目标点作为过渡点或是工艺点,机器人工具坐标系(TCP)、用户坐标系等。这里可以点击“Jog”按钮,在弹出的机器人手动运行对话框中,移动机器人到合适位置作为示教点位。当然,也可以勾选“Move To Existing Tag/Fastener”选项,然后选择已经设置好的机器人目标点位坐标,作为机器人示教点位。设置完成后点击“Record”按钮,机器人点位被添加,一条运动程序示教完成。

此时,在NRL Teach示教器的程序预览框中显示示教好的机器人程序。可以看到,示教好的程序与真实的机器人语言程序是一样的。

在NRL Teach示教器中可以点击程序预览框左侧的“Display V5 Properties of Selected Statement”![]() 工具按钮,对机器人程序属性进行修改,支持修改的参数选项与上一步V5 Motion Options对话框中的参数选项一致。
工具按钮,对机器人程序属性进行修改,支持修改的参数选项与上一步V5 Motion Options对话框中的参数选项一致。

也可以点击“Display NRL Properties of Selected Statement”![]() 工具按钮,修改机器人本体语言命令,修改参数选项与J Command Button Dialog对话框中的参数选项一致。
工具按钮,修改机器人本体语言命令,修改参数选项与J Command Button Dialog对话框中的参数选项一致。
除此之外,还可以通过“Copy Selected NRL Statement”![]() 工具、“Paste NRL Statement”
工具、“Paste NRL Statement”![]() 工具、“Delete Selected NRL Statement”
工具、“Delete Selected NRL Statement”![]() 工具,对示教好的机器人本体语言程序进行复制、粘贴或删除操作。
工具,对示教好的机器人本体语言程序进行复制、粘贴或删除操作。
NRL Teach示教器中,除了可以示教机器人运动程序以外,还可以编写I/O信号逻辑程序,工艺指令程序以及程序调用等,如点焊指令程序“SPOT”、弧焊指令“Arc Start”等,编写出的程序与真实的机器人程序也是一样的,这里不再赘述。
机器人程序仿真运行
编写完的机器人程序,可以通过示教器中Execute功能区下的功能选项进行仿真运行,其中“Step Fwd”是单步前进操作,“Step Bwd”是单步后退操作,“Run”是全部运行操作、“Hold”是暂停运行操作,这些操作与真实的机器人示教器手动运行功能也是一致的。
也可以通过Simulation Controls功能区下的操作按钮对机器人程序进行仿真运行,相关的功能与Device Task Definition模块中的“Teach a device”示教器中的仿真运行功能是一样的。
机器人程序离线导出与导入
NRL Teach示教器中可以通过“Download Robot Program”![]() 命令或“Upload Robot Program”
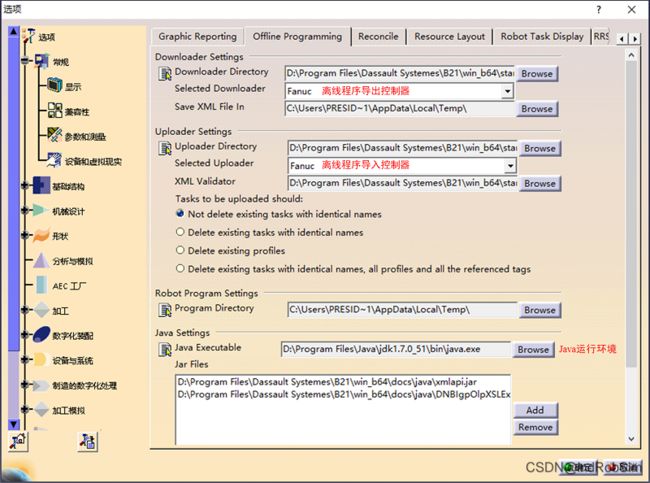
命令或“Upload Robot Program”![]() 命令,对示教好的机器人程序进行导出或外部程序导入。操作步骤与之前讲过的机器人离线程序导出与导入操作是一样的。需要注意的是,机器人离线程序导出或导入之前,需要事先在DELMIA软件选项中,设置好与机器人本体品牌一致的控制器类型,以及Java运行环境。
命令,对示教好的机器人程序进行导出或外部程序导入。操作步骤与之前讲过的机器人离线程序导出与导入操作是一样的。需要注意的是,机器人离线程序导出或导入之前,需要事先在DELMIA软件选项中,设置好与机器人本体品牌一致的控制器类型,以及Java运行环境。
The End
上一篇:DELMIA软件:机器人固定点焊仿真