【STM32】STM32F407读取AS5047P磁编码器芯片数据(SPI)
此贴为问题记录贴:
1.AS5047P芯片介绍
以下摘自官网:
特征
- 最高28krpm
- DAEC™动态角度误差补偿
- 14位核心分辨率
- 对外部杂散磁场免疫
- 12位增量脉冲计数
- 零位,配置可编程
- ABI可编程十进制和二进制脉冲计数:1000、500、400、300、200、100、50、25、1024、512、256 ppr
- 独立的输出接口:SPI,ABI,UVW,PWM
2.问题记录
1.使用硬件SPI配置未读取到数据
下面是STM32F407硬件SPI的配置。使用的是硬件NSS管脚,使用硬件NSS时,需要注意几个地方。一个是在结构体中初始化硬件NSS管脚,即SPI_InitStructure.SPI_NSS = SPI_NSS_Hard; 其次,还要调用SPI_SSOutputCmd(SPI1, ENABLE);这个函数来允许控制NSS脚。还有一个地方来源于其他文章参考,在初始化SPI之前调用SPI_Cmd(SPI1, DISABLE)函数关闭,否则有可能不成功。在读写操作时候,SPI_Cmd(SPI1,ENABLE)相当于拉低NSS脚,等价于CS=0,SPI_Cmd(SPI1,DISABLE)相当于拉高NSS脚。采用3.3V供电,并且5V和3.3V已经连接在一起。
// SPI1_NSS PA4
// SPI1_SCK PA5
// SPI1_MISO PA6
// SPI1_MOSI PA7
void SPI1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);//使能SPI1时钟
//GPIOFB3,4,5初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;//PB3~5复用功能输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
GPIO_PinAFConfig(GPIOA,GPIO_PinSource4,GPIO_AF_SPI1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource5,GPIO_AF_SPI1); //PB3复用为 SPI1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource6,GPIO_AF_SPI1); //PB4复用为 SPI1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource7,GPIO_AF_SPI1); //PB5复用为 SPI1
//这里只针对SPI口初始化
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,ENABLE);//复位SPI1
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,DISABLE);//停止复位SPI1
SPI_Cmd(SPI1, DISABLE); //失能SPI外设
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_16b; //设置SPI的数据大小:SPI发送接收8位帧结构
// CPOL=0, CPHA=1
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Hard; //NSS信号由硬件(NSS管脚)控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
//SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_SSOutputCmd(SPI1, ENABLE); //硬件NSS使能
}
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u16 SPI1_ReadWriteByte(u16 TxData)
{
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET){}//等待发送区空
SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个byte 数据
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET){} //等待接收完一个byte
return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
}
/*-------------------------------------
* 函数名 :A5047_Read
* 参数 :无
* 返回值 :读取磁编码芯片的值
* 描述 :使用硬件SPI2磁编码芯片的角度
---------------------------------------*/
u16 A5047_Read(void)
{
u16 data=0;
SPI_Cmd(SPI1,ENABLE);//选中SPI,Nss拉低
// data [15] [14] [13:0]
// PARC R/W Adress
SPI1_ReadWriteByte(0xffff);//发送命令1111 1111 1111 1111
SPI_Cmd(SPI1,DISABLE);
return data&0x3fff ;
}下面是使用硬件NSS管脚采集到的SPI波形(见图1),有两种情况,主机输出正常,从机返回0x3fff或者0x0000,把径像充磁的小磁铁放在芯片正上方,数据不变化。阅读芯片手册SPI相关介绍部分,仔细对比SPI的模式配置,也没有发现问题(见图2)。遂放弃硬件NSS。
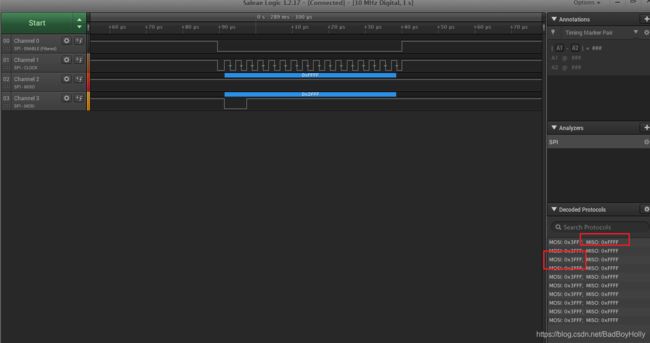 图1 逻辑分析仪抓到的SPI数据
图1 逻辑分析仪抓到的SPI数据
 图2 AS5047P的SPI说明
图2 AS5047P的SPI说明
2.使用软件NSS得到不正常数据
相比于硬件NSS,软件NSS主要变化有几点。这里参考的是正点原子的例程。 出来几个数据,但是好像都不是很正确.
u16 A5047_Read(void)
{
//int i=0;
u16 data=0;
//SPI_Cmd(SPI1,ENABLE);//选中SPI,Nss拉高
NSS_Soft = 0;
//delay_us(1);
// data [15] [14] [13:0]
// PARC R/W Adress
//SPI1_ReadWriteByte(0xffff);//发送命令1111 1111 1111 1111
SPI1_ReadWriteByte(0xffff); //发送指令
data = SPI1_ReadWriteByte(0x3fff); //等待数据
NSS_Soft = 1;
return data&0x3fff ;
} 通过串口打印的数据如下
 图3 杂乱的数据
图3 杂乱的数据
以下是调试用的硬件。
图4 调试用硬件
2021年4月5日更新: 问题已经找到,使用杜邦线和不稳定电源造成数据丢失,因此,应该使用抗干扰的IIC硬件设计,此外,可以降低IIC总线的时钟速度。