【嵌入式实战分享】模块篇 NRF24L01
目录
- 项目背景
- 模块介绍
-
- 1、引脚说明
- 2、使用介绍
- 3、电路结构
- 4、驱动代码
- 5、应用编程
- 使用总结
-
- 1.问题描述
- 2.原因分析
项目背景
通过2.4G发送和接收信息,要求一主多从
模块介绍
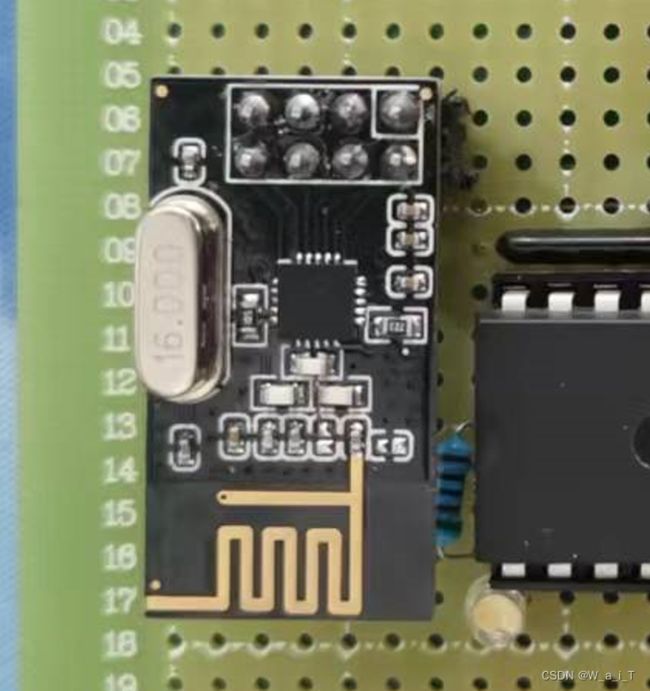
1、引脚说明
本模块引脚较多,如果要接都邦线的话可能会比较繁琐,最好有自己的测试板。
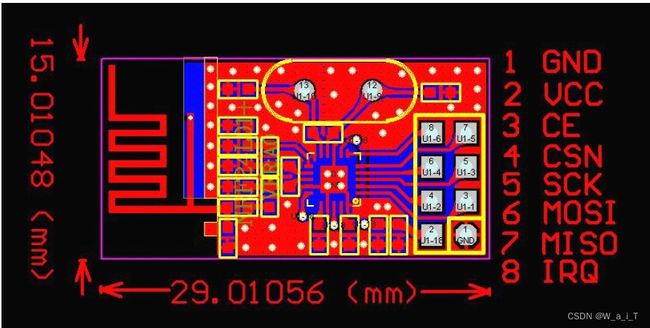
在这里呢,由于时间因素,我没有去进行PCB的设计和打板,而实随手焊接了一个洞洞板,足矣!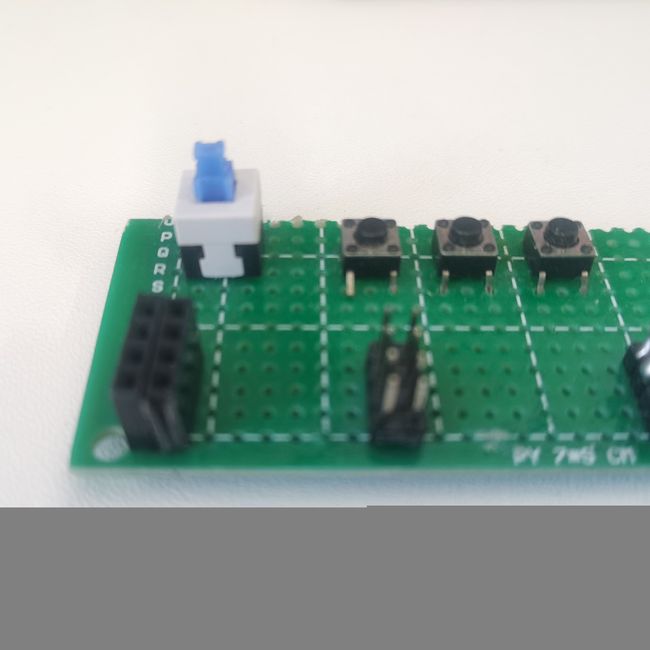
他的引脚虽多,但是主要功能主要分为电源类、通讯协议类和射频信号类

抛开电源和通讯协议的相关引脚,这些引脚其实就剩下了两个:一个用于使能模块,一个是模块的中断信号,如果大家已经掌握了SPI协议的话,使用这个模块是很好上手的。
2、使用介绍
关于这个模块,它再物联网场合应用甚广,先说我们使用者关心的:
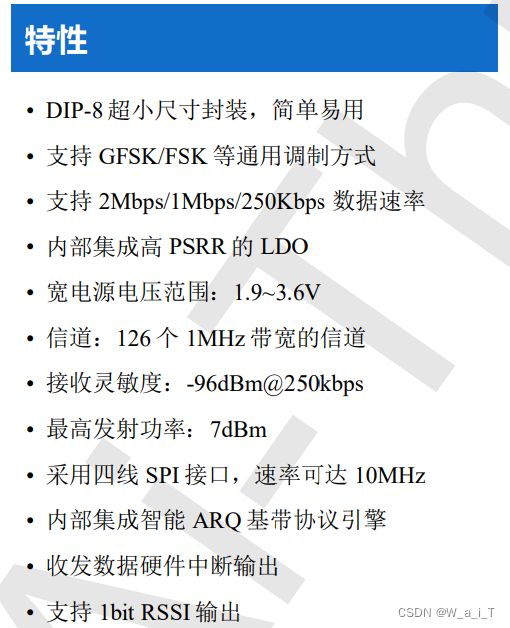
在这里呢,一定要注意它的工作电压和平均工作电流!!!对电流“敏感”,切勿热插拔(尖峰电流),以免造成损坏。
3、电路结构
整个模块最核心的主要是他的2.4G芯片,大致结构如下
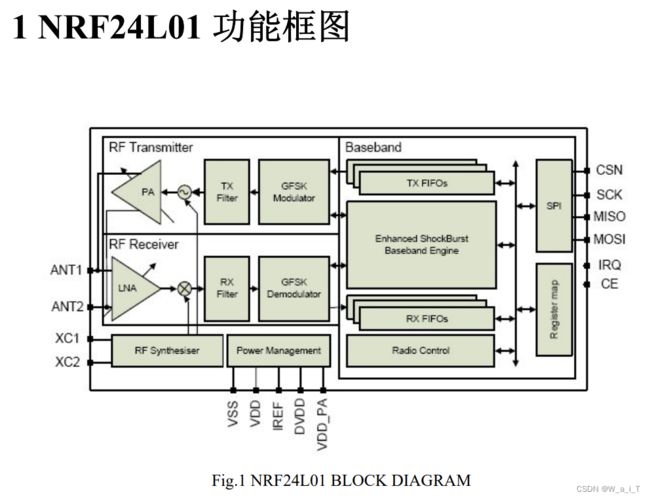
关于他的内部原理图呢,我们只需要简单了解,不需要去理解。但是可以根据原理图推断出引脚的主要作用:
CSN:芯片的片选线,CSN 为低电平芯片工作。
SCK:芯片控制的时钟线(SPI 时钟)
MISO:芯片控制数据线(Master input slave output)
MOSI:芯片控制数据线(Master output slave input)
IRQ:中断信号。无线通信过程中 MCU 主要是通过 IRQ 与 NRF24L01 进行通信。
CE: 芯片的模式控制线。 在 CSN 为低的情况下,CE 协同 NRF24L01 的 CONFIG 寄
存器共同决定 NRF24L01 的状态(参照 NRF24L01 的状态机)。
那么什么是NRF24L01状态机呢?
对于 NRF24L01 的固件编程工作主要是参照NRF24L01 的状态机。主要有以下几个状态
Power Down Mode:掉电模式
Tx Mode:发射模式
Rx Mode:接收模式
Standby-1Mode:待机 1 模式
Standby-2 Mode:待机 2 模式
如图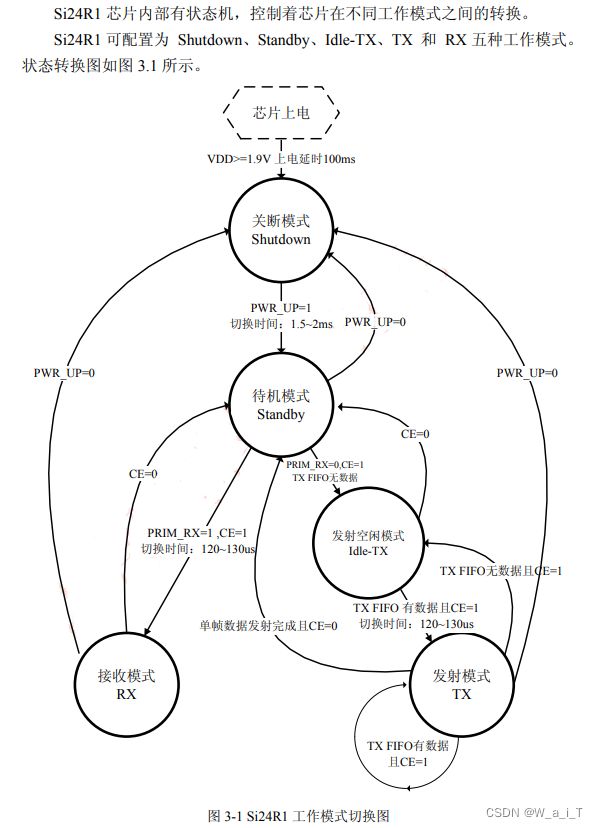
下面是对这些模式的介绍
Shutdown 工作模式
在 Shutdown 工作模式下,Si24R1 所有收发功能模块关闭,芯片停止工作,
消耗电流最小,但所有内部寄存器值和 FIFO 值保持不变,仍可通过 SPI 实现对
寄存器的读写。设置 CONFIG 寄存器的 PWR_UP 位的值为 0,芯片立即返回到
Shutdown 工作模式。
Standby 工作模式。
在 Standby 工作模式,只有晶体振荡器电路工作,保证了芯片在消耗较少电
流的同时能够快速启动。设置 CONFIG 寄存器下的 PWR_UP 位的值为 1,芯片
待时钟稳定后进入 Standby 模式。芯片的时钟稳定时间一般为 1.5~2ms,与晶振
的性能有关。当引脚 CE=1 时,芯片将由 Standby 模式进入到 Idle-TX 或 RX 模
式,当 CE=0 时,芯片将由 Idle-TX、TX 或 RX 模式返回到 Standby 模式。
Idle-TX 工作模式
在 Idle-TX 工作模式下,晶体振荡器电路及时钟电路工作。相比于 Standby
模式,芯片消耗更多的电流。当发送端 TX FIFO 寄存器为空,并且引脚 CE=1
时,芯片进入到 Idle-TX 模式。在该模式下,如果有新的数据包被送到 TX FIFO
中,芯片内部的电路将立即启动,切换到 TX 模式将数据包发送。
在 Standby 和 Idle-TX 工作模式下,所有内部寄存器值和 FIFO 值保持不变,
仍可通过 SPI 实现对寄存器的读写。
TX 工作模式
当需要发送数据时,需要切换到 TX 工作模式。芯片进入到 TX 工作模式的
条件为:TX FIFO 中有数据, CONFIG 寄存器的 PWR_UP 位的值为 1,PRIM_RX
位的值为 0,同时要求引脚 CE 上有一个至少持续 10us 的高脉冲。芯片不会直接
由 Standby 模式直接切换到 TX 模式,而是先立即切换到 Idle-TX 模式,再由
Idle-TX 模式自动切换到 TX 模式。Idle-TX 模式切换到 TX 模式的时间为
120us~130us 之间,但不会超过 130us。单包数据发送完成后,如果 CE=1, 则由
TX FIFO 的状态来决定芯片所处的工作模式,当 TX FIFO 还有数据,芯片继续
保持在TX工作模式,并发送下一包数据;当TX FIFO没有数据,芯片返回Idle-TX
模式;如果 CE=0,立即返回 Standby 模式。数据发射完成后,芯片产生数据发
射完成中断。
RX 工作模式
当需要接收数据时,需要切换到 RX 工作模式。芯片进入到 RX 工作模式的
条件为:设置寄存器 CONFIG 的 PWR_UP 位的值为 1,PRIM_RX 位的值为 1,
并且引脚 CE=1。芯片由 Standby 模式切换到 RX 模式的时间为 120~130us。当接
收到数据包的地址与芯片的地址相同,并且 CRC 检查正确时,数据会自动存入
RX FIFO,并产生数据接收中断。芯片最多可以同时存三个有效数据包,当 FIFO
已满,接收到的数据包被自动丢掉。
在接收模式下,可以通过 RSSI 寄存器检测接收信号功率。当接收到的信号
强度大于-60dBm 时,RSSI 寄存器的 RSSI 位的值将被设置为 1。否则,RSSI=0。。
RSSI 寄存器的更新方法有两种:当接收到有效的数据包后,RSSI 会自动更新,
此外,将芯片从 RX 模式换到 Standby 模式时 RSSI 也会自动更新。RSSI 的值会
随温度的变化而变化,范围在±5dBm 以内
4、驱动代码
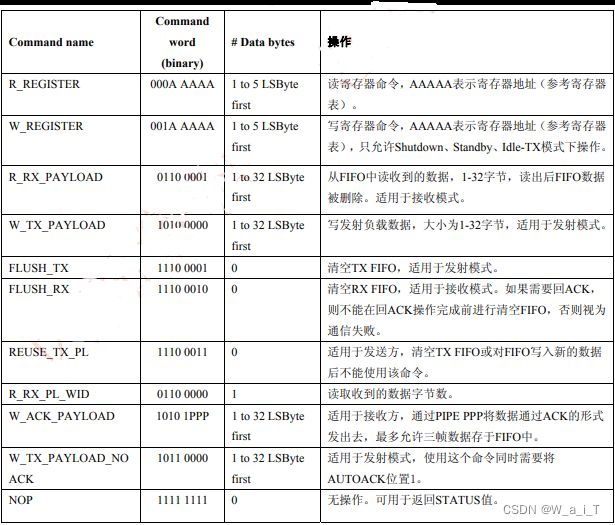
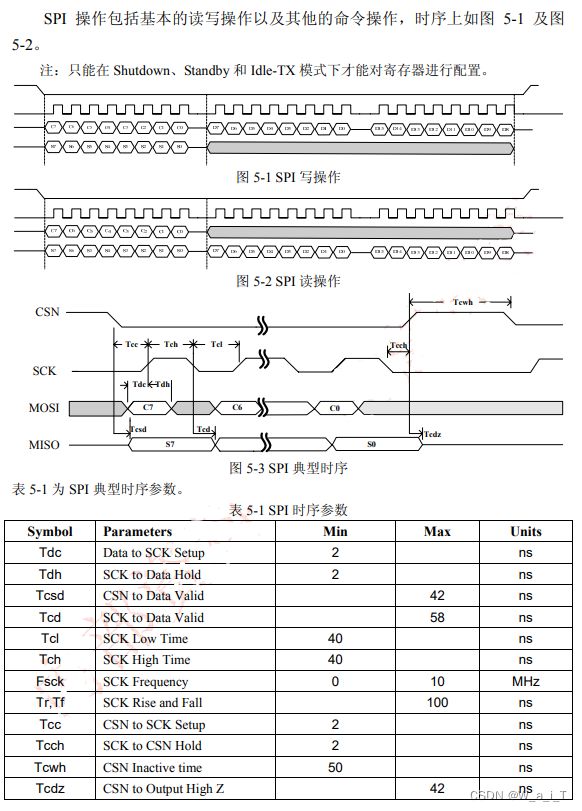
SPI 命令
SPI 命令参见表 6-1。CSN 从高电平翻转为低电平,SPI 接口开始工作。每 一次 SPI 操作,MISO 输出的第一字节为状态寄存器的值,之后通过命令来确定 是否输出值(不输出为高阻态)。命令格式中命令字按从 MSBit 到 LSBit 的顺序输
入,数据格式中按从 LSByte 到 MSByte 的顺序,每字节中按从 MSBit 到 LSBit 的顺序输入。
SPI 命令
根据上述的状态机图我们可以写出我们的驱动代码,如下
NRF24L01.H代码如下(示例):(在这里,我们就不讲解关于SPI协议的代码,对于SPI协议不太了解的话,可以看我的其他博客)
#ifndef __NRF24L01_H__
#define __NRF24L01_H__
#include 5、应用编程
那么,在本次项目中呢我们是要用到一对多发送,
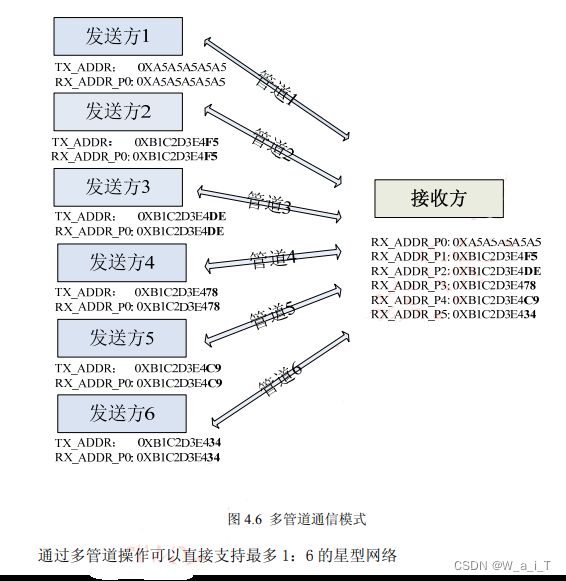
多管道通信
收发器可同时进行 6 个发送端,1 个接收端之的双向或单向通信。此时,接收端要在EN_RXADDR
寄存器中使能各个管道,并设置每一个接收管道地址与对应的发送端发送地址相同.其中接收管道 0 有单独的 5 字节地址,管道 1-5 共用高4 字节有效地址。 接收端如果需要接收 ACK 信号,还需要设置接收管道 0 地址与自身发送地 址相同.
在本次开发中呢,由于传输的数据较少,数据没有占满整个通道,我们采用的方法是用通道中的某一位作为标志位,如下
主机判断接受的标志位
/*USER*/
#define ID_TX_1 0XAA
#define ID_TX_2 0XBB
#define ID_TX_3 0XCC
..............//其余部分省略
..............//在接收之后进行判断
if(RxBuf[5]==ID_TX_1)OLED_ShowNum(48,5,1,1,8);//是从机1发送过来的消息
else if(RxBuf[5]==ID_TX_2)OLED_ShowNum(48,5,2,1,8);//是从机2发送过来的消息
else if(RxBuf[5]==ID_TX_3)OLED_ShowNum(48,5,3,1,8);//是从机3发送过来的消息
从机发送标志位
/*USER*/
#define ID_TX_1 0XAA
..............//其余部分省略
..............//在发送前进行赋值
TxBuf[5]=ID_TX_1;
使用总结
1.问题描述
在本次开发的过程中,遇到了一个比较玄学的问题——本来设计好了一对主从通讯,再过了几天之后,有一个电路板上的2.4g突然不能够正常工作,我检查了一点电路,没有断点,
但是我把它拔下来,在我的测试板上重新测试的时候发现它是正常的
当时比较着急,然后就直接在这几个一主多从电路板之间,把他们的2.4g相互替换了一下,居然又可以正常工作了!!!每日玄学又有了新素材
2.原因分析
现在回想起来,可能是当时用电脑的外设太多,导致拓展坞提供的电源功率不够,不能够使得模块正常工作。
***提示:这里对文章进行最后总结:***