使用STM32F103 I2C驱动SHT30
使用STM32F103 I2C驱动SHT30
SHT30的官方代码见《Sensirion_Humidity_Sensors_SHT3x_Sample_Code_V2》,不过官方是用GPIO模拟的I2C时序,现在修改为STM32F103的硬件I2C驱动SHT30.
使用STM32F103的I2C1实现该功能,相关头文件定义如下:
#define SHT30_I2C I2C1
#define SHT30_I2C_ADDR (0x44)
#define SHT30_I2C_SCL_PIN (GPIO_Pin_6) /* PB.06 */
#define SHT30_I2C_SCL_GPIO_PORT (GPIOB)
#define SHT30_I2C_SDA_PIN (GPIO_Pin_7) /* PB.07 */
#define SHT30_I2C_SDA_GPIO_PORT (GPIOB)
#define I2C_SPEED 100000U
官方代码在while(1)里调用SHT3X_GetTempAndHumi函数获取温湿度值(时钟延伸模式):
//-----------------------------------------------------------------------------
while(1)
{
SHT3X_GetTempAndHumi(&temperature, &humidity, REPEATAB_HIGH, MODE_CLKSTRETCH, 50);
printf("temperature=%.1f℃\thumidity=%.1f%%RH\terror=%d\r\n",(float)temperature,(float)humidity,(u8)error);
}
根据产品实际需求,在需要获取温湿度时调用SHT3X_GetTempAndHumi()函数即可。
//-----------------------------------------------------------------------------
1:获取温湿度函数SHT3X_GetTempAndHumi()
etError SHT3X_GetTempAndHumi(ft* temperature, ft* humidity,etRepeatability repeatability, etMode mode, u8t timeout)
{
etError error;
switch(mode)
{
case MODE_CLKSTRETCH: // get temperature with clock stretching mode
error = SHT3X_GetTempAndHumiClkStretch(temperature, humidity,repeatability, timeout);
break;
case MODE_POLLING: // get temperature with polling mode
error = SHT3X_GetTempAndHumiPolling(temperature, humidity,repeatability, timeout);
break;
default:
error = PARM_ERROR;
break;
}
return error;
}
由于我们使用的是MODE_CLKSTRETCH时钟延伸模式,因此只修改SHT3X_GetTempAndHumiClkStretch函数。
2:用时钟延伸模式获取温湿度函数SHT3X_GetTempAndHumiClkStretch();
//-----------------------------------------------------------------------------
etError SHT3X_GetTempAndHumiClkStretch(ft* temperature, ft* humidity,etRepeatability repeatability, u8t timeout)
{
etError error; // error code
u16t rawValueTemp; // temperature raw value from sensor
u16t rawValueHumi; // humidity raw value from sensor
error = SHT3X_StartWriteAccess();
// if no error ...
if(error == NO_ERROR)
{
// start measurement in clock stretching mode
// use depending on the required repeatability, the corresponding command
switch(repeatability)
{
case REPEATAB_LOW:
error = SHT3X_WriteCommand(CMD_MEAS_CLOCKSTR_L);
break;
case REPEATAB_MEDIUM:
error = SHT3X_WriteCommand(CMD_MEAS_CLOCKSTR_M);
break;
case REPEATAB_HIGH:
error = SHT3X_WriteCommand(CMD_MEAS_CLOCKSTR_H);
break;
default:
error = PARM_ERROR;
break;
}
}
// if no error, start read access
if(error == NO_ERROR) error = SHT3X_StartReadAccess();
// if no error, read temperature raw values
if(error == NO_ERROR) error = SHT3X_Read2BytesAndCrc(&rawValueTemp, ACK, timeout);
// if no error, read humidity raw values
if(error == NO_ERROR) error = SHT3X_Read2BytesAndCrc(&rawValueHumi, NACK, 0);
//SHT3X_StopAccess();
// if no error, calculate temperature in °C and humidity in %RH
if(error == NO_ERROR)
{
*temperature = SHT3X_CalcTemperature(rawValueTemp);
*humidity = SHT3X_CalcHumidity(rawValueHumi);
}
else
{
SHT3X_StopAccess();
}
return error;
}
与官方源代码相比,修改了函数SHT3X_StopAccess()的定义及使用方式。官方源代码在接收到6个字节的温湿度数据后,调用SHT3X_StopAccess()模拟产生I2C通信停止条件。而硬件I2C(主接收模式)关闭通信则需要以下操作(RM0008中文参考手册P499):
主设备在从 从设备 接收到最后一个字节后发送一个NACK。接收到NACK后,从设备释放对SCL和SDA线的控制;主设备就可以发送一个停止/重起始条件.
1:为了在收到最后一个字节后产生NACK脉冲,在读倒数第二个字节之后必须清除ACK位.
2:为了产生一个停止/重起始条件,软件必须在读第二个数据字节之后设置STOP/START位.
主接收器传送序列图:

因此,应在接收最后一个字节之前添加通信停止代码,该代码会在I2c_ReadByte()函数里描述。
3:开始写入访问函数SHT3X_StartWriteAccess()。该函数先判断总线是否busy,不忙的话产生开始条件,再发送从机地址,然后等待从机应答。
//-----------------------------------------------------------------------------
static etError SHT3X_StartWriteAccess(void)
{
etError error = NO_ERROR; // error code
/*!< While the bus is busy */
SHT30_Timeout = SHT30_LONG_TIMEOUT;
while(I2C_GetFlagStatus(SHT30_I2C, I2C_FLAG_BUSY))
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_ERROR;
return error;
}
}
I2C_AcknowledgeConfig(SHT30_I2C, ENABLE);
//I2c_StartCondition();
// write a start condition
I2C_GenerateSTART(SHT30_I2C, ENABLE);
/*!< Test on EV5 and clear it (cleared by reading SR1 then writing to DR) */
/**
* @brief Communication start
*
* After sending the START condition (I2C_GenerateSTART() function) the master
* has to wait for this event. It means that the Start condition has been correctly
* released on the I2C bus (the bus is free, no other devices is communicating).
*
*/
SHT30_Timeout = SHT30_FLAG_TIMEOUT;
while(!I2C_CheckEvent(SHT30_I2C, I2C_EVENT_MASTER_MODE_SELECT))
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_EV5_ERROR;
return error;
}
}
// write the sensor I2C address with the write flag
//error = I2c_WriteByte(_i2cAddress << 1);
//发送地址后,等待从机确认 EV6
I2C_Send7bitAddress(SHT30_I2C, (SHT30_I2C_ADDR << 1), I2C_Direction_Transmitter);
/*!< Test on EV6 and clear it */
SHT30_Timeout = SHT30_LONG_TIMEOUT;
while(!I2C_CheckEvent(SHT30_I2C, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED))
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_EV6_ERROR;
return error;
}
}
return error;
}
//-----------------------------------------------------------------------------
4:写命令函数SHT3X_WriteCommand()
从机应答主机地址后,SHT3X_WriteCommand()函数开始写命令,先发送高字节,再发生低字节。每个字节发送后均要等待从机应答。发送完成后,主机产生停止信号。
//-----------------------------------------------------------------------------
static etError SHT3X_WriteCommand(etCommands command)
{
etError error = NO_ERROR; // error code
// write the upper 8 bits of the command to the sensor
//error = I2c_WriteByte(command >> 8);
I2C_SendData(SHT30_I2C,command >> 8);
/* --EV8 */
SHT30_Timeout = SHT30_FLAG_TIMEOUT;
while(!I2C_CheckEvent(SHT30_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_EV8_ERROR;
return error;
}
}
// write the lower 8 bits of the command to the sensor
//error |= I2c_WriteByte(command & 0x00FF);
I2C_SendData(SHT30_I2C,command & 0x00FF);
SHT30_Timeout = SHT30_FLAG_TIMEOUT;
while(!I2C_CheckEvent(SHT30_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTED))//EV8_2
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_EV8_ERROR;
return error;
}
}
I2C_GenerateSTOP(SHT30_I2C, ENABLE);//主发送器通信完成
return error;
}
5:开始读访问SHT3X_StartReadAccess()
//-----------------------------------------------------------------------------
static etError SHT3X_StartReadAccess(void)
{
etError error; // error code
// write a start condition
//I2c_StartCondition();
/*!< While the bus is busy */
SHT30_Timeout = SHT30_LONG_TIMEOUT;
while(I2C_GetFlagStatus(SHT30_I2C, I2C_FLAG_BUSY))
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_ERROR;
return error;
}
}
// write a start condition
//I2c_StartCondition();
//EV5:After sending the START condition (I2C_GenerateSTART() function) the master
//has to wait for this event.
I2C_GenerateSTART(SHT30_I2C, ENABLE);
/*!< Test on EV5 and clear it (cleared by reading SR1 then writing to DR) */
SHT30_Timeout = SHT30_FLAG_TIMEOUT;
while(!I2C_CheckEvent(SHT30_I2C, I2C_EVENT_MASTER_MODE_SELECT))
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_EV5_ERROR;
return error;
}
}
// write the sensor I2C address with the write flag
//error = I2c_WriteByte(_i2cAddress << 1);
//发送地址后,等待从机确认 EV6
I2C_Send7bitAddress(SHT30_I2C, (SHT30_I2C_ADDR << 1), I2C_Direction_Receiver);
/*!< Test on EV6 and clear it */
SHT30_Timeout = SHT30_FLAG_TIMEOUT;
while(!I2C_CheckEvent(SHT30_I2C, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED))
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_EV6_ERROR;
return error;
}
}
// write the sensor I2C address with the read flag
//error = I2c_WriteByte(_i2cAddress << 1 | 0x01);
return error;
}
6:读取两个字节数据和Crc:SHT3X_Read2BytesAndCrc()和官方代码一样。
//-----------------------------------------------------------------------------
static etError SHT3X_Read2BytesAndCrc(u16t* data, etI2cAck finaleAckNack,u8t timeout)
{
etError error; // error code
u8t bytes[2]; // read data array
u8t checksum; // checksum byte
// read two data bytes and one checksum byte
error = I2c_ReadByte(&bytes[0], ACK, timeout);
if(error == NO_ERROR) error = I2c_ReadByte(&bytes[1], ACK, 0);
if(error == NO_ERROR) error = I2c_ReadByte(&checksum, finaleAckNack, 0);
// verify checksum
if(error == NO_ERROR) error = SHT3X_CheckCrc(bytes, 2, checksum);
// combine the two bytes to a 16-bit value
*data = (bytes[0] << 8) | bytes[1];
return error;
}
7:读去字节I2c_ReadByte()
为了防止读取数据时,任务被中断打断导致数据出错,读取时先关闭中断,读取完成后,再开启中断。
etError I2c_ReadByte(u8t *rxByte, etI2cAck ack, u8t timeout)
{
etError error = NO_ERROR;
__set_PRIMASK(1);//关总中断
if(ack == ACK)
{
I2C_AcknowledgeConfig(SHT30_I2C, ENABLE);
}
else
{
//关闭通信:
/* 主设备在从 从设备 接收到最后一个字节后发送一个NACK。接收到NACK后,从设备
* 释放对SCL和SDA线的控制;主设备就可以发送一个停止/重起始条件.
* 1:为了在收到最后一个字节后产生NACK脉冲,在读倒数第二个字节之后必须清除ACK位.
* 2:为了产生一个停止/重起始条件,软件必须在读第二个数据字节之后设置STOP/START位.
*/
I2C_AcknowledgeConfig(SHT30_I2C, DISABLE);
(void)SHT30_I2C->SR2;
I2C_GenerateSTOP(SHT30_I2C, ENABLE);
}
//从机端接收到主机地址后,开始向主机发送数据
/*!< Test on EV7 */
SHT30_Timeout = SHT30_LONG_TIMEOUT;
while(!I2C_CheckEvent(SHT30_I2C, I2C_EVENT_MASTER_BYTE_RECEIVED))
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_EV7_ERROR;
return error;
}
}
*rxByte = I2C_ReceiveData(SHT30_I2C);
if(ack == NACK)
{
/* Wait to make sure that STOP control bit has been cleared */
//STOP位:监测到停止条件时,由硬件清除。
SHT30_Timeout = SHT30_FLAG_TIMEOUT;
while(SHT30_I2C->CR1 & I2C_CR1_STOP)
{
if((SHT30_Timeout--) == 0)
{
error = TIMEOUT_ERROR;
return error;
}
}
}
__set_PRIMASK(0);//开总中断
return error; //return with no error
}
8:SHT3X_CheckCrc()和官方代码一样。
//-----------------------------------------------------------------------------
static etError SHT3X_CheckCrc(u8t data[], u8t nbrOfBytes, u8t checksum)
{
u8t crc; // calculated checksum
// calculates 8-Bit checksum
crc = SHT3X_CalcCrc(data, nbrOfBytes);
// verify checksum
if(crc != checksum) return CHECKSUM_ERROR;
else return NO_ERROR;
}
9:SHT3X_StopAccess()
修改了SHT3X_StopAccess函数的内容及使用方式,当检测到有ERROR时,调用该函数,重新初始化I2C。
static void SHT3X_StopAccess(void)
{
I2C_DeInit(SHT30_I2C);
SHT30_Init(SHT30_I2C_ADDR);
}
10: I2C配置:SHT30_Init()
void SHT30_Init(uint8_t i2cAddress)
{
I2C_InitTypeDef I2C_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/*配置时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Pin = SHT30_I2C_SCL_PIN|SHT30_I2C_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(SHT30_I2C_SCL_GPIO_PORT, &GPIO_InitStructure);
/*!< SHT30_I2C Periph clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
I2C_DeInit(I2C1);
/*!< I2C configuration */
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = i2cAddress;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = I2C_SPEED;
/* Apply I2C configuration after enabling it */
I2C_Init(I2C1, &I2C_InitStructure);
/* I2C Peripheral Enable */
I2C_Cmd(I2C1, ENABLE);
}
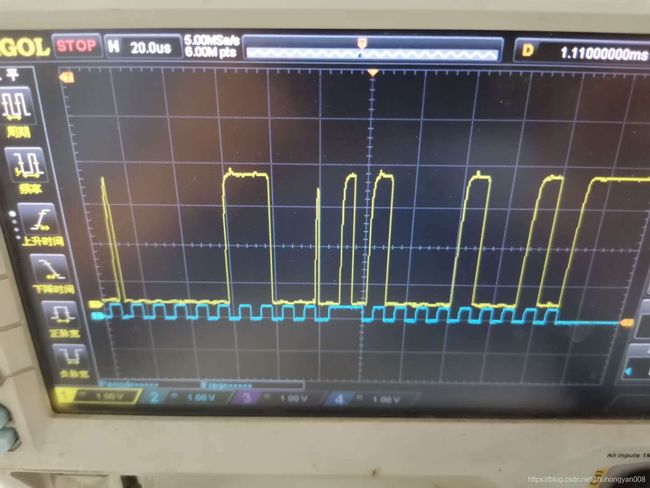
起始条件+地址+写命令+命令码高字节:

命令码低字节+停止条件+起始条件+地址+读命令+时钟延伸(等待转换结果):
获取的温湿度值:
![]()