ZED双目相机标定跑通vins fusion
一、环境
1.所需工具依赖及环境
ubuntu18.04
ros1
code_utils
imu_utils
Kalibr
zed-ros-wrapper
vins fusion(能够运行)
2.相机
ZED 2
链接: ZED 2

二、相机标定
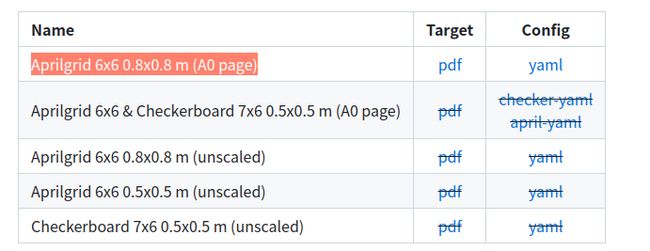
1.标定板准备
链接: 标定板
-
下载Aprilgrid 6x6 0.8x0.8 m (A0 page)两个文件
-
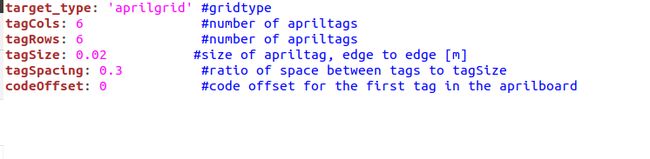
用A4纸打印pdf文件,量好大正方形和小正方形的尺寸,我这里量的尺寸是2cm和0.6cm
-
修改yaml文件,tagSize是大正方形尺寸,tagSpacing是小正方形/大正方形尺寸(单位是m)
-
用zed 2相机采集ros包,可参考下面的视频
https://www.youtube.com/watch?app=desktop&v=puNXsnrYWTY
(1)俯仰角摆动3次
(2)偏航角摆动3次
(3)翻滚角摆动3次
(4)上下移动3次
(5)左右移动3次
(6)前后移动3次
(7)自由移动,摆动幅度大一些,但要移动缓慢些,使得标定目标尽可能出现在相机的所有视野范围内
整体标定时间在90s以上
具体步骤如下 -
链接zed 2相机
-
打开zed-ros-wrapper文件,根据自己需求修改文件夹及频率
source devel/setup.bash
roslaunch zed_wrapper zed2.launch
#显示图像
rosrun image_view image_view image:=/zed2/zed_node/left/image_rect_color
rosrun image_view image_view image:=/zed2/zed_node/right/image_rect_color
##限制发布频率
rosrun topic_tools throttle messages /zed2/zed_node/imu/data_raw 200 /zed2/zed_node/imu/data_raw2
rosrun topic_tools throttle messages /zed2/zed_node/left/image_rect_color 20 /zed2/zed_node/left/image_rect_color2
rosrun topic_tools throttle messages /zed2/zed_node/right/image_rect_color 20 /zed2/zed_node/right/image_rect_color2
##开始录制
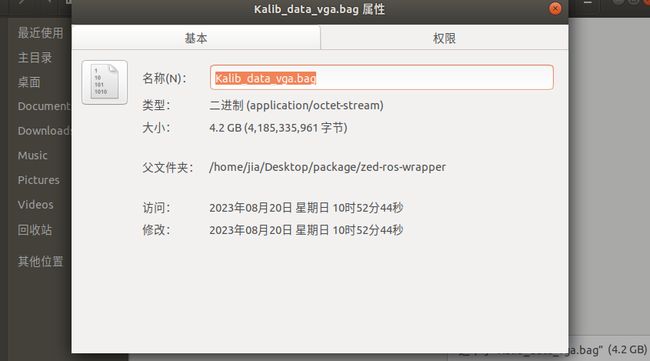
rosbag record -O Kalib_data_vga.bag /zed2/zed_node/imu/data_raw2 /zed2/zed_node/left/image_rect_color2 /zed2/zed_node/right/image_rect_color2
ctrl+c终止录制,在当前目录下可以看到自己的录制bag包
- 将两个文件单独放置一个文件夹(我这里放置在了kalibr的文件夹下)
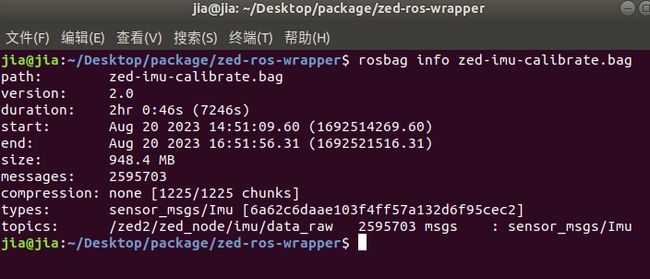
通过命令rosbag info+包名可以查看bag的相关属性,我这里最后把bag文件修改名称zed.bag

- 利用kalibr运行标定命令(修改自己的目录)
# 相机标定
source /home/jia/Desktop/package/kalibr_workspace/devel/setup.bash
#双目
rosrun kalibr kalibr_calibrate_cameras --bag /home/jia/Desktop/package/kalibr_workspace/zed/zed.bag --topics /zed2/zed_node/left/image_rect_color2 /zed2/zed_node/right/image_rect_color2 --models pinhole-radtan pinhole-radtan --target /home/jia/Desktop/package/kalibr_workspace/zed/april_6x6_80x80cm.yaml --bag-from-to 5 150 --show-extraction --approx-sync 0.04
-
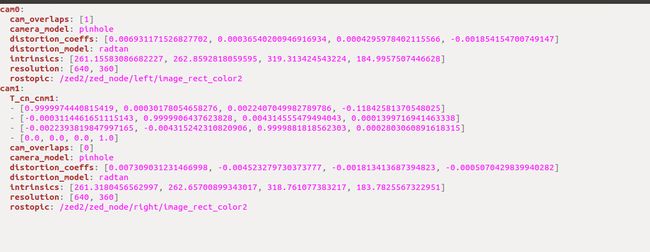
一段时间等待后,出现三个文件,标定结束

-
可以查看一下生成的txt文件中的reprojection error(重投影误差)是多少,理想范围是0.1-0.2

-
生成的yaml文件就是两个相机的内参及两个相机之间的变换矩阵
三、IMU标定
## 数据采集
source devel/setup.bash
roslaunch zed_wrapper zed2.launch
## 单独录制imu
rosbag record -O zed-imu-calibrate.bag /zed2/zed_node/imu/data_raw
- 静止zed相机,采集数据,一般为2h左右
- 编写一个launch文件,启动标定工具。根据自己情况进行修改
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<!-- 数据集的话题 -->
<param name="imu_topic" type="string" value= "/zed2/zed_node/imu/data_raw"/>
<!-- IMU的名字,后面生成的标定文件会附带这个名字作为标记 -->
<param name="imu_name" type="string" value= "zed_imu"/>
<!-- 标定结果输出路径 -->
<param name="data_save_path" type="string" value= "/home/jia/Desktop/package/imu_utils/zed_imu/result"/>
<!-- 数据集的长度,单位:分钟 -->
<param name="max_time_min" type="int" value= "120"/>
<!-- Allan方差的cluster,一般设置100即可 -->
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>
- 将该文件放置imu_utils的launch文件夹下

- 运行命令:
source devel/setup.bash
roslaunch imu_utils zed_imu.launch
# 新打开一个终端 播放imu
rosbag play -r 200 /home/jia/Desktop/package/imu_utils/zed_imu/zed-imu-calibrate.bag
- 最终得到的标定文件如图所示:

四、Camera-IMU标定
准备好之前的相机标定的yaml文件

准备好imu的标定文件,将数据中的avg-axis数据按下面的格式写入(注意Acc与Gyr的顺序与imu的话题)
#Accelerometers
accelerometer_noise_density: 1.9033710113349051e-02 #Noise density (continuous-time)
accelerometer_random_walk: 5.5854263338777580e-04 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 1.6947414041138789e-03 #Noise density (continuous-time)
gyroscope_random_walk: 3.9106036886980679e-06 #Bias random walk
rostopic: /zed2/zed_node/imu/data_raw2 #the IMU ROS topic
update_rate: 200.0 #Hz (for discretization of the values above)
准备好之前的april_6x6_A4.yaml

准备好之前双目标定的bag文件
运行(根据自己目录修改)
source /home/jia/Desktop/package/kalibr_workspace/devel/setup.bash
# imu+双目
rosrun kalibr kalibr_calibrate_imu_camera --bag /home/jia/Desktop/package/kalibr_workspace/imu_zed/zed.bag --target /home/jia/Desktop/package/kalibr_workspace/imu_zed/april_6x6_80x80cm.yaml --cam /home/jia/Desktop/package/kalibr_workspace/imu_zed/zed-camchain.yaml --imu /home/jia/Desktop/package/kalibr_workspace/imu_zed/resultzed_imu_imu_param.yaml
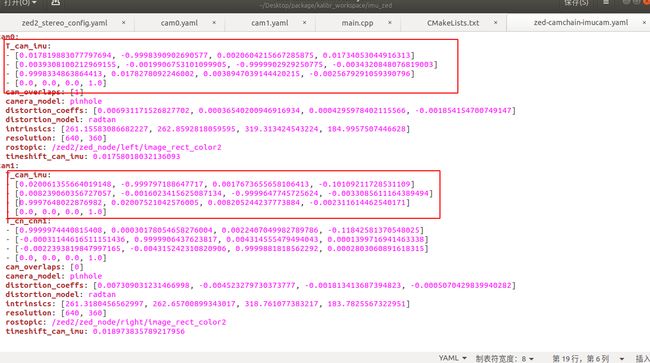
运行完成后得到结果如下:

- 一般情况两个相机的数值都在0.15以下说明标定结果良好,这里稍微大点,看看后面vins fusion轨迹会不会飘

五、vins fusion文件修改
左相机配置文件cam0.yaml
这里我订阅的是畸变纠正后的话题,所以这里上面设置为0
%YAML:1.0
---
model_type: PINHOLE
camera_name: camera
image_width: 640
image_height: 360
distortion_parameters:
k1: 0
k2: 0
p1: 0
p2: 0
projection_parameters:
fx: 261.15583086682227
fy: 262.8592818059595
cx: 319.313424543224
cy: 184.9957507446628
右相机配置文件cam1.yaml
%YAML:1.0
---
model_type: PINHOLE
camera_name: camera
image_width: 640
image_height: 360
distortion_parameters:
k1: 0
k2: 0
p1: 0
p2: 0
projection_parameters:
fx: 261.3180456562997
fy: 262.65700899343017
cx: 318.761077383217
cy: 183.7825567322951
新建zed配置文件zed2_stereo_config.yaml
注意:这里配置文件中的body_T_cam0: !!opencv-matrix和body_T_cam1: !!opencv-matrix是相机到IMU的变换矩阵,而我们的标定结果是IMU到相机的变换矩阵,所以需要取逆
对两个矩阵求逆
这里给出一个求逆的简单代码:
main.cpp
#include camkelists.txt
cmake_minimum_required(VERSION 3.12)
project(MatrixInverseExample)
set(CMAKE_CXX_STANDARD 11)
# 查找Eigen库
find_package(Eigen3 REQUIRED)
# 添加可执行文件
add_executable(matrix_inverse main.cpp)
# 链接Eigen库
target_link_libraries(matrix_inverse Eigen3::Eigen)
最终结果:
%YAML:1.0
#common parameters
#support: 1 imu 1 cam; 1 imu 2 cam: 2 cam;
imu: 1
num_of_cam: 2
#实时相机
imu_topic: "/zed2/zed_node/imu/data_raw"
image0_topic: "/zed2/zed_node/left/image_rect_gray"
image1_topic: "/zed2/zed_node/right/image_rect_gray"
# 录制bag包
#imu_topic: "/zed2/zed_node/imu/data_raw2"
#image0_topic: "/zed2/zed_node/left/image_rect_color2"
#image1_topic: "/zed2/zed_node/right/image_rect_color2"
output_path: "~"
cam0_calib: "cam0.yaml"
cam1_calib: "cam1.yaml"
image_width: 640
image_height: 360
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 0 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
# 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess.
body_T_cam0: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [0.0178199, 0.00393081, 0.999833, 0.00227199,
-0.999839, -0.00199068, 0.0178278, 0.0173767,
0.00206042, -0.99999, 0.0038947, -0.00345778,
0, 0, 0, 1]
body_T_cam1: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [0.0200614, 0.00823906, 0.999765, 0.00436638,
-0.999797, -0.00160234, 0.0200752, -0.101031,
0.00176737, -0.999965, 0.00820524, -0.00311081,
0, 0, 0, 1]
#Multiple thread support
multiple_thread: 0
#feature traker paprameters
max_cnt: 150 # max feature number in feature tracking
min_dist: 30 # min distance between two features
freq: 10 # frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image
F_threshold: 1.0 # ransac threshold (pixel)
show_track: 1 # publish tracking image as topic
flow_back: 1 # perform forward and backward optical flow to improve feature tracking accuracy
#optimization parameters
max_solver_time: 0.04 # max solver itration time (ms), to guarantee real time
max_num_iterations: 8 # max solver itrations, to guarantee real time
keyframe_parallax: 10.0 # keyframe selection threshold (pixel)
#imu parameters The more accurate parameters you provide, the better performance
acc_n: 0.1 # accelerometer measurement noise standard deviation.
gyr_n: 0.01 # gyroscope measurement noise standard deviation.
acc_w: 0.001 # accelerometer bias random work noise standard deviation.
gyr_w: 0.0001 # gyroscope bias random work noise standard deviation.
g_norm: 9.81007 # gravity magnitude
#unsynchronization parameters
estimate_td: 0 # online estimate time offset between camera and imu
td: 0.0 # initial value of time offset. unit: s. readed image clock + td = real image clock (IMU clock)
#loop closure parameters
load_previous_pose_graph: 0 # load and reuse previous pose graph; load from 'pose_graph_save_path'
pose_graph_save_path: "~/output/pose_graph/" # save and load path
save_image: 1 # save image in pose graph for visualization prupose; you can close this function by setting 0
运行vins fusion (根据自己文件修改)
./run.sh
# run.sh文件
#!/bin/bash
# Start RViz
gnome-terminal -- bash -c "source devel/setup.bash && roslaunch vins vins_rviz.launch"
# Start VINS-Fusion node
sleep 5
gnome-terminal -- bash -c "source devel/setup.bash && rosrun vins vins_node src/config/zed/zed2_stereo_config.yaml"
# Play rosbag
sleep 5
# gnome-terminal -- bash -c "source devel/setup.bash && rosbag play /home/jia/Desktop/data/EuRoc/MH_01_easy.bag"
#回环检测
sleep 5
gnome-terminal -- bash -c "source devel/setup.bash && rosrun loop_fusion loop_fusion_node src/config/zed/zed2_stereo_config.yaml"
## 实时相机
gnome-terminal -- bash -c "source devel/setup.bash && source /home/jia/Desktop/package/zed-ros-wrapper/devel/setup.bash && roslaunch zed_wrapper zed2.launch"
# Keep the terminal open until you manually close it
echo "Press Enter to close the terminals"
read
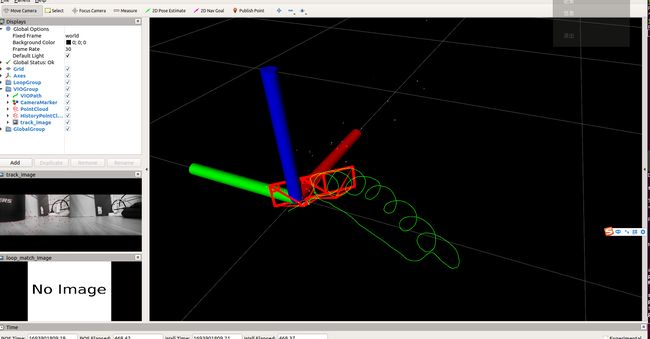
运行结果