机器人电机驱动及智能控制分析及展望
无刷电机成为主流的趋势
无论是从生活中见到的电机,还是从各大机器人讲座中,我们都不难发现,无刷电机越来越成为大势所趋。在机器人关节的电机上,由于力矩反馈和柔顺控制的需要,直流无刷电机具有交流永磁同步无可比拟的优势。而在生活中常见的产品中,比如风扇、吹风机、筋膜抢等,无刷电机在使用寿命、维护周期、成本和性能等各个方面均远超有刷电机,也正在逐步替代有刷电机的应用场景。然而,无刷电机的性能可以做得十分极致,但在驱动和控制上却往往会受到限制。因此,本文将基于无刷电机的驱动和控制,深入探讨无刷电机驱动算法的未来发展,以及未来电机行业的就业、创业机会。
遏制大功率电机驱动器发展的因素探讨
由于三相电机需要交流驱动,因此需要通过下图所示的逆变电路将直流电转换为交流电,而这里最为关键的因素就是换向所用到的开关。在传统变频器中,往往会采用IGBT驱动器作为电子变频的开关器件,而在直流小电压的情况下,则一般采用场效应管来作为开关器件。

驱动器发热影响性能
如果应用在机器人领域中,为了给电机提供较大力矩,场效应管则需要承受比较大电流。如果电机受到外力作用而朝着与驱动方向相反的方向转动,则导致了较大的回流电流产生。此时,如果要保证恒力控制,则需要向电机通入更大的电流,这就意味着场效应管需要承受的电流更大。那么我们可以做个简单计算,假设场效应管的导通电阻为4.5mΩ,漏源极流过的电流为
I d = 50 A I_d = 50A Id=50A
那么,此时场效应管在5秒内产生的热量为
Q = I 2 R t = 5 0 2 × 4.5 × 0.001 × 5 = 56.25 J Q = I^2Rt = 50^2 \times 4.5 \times 0.001 \times 5 = 56.25 J Q=I2Rt=502×4.5×0.001×5=56.25J
可想而知,大电流工况下的场效应管发热会及其严重。同样的道理,对于电机来说,电流的不断变化会使得电机电感产生自感电动势,同样会对电流产生影响,电机内阻的发热也是不容忽视的一部分。因此,无刷电机驱动首先面临的一个问题就是散热。
场效应管过流损坏或过压击穿
其次,由于反向电流和堵转电流的存在,使得对场效应管的性能要求增加。如果在高速工况下,则需要有低导通时间的场效应管,来保证换向的频率。而如果在大负载工况下,则需要保证不会因为电流过大而损坏,因此,场效应管的性能和成本也成为了驱动器设计中必须考虑的因素。
此外,在场效应管因发热升温的同时,最大允许的导通电流也会降低,进一步增加了击穿的风险。根据目前的晶体管制造技术和市面上场效应管的售价来看,最大可承受电压和最大导通电流直接影响了场效应管的成本,如果将电流做到300A以上,并综合考虑发热等因素,则6个场效应管的成本完全不会低于80元人民币。实际上,电机在被方向驱动的时候,保持恒定力矩所需要的电流可以达到实际电机电流的7倍,也就是原本50A能够驱动的电流,由于负载过大,场效应管中需要承受可以达到350A以上的电流,成本可想而知。
无刷电机驱动的难点
场效应管栅极和源极之间的电压决定了它的开通和关闭,也就是需要满足条件
$$ V G S > V V_{GS}>V VGS>V 在桥式逆变电路中,对于上图中的 V T 1 来说, S 极电压即为 a 点电压,那么就要求 G 极电压需要超过 a 点电压和导通电压之和才能使 M O S 管导通,即 在桥式逆变电路中,对于上图中的VT1来说,S极电压即为a点电压,那么就要求G极电压需要超过a点电压和导通电压之和才能使MOS管导通,即 在桥式逆变电路中,对于上图中的VT1来说,S极电压即为a点电压,那么就要求G极电压需要超过a点电压和导通电压之和才能使MOS管导通,即 V G S V_{GS} VGS$$需要大于a点电压和导通电压之和。
在驱动上桥臂方面,常常采用自举电路的方式来解决上述问题,如下图所示

该图为国产桥式换向电路驱动器EG2312中的示意图,采用自举悬浮驱动电源结构大大简化了驱动电源设计,只用一路电源电压VCC即可完成高端 N沟道 MOS 管和低端 N沟道 MOS 管两个功率开关器件的驱动,给实际应用带来极大的方便。
在屹晶微电子官方给的电路中,使用外接一个自举二极管和一个自举电容自动完成自举升压功能,假定在下管开通、上管关断期间自举电容已充到足够的电压,当HO引脚输出高电平时上管开通、下管关断时,自举电容VC上的电压将等效一个电压源作为内部驱动器VB和VS的电源,完成高端 N沟道 MOS 管的驱动。
关节电机技术应用
关节电机在协作机器人中的应用
协作机器人的发展
根据新松机器人的讲座和《2022 年中国协作机器人技术发展报告》,本文总结了写作机器人发展三个方面的内容,如下:
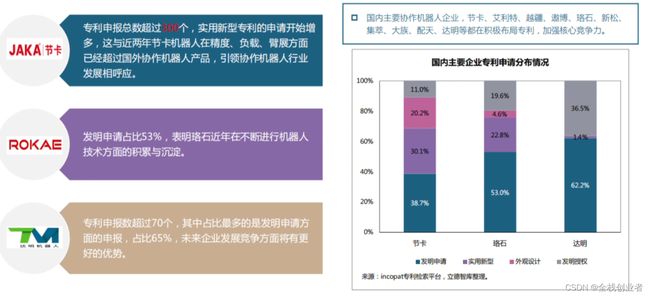
- 协作机器人专利技术创新迎来更大突破
多位专家围绕全球协作机器人专利与标准,对全球协作机器人专利申请情况、国内竭塔机器人等重点企业专利布局进行对照和分析,针对国内协作机器人标准认证体系展开解读,探讨中国协作机器人企业全球化的未来可能性。
- 协作机器人认证体系逐步完善
部分企业领跑 MTDF 认证作为衡量机器人质量和可靠性的重要参考依据,目前在军工、航空等行业已得到广泛认可。以节卡机器人获得的 NTBM 和 SEMI 认证为例,致力于提升产品质量的同时保证协作机器人使用的安全性。
- 协作机器人前沿发展趋势
前沿发展趋势一,智能感知多学科交叉融合感知作为协作机器人与人环境、机器人之间进行交互的基础,除了多传感信息融合之外,协作机器人越发呈现出与多学科深度交叉融合的态势。《2022 年中国协作机器人技术发展报告》预测未来的研究方向为主动感知与自然交互理论及方法,更多传感器的加入使协作机器人能够理解人类指令。
前沿发展趋势二,自主认知复杂环境灵巧作业高度智能是对新一代协作机器人的重大共性技术需求。当前协作机器人应用面越来越广,在复杂作业能力、自适应可重构的装配能力、对非结构化环境的感知能力以及与人协作能力方面需要更加智能化。在《2022 年中国协作机器人技术发展报告》中,专家们预测,未来协作机器人的研究方向为复杂环境的自主认知。
前沿发展趋势三,人机交互机器人操作智能化随着人机交互等技术的快速发展,人们对协作机器人可用性与易用性的要求越来越高。基于手势理解的人机交互将会成为协作机器人交互的热门研究方向之一,人机交互技术也将在这几年内得到长足的发展和进步。
前沿发展趋势四,碰撞检测自适应柔顺控制技术将进一步发展。碰撞检测一般分为基于传感器的碰撞检测和基于无传感器的碰撞检测,《2022 年中国协作机器人技术发展报告》分别针对两种不同的碰撞检测展开了深入分析。随着制造业的转型升级,协作机器人凭借着自身的诸多优势,在未来或可成为智能制造发展的关键。
电机驱动技术在协作机器人发展中的具体体现
协作机器人前言发展中的一个重要技术是柔顺控制技术,柔顺控制技术分为主动柔顺和被动柔顺,而主动柔顺控制技术的关键便在于电机的控制。从中科新松的讲座中可以得知,未来电机无传感器技术将必然取代有传感器的技术,但目前基于无传感器的电机控制技术还比较不成熟,并且在低速情况下应用困难,因此目前多将传感器作为无传感器技术的辅助方案。
无传感器技术的实现方法,是通过对电机三个相进行电流采样实现的。由于驱动电机时,只需要在其中的两个相中通上电流,第三个相便可用于反向电动势的测量。因此,通过采样第三个相的电流,即可计算得出无刷电机的转子位置。但是,这种方法在于电机低速旋转是较难实现,原因是,低速旋转式产生的感应电动势较低,即使通过运算放大器将其放大200倍,都很难避免误差的影响。
在柔顺控制方面,人工神经网络已经逐步得到应用。神经网络具有自适应性和自学习性的特点,适用于机械臂柔顺控制的研究,与传统控制方法相比具有很大的优越性。这方面的研究大体可分为两类:一类是假定机械臂动力学模型完全未知,神经网络通过学习来逼近系统的动力学或逆动力学模型,以实现反馈控制或逆动力学控制;另一类是假定机械臂动力学模型为部分已知的,神经网络被用来学习模型中的未知参数,以减少在线计算的负担。
综上所述,目前无刷电机传感技术,基本能够实现无传感器的柔顺控制,但为了稳定性需要,常常会加入磁性编码器或光电编码器来予以辅助。未来,无感无刷电机柔顺控制必然成为控制的主流,并且基于神经网络的智能控制算法能够在其中起到重要作用。
关节电机在四足机器人中在应用
基于深度学习的四足机器人前景分析
四足机器人使用基于学习的方法,可以自主学习运动技能和指定的任务。未来的四足机器人的发展方向是将四足机器人智能感知能力和智能控制能力紧密融合,四足机器人的智能化水平得以提高,就可以在多领域进行部署。未来四足机器人的主要应用场景主要有工业领域和智能家居生态。
工业领域的应用前景
相较于轮式和履带式移动机器人,四足机器人具有更好的地形适应性和更小的地形破坏性,相较于其他腿足式机器人,具有更好的稳定性和更高的负载能力。四足机器人可以代替人类进入对生命安全造成威胁的场景,并完成一些工作任务。四足机器人背部具有丰富的扩展接口,搭载传感设备、巡检设备和操作终端后,可以完成地下矿井有毒气体检测、工厂设备温度检测、未知环境探测、管道电缆巡检、物资运送等工业场景任务。
智能家居场景的应用前景
四足机器人拥有近似宠物友好的外形,可以成为智慧家庭的一部分。四足机器人可以作为陪伴儿童和老人的智能宠物,通过加载自然语言交互系统、表情显示器以及触摸传感器等设备,实现与人类的智能情感交互。基于学习方法的四足机器人具有自主学习运动控制策略的能力和环境感知能力,机器人可以搭载立体相机和激光雷达等传感器实现与家庭环境的交互,学习到多种灵活敏捷的运动技能,实现智能化的环境感知。另外,连接云端以后,四足机器人个体学习到的运动策略可以共享到云端,也可以从云端获取其他机器人的运动技能,大大提高机器人的学习效率。基于深度强化学习方法的四足机器人有望推动智能家居和万物互联的发展。
四足机器人在电机技术上的问题
四足机器人大负载高扭矩电机瓶颈
如上文所述,大功率高扭矩无刷电机的发展,受限于功率开关元器件。因此,目前的四足机器人大多采用“电机+减速器”的方式实现驱动。在负重的工况下,四足机器人的电机必须在保证不被反向驱动的情况下,还能够平稳运动,具有非常大的难度。
由此可见,电机驱动技术在未来仍然具有及其广阔的发展空间。近几年,许多高校、科研院所也开始了直驱电机的研究,如果说减速器是为了保证电机性能而采用的折中方案,那么直驱技术则是未来发展的重要方向,而解决电机直驱的难题,关键问题之一便是电机驱动器的研发。
N沟道与P沟道场效应管融合的逆变电路
采用 3 个 N 型场效应管和 3 个 P 型场效应管,这样可避开驱动电压的 问题,这也是德国 MK 项目的电调采用的方案。P 型场效应管有点类似于 PNP 三极管,如下图所示。只要栅极电压小于源极电压( 为负值),并且其值小于某一负的阈值电压, 场效应管的 S 极和 D 极就会导通,电流从 S 极流向 D 极。一般 P 型功率型场效应管的 阈 值电压都会在-3 ~ -20V 之间。

总结
经过对“沪江机器人大讲堂”以及各类讲座、综述的分析,本文总结了电机驱动技术的未来发展前景,分析了电机控制技术与深度学习算法结合的可能性。最后,本文对未来发展和创业、就业机会总结如下:
- 随着电机技术的不断发展,许多传统行业能够被电机技术替代,如健身、按摩、人机交互等方面,这也将可能是将来创业的新风口
- 无刷电机驱动技术目前仍然有很大的发展空间,无论是科研还是就业,这方面具有的人才需求和缺口极大,十分适合本科毕业生纳入考虑范围
- 电机的柔顺控制技术与人工智能相结合,有可能成为电机控制领域发展和研究的新方向
- 无传感器的无刷电机控制方案目前已经相对成熟,未来的发展空间较小,但是目前该方法应该场景仍然较少,仍然是将来的主要趋势
- 协作机器人的人机交互是多学科交叉的具体应该,是将来社会对复合型人才需求的一个具体表现,对高校和企业人才培养有着一定的借鉴意义