Ubuntu安装 Docker CE,VNC访问docker图形界面并安装ROS
转载自:https://blog.csdn.net/jacka654321/article/details/83035415
Ubuntu安装 Docker CE,VNC访问docker图形界面并安装ROS
jacka654321 2018-10-14 10:57:13 6545 收藏 7
分类专栏: ROS Docker 文章标签: Ubuntu Docker VNC ROS 图形界面
版权
从包安装
如果您无法使用Docker的存储库来安装Docker CE,则可以下载.deb适用于您的发行版的 文件并手动安装。每次要升级Docker CE时都需要下载新文件。
转到https://download.docker.com/linux/ubuntu/dists/,选择你的Ubuntu版本,浏览pool/stable/和选择amd64, armhf,ppc64el,或s390x。
下载.deb要安装的Docker版本的文件:
树莓派3B+ Ubuntu mate
wget https://download.docker.com/linux/ubuntu/dists/xenial/pool/stable/armhf/docker-ce_17.03.2~ce-0~ubuntu-xenial_armhf.deb
虚拟机Ubuntu 16.04
wget https://download.docker.com/linux/ubuntu/dists/xenial/pool/stable/amd64/docker-ce_17.03.3~ce-0~ubuntu-xenial_amd64.deb
-
安装Docker CE,将下面的路径更改为您下载Docker软件包的路径。
sudo dpkg -i /path/to/package.deb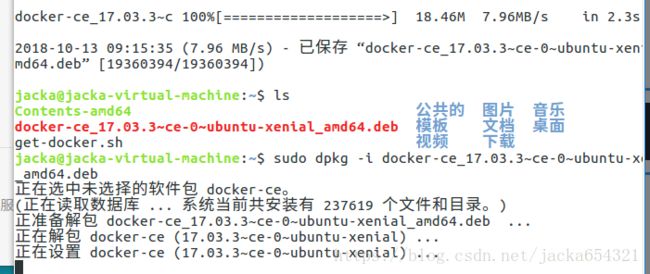
-
Docker守护程序自动启动。
-
通过运行
hello-world映像验证是否正确安装了Docker CE 。sudo docker run hello-world -
此命令下载测试映像并在容器中运行它。当容器运行时,它会打印一条信息性消息并退出。
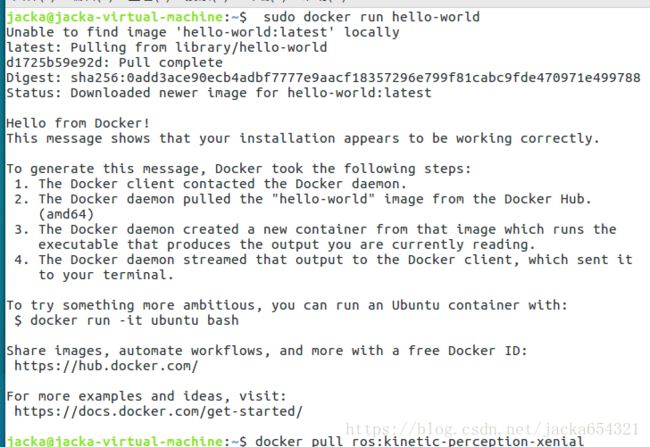
Docker CE已安装并正在运行。该docker组已创建,但未向其添加任何用户。您需要使用它sudo来运行Docker命令。继续执行Linux的安装后步骤,以允许非特权用户运行Docker命令和其他可选配置步骤。
docker下载ros镜像:
虚拟机Ubuntu16.04
sudo docker pull ros:kinetic-perception-xenialxenial: Ubuntu 16.04 VNC图形桌面不含ros
sudo docker pull dorowu/ubuntu-desktop-lxde-vnc:xenialxenial: Ubuntu 16.04 VNC图形桌面已安装ros
sudo docker push jacka654321/ubuntu-desktop-lxde-vnc:xenial-ros树莓派3B+ ros测试
sudo docker pull ros:kinetic-perception-xenial运行镜像:
sudo docker run -it --privileged --device /dev/vchiq --device /dev/video0 --env="DISPLAY" --env="QT_X11_NO_MITSHM=1" --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" ros:kinetic-perception-xenial
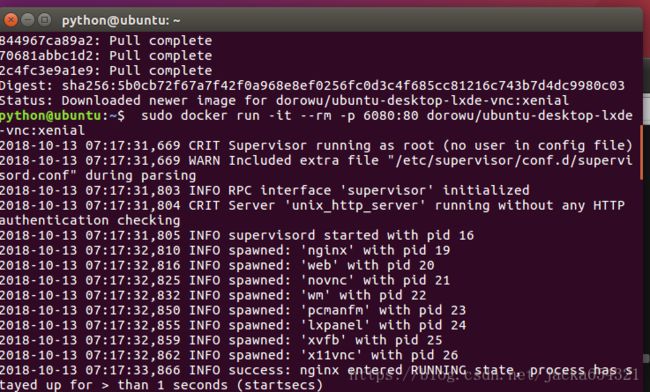
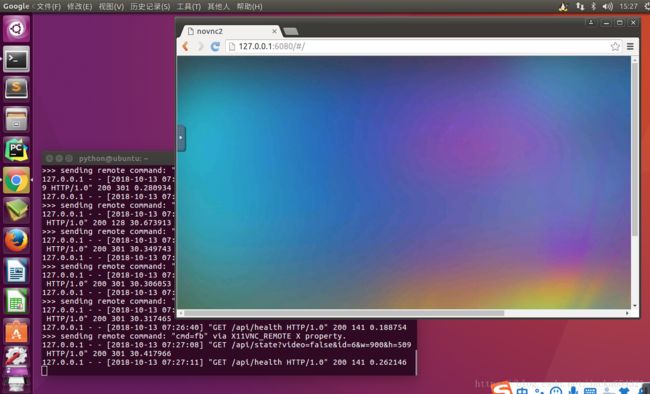
运行docker容器并使用端口访问 6080
sudo docker run -it --rm -p 6080:80 dorowu/ubuntu-desktop-lxde-vnc:xenial浏览http://127.0.0.1:6080/
VNC查看器
将VNC服务端口5900转发给主机
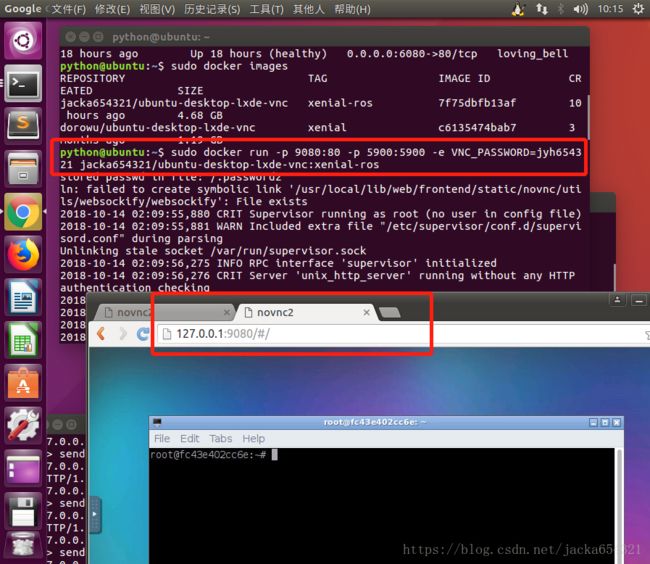
sudo docker run -p 9080:80 -p 5900:5900 jacka654321/ubuntu-desktop-lxde-vnc:xenial-ros现在,打开vnc查看器并连接到端口5900.如果您想通过密码保护vnc服务,请设置环境变量VNC_PASSWORD,例如
sudo docker run -p 9080:80 -p 5900:5900 -e VNC_PASSWORD=jyh654321 jacka654321/ubuntu-desktop-lxde-vnc:xenial-ros需要用到USB硬件设备,如Kinect,摄像头
sudo docker run --privileged --device /dev/vchi --device /dev/video0 -p 7080:80 -p 5901:5900 jacka654321/ubuntu-desktop-lxde-vnc:xenial-ros
注意,在虚拟机容器桌面复制命令需要,先复制到粘贴板,再右击粘贴,才能把命令发送到容器内;
在虚拟机 容器1338e4261c4d dorowu/ubuntu-desktop-lxde-vnc:xenial里安装ROS;
ros环境搭建-ubuntu16.04系统安装ROS Kinetic
https://blog.csdn.net/jacka654321/article/details/83015542
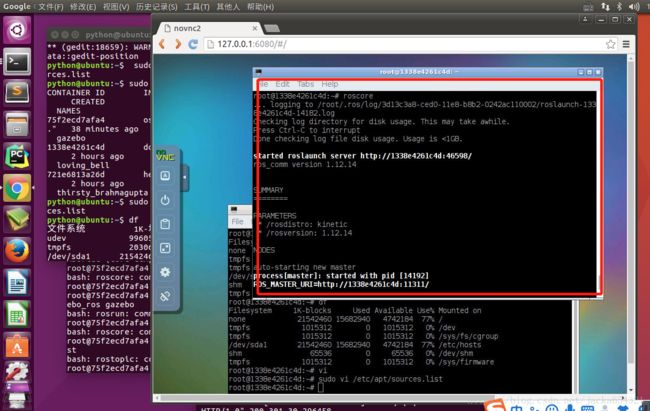
测试:
roscore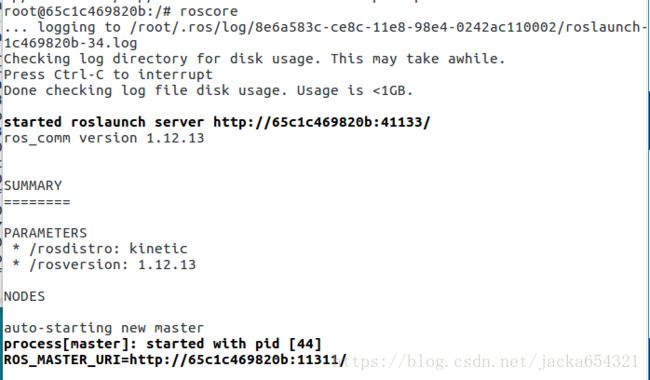
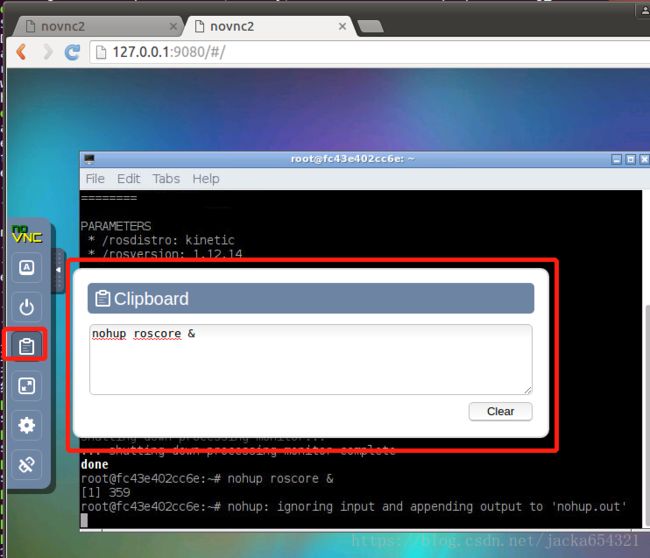
后台运行:
启动roscore后,在同一个终端窗口,输入:
nohup roscore &
nohup rosrun turtlesim turtlesim_node &
你还看到一只萌萌的海龟出现在屏幕上,那么该怎么样来操纵这只小海龟呢?不需要重新打开新的一个终端,直接输入即可:
rosrun turtlesim turtle_teleop_key
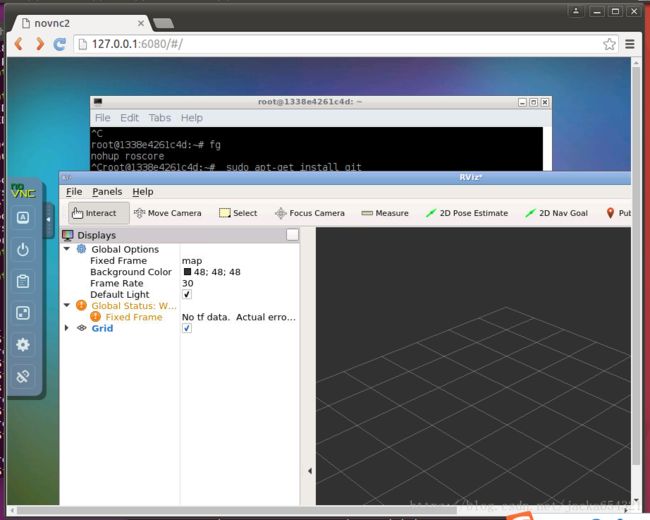
启动 rviz
nohup roscore &
rviz
安装ROS-Academy-for-Beginners教学包
然后在创建一个名为tutorial_ws的工作空间,在它的的src路径下克隆ROS-Academy-for-Beginners软件包
mkdir -p tutorial_ws/src
cd tutorial_ws/src
git clone https://github.com/DroidAITech/ROS-Academy-for-Beginners.git
安装依赖
并且安装ROS-Academy-for-Beginners所需要的依赖
cd ~/tutorial_ws
rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
注意:以上命令非常重要,缺少依赖将导致软件包无法正常编译和运行。
在开始编译之前,需要确保Gazebo在7.0版本以上
gazebo -v
如果你的Gazebo版本低于7.0,则需要进行升级
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install gazebo7
编译
接着回到catkin_ws下编译
cd ~/tutorial_ws
catkin_make
source ~/tutorial_ws/devel/setup.bash #刷新环境 方法一
rospack profile #刷新环境 方法二
注意:source命令,编译完成后必须刷新一下工作空间的环境,否则可能找不到工作空间。许多时候我们为了打开终端就能够运行工作空间中编译好的ROS程序,我们习惯把source ~/tutorial_ws/devel/setup.bash命令追加到~/.bashrc文件中(rosacademy_ws替换为你的工作空间名称),这样每次打开终端,系统就会刷新工作空间环境。你可以通过echo "source ~/tutorial_ws/devel/setup.bash" >> ~/.bashrc命令来追加。
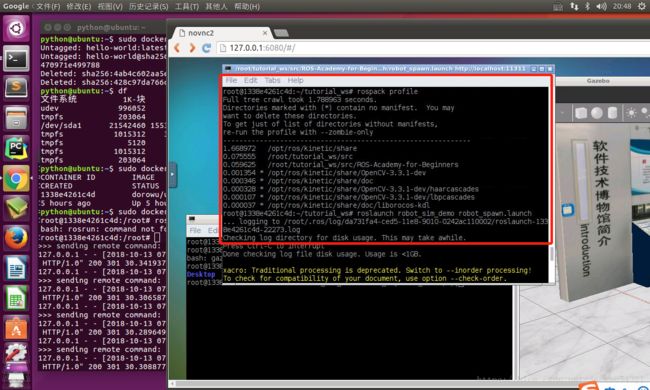
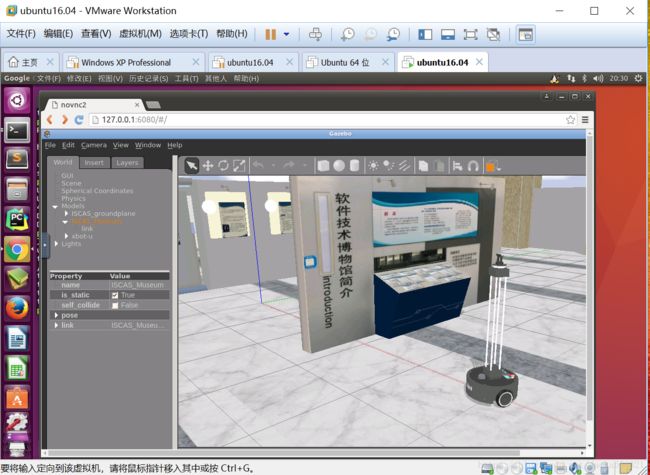
运行仿真程序
编译完成后就可以运行本教学配套的仿真了,输入
source ~/tutorial_ws/devel/setup.bash
rospack profile
roslaunch robot_sim_demo robot_spawn.launch
打开一个新的终端,输入以下命令,用键盘控制机器人移动
source ~/tutorial_ws/devel/setup.bash
rospack profile
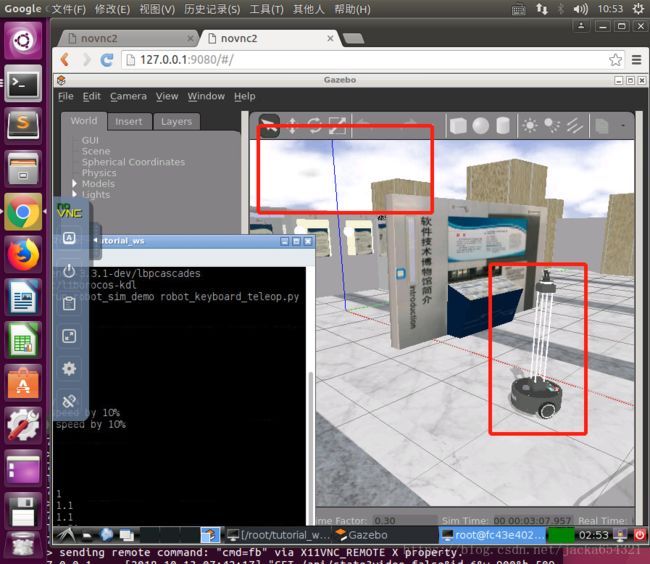
rosrun robot_sim_demo robot_keyboard_teleop.py
聚焦控制程序窗口,按下i、j、l等按键,这样你就可以通过键盘来控制机器人的移动了。
过程图如下,记得运行前要刷新环境,或者用上面的方法把刷新命令添加到脚本;不然出报错robot_sim_demo not found;
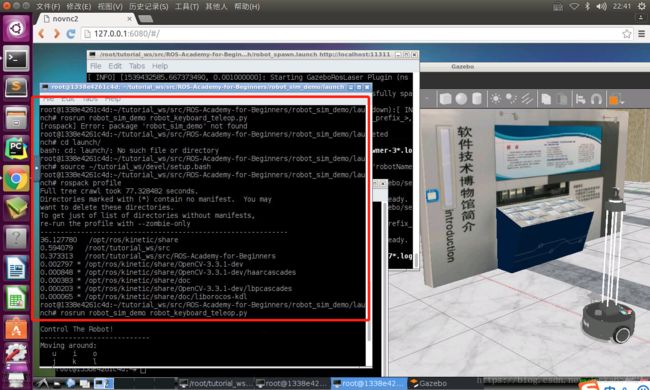
刚开启时,云会动;
启动键盘控制后,
转向控制键:
yui
jkl
m,.
速度控制键:
qwe
zxc

局域网访问,本例nat方式,只能在虚拟机内打开,设置 桥接,可在宿主浏览器(局域网内)访问;
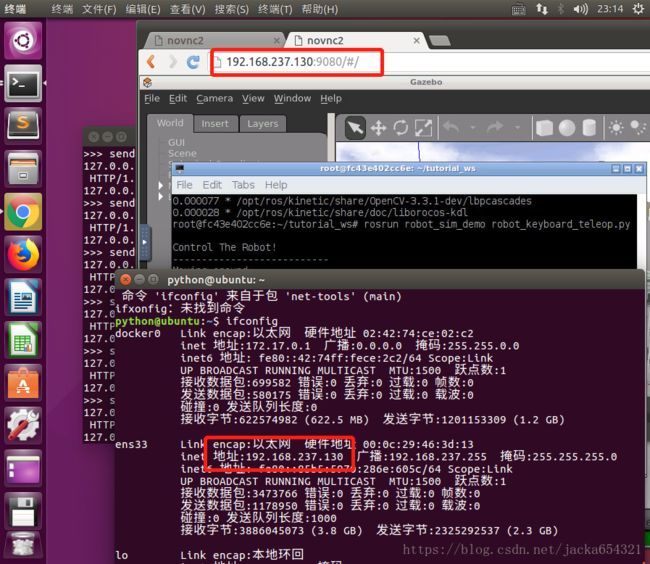
虚拟机设置frp,可实现外网访问;
https://blog.csdn.net/jacka654321/article/details/80879018
在虚拟机宿主,把容器打包成镜像:
sudo docker commit -m="xenial VNC ROS" -a="jacka654321" 1338e4261c4d jacka654321/ubuntu-desktop-lxde-vnc:xenial-ros
上传至你的dockerhub:
sudo docker login
发布镜像 :
将您的标记镜像上传到存储库: docker push username/repository:tag
sudo docker push jacka654321/ubuntu-desktop-lxde-vnc:xenial-ros

感兴趣可以下载体验一下:
sudo docker pull jacka654321/ubuntu-desktop-lxde-vnc:xenial-ros虚拟机Ubuntu系统里下载,
sudo docker pull osrf/gazebo:gzweb8运行
sudo docker run -it --privileged --device /dev/vchiq --device /dev/video0 --env="DISPLAY" --env="QT_X11_NO_MITSHM=1" --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" -v="/tmp/.gazebo/:/root/.gazebo/" --name=gazebo8 osrf/gazebo:gzweb8
虚拟机Ubuntu系统部署示例
在这个简短的例子中,我们将启动一个运行gazebo服务器的新容器,使用本地gazebo客户端连接到它,然后产生一个双倒立摆并记录模拟以供以后回放。
首先启动一个带安装卷的gazebo服务器进行日志记录并命名容器gazebo:
docker run -d -v="/tmp/.gazebo/:/root/.gazebo/" --name=gazebo osrf/gazebo:gzweb8
现在使用相同的入口点在容器中打开一个新的bash会话来配置环境。然后下载double_pendulum模型并将其加载到模拟中。
sudo docker exec -it 75f2ecd7afa4 bash
进入容器后需要更换源:
备份原来的源
sudo cp /etc/apt/sources.list /etc/apt/sources_init.list将以前的源备份一下,以防以后可以用的。
更换源
sudo gedit /etc/apt/sources.list将下面所有内容复制,粘贴并覆盖sources.list文件中的所有内容;
阿里云
# deb cdrom:[Ubuntu 16.04 LTS _Xenial Xerus_ - Release amd64 (20160420.1)]/ xenial main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial main restricted #Added by software-properties
# See http://help.ubuntu.com/community/UpgradeNotes for how to upgrade to
# newer versions of the distribution.
deb http://mirrors.aliyun.com/ubuntu/ xenial main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial multiverse universe #Added by software-properties
# deb-src http://us.archive.ubuntu.com/ubuntu/ xenial main restricted
## Major bug fix updates produced after the final release of the
## distribution.
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-updates multiverse restricted universe main #Added by software-properties
# deb-src http://us.archive.ubuntu.com/ubuntu/ xenial-updates main restricted
## N.B. software from this repository is ENTIRELY UNSUPPORTED by the Ubuntu
## team, and may not be under a free licence. Please satisfy yourself as to
## your rights to use the software. Also, please note that software in
## universe WILL NOT receive any review or updates from the Ubuntu security
## team.
deb http://mirrors.aliyun.com/ubuntu/ xenial universe
# deb-src http://us.archive.ubuntu.com/ubuntu/ xenial universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates universe
# deb-src http://us.archive.ubuntu.com/ubuntu/ xenial-updates universe
## N.B. software from this repository is ENTIRELY UNSUPPORTED by the Ubuntu
## team, and may not be under a free licence. Please satisfy yourself as to
## your rights to use the software. Also, please note that software in
## multiverse WILL NOT receive any review or updates from the Ubuntu
## security team.
deb http://mirrors.aliyun.com/ubuntu/ xenial multiverse
# deb-src http://us.archive.ubuntu.com/ubuntu/ xenial multiverse
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates multiverse
# deb-src http://us.archive.ubuntu.com/ubuntu/ xenial-updates multiverse
## N.B. software from this repository may not have been tested as
## extensively as that contained in the main release, although it includes
## newer versions of some applications which may provide useful features.
## Also, please note that software in backports WILL NOT receive any review
## or updates from the Ubuntu security team.
deb http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse #Added by software-properties
# deb-src http://us.archive.ubuntu.com/ubuntu/ xenial-backports main restricted universe multiverse
## Uncomment the following two lines to add software from Canonical's
## 'partner' repository.
## This software is not part of Ubuntu, but is offered by Canonical and the
## respective vendors as a service to Ubuntu users.
# deb http://archive.canonical.com/ubuntu xenial partner
# deb-src http://archive.canonical.com/ubuntu xenial partner
deb http://mirrors.aliyun.com/ubuntu/ xenial-security main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-security multiverse restricted universe main #Added by software-properties
# deb-src http://security.ubuntu.com/ubuntu xenial-security main restricted
deb http://mirrors.aliyun.com/ubuntu/ xenial-security universe
# deb-src http://security.ubuntu.com/ubuntu xenial-security universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-security multiverse
# deb-src http://security.ubuntu.com/ubuntu xenial-security multiverse清华源
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
如果容器内没有gedit nano vi等文本编辑工具,需要从宿主复制过去;
sudo docker cp /etc/apt/sources.list 75f2ecd7afa4:/etc/apt/sources.list
sudo docker cp /etc/apt/sources.list 1338e4261c4d:/etc/apt/sources.list
让更新源生效
sudo apt-get update配置环境
apt-get update && apt-get install -y curl
curl -o double_pendulum.sdf http://models.gazebosim.org/double_pendulum_with_base/model-1_4.sdf
gz model --model-name double_pendulum --spawn-file double_pendulum.sdf要开始记录正在运行的模拟,只需使用
gz log即可。
gz log --record 1几秒钟后,通过禁用相同的标志继续并停止录制。
gz log --record 0为了反省我们记录的记录,我们可以导航到日志目录并用于
gz log打开和检查钟摆的运动和关节状态。这将允许您逐步摆过摆链的姿势。
cd ~/.gazebo/log/*/gzserver/
gz log --step --hz 10 --filter *.pose/*.pose --file state.log如果您在本地安装了等效的Gazebo版本,则可以使用gzclient GUI连接到容器内的gzserver,方法是将主URI的地址设置为容器公共地址。
export GAZEBO_MASTER_IP=$(docker inspect --format '{{ .NetworkSettings.IPAddress }}' gazebo)
export GAZEBO_MASTER_URI=$GAZEBO_MASTER_IP:11345
gzclient --verbose在使用gzclient渲染的OpenGL视图中,您应该看到先前仍在振荡的移动双摆。从这里,您可以使用图形界面控制或监控模拟状态,添加更多摆锤,重置世界,生成更多日志等。要退出模拟,请关闭gzclient窗口并停止容器。
docker stop gazebo
docker rm gazebo即使我们的旧凉亭容器已被移除,我们仍然可以看到我们的记录日志已保留在主机卷目录中。
cd /tmp/.gazebo/log/
ls同样,如果您在主机系统上安装了等效的Gazebo版本,则可以使用记录的日志文件使用Gazebo回放模拟。
export GAZEBO_MASTER_IP=127.0.0.1
export GAZEBO_MASTER_URI=$GAZEBO_MASTER_IP:11345
cd /tmp/.gazebo/log/*/gzserver/
gazebo --verbose --play state.log使用教程:
https://hub.docker.com/_/gazebo/
参考链接:
通过VNC访问docker容器的图形界面
https://blog.csdn.net/spylyt/article/details/79944772
https://hub.docker.com/r/dorowu/ubuntu-desktop-lxde-vnc/
用于ARM和Debian的ROS Docker镜像
https://blog.csdn.net/ZhangRelay/article/details/77504626
https://github.com/osrf/docker_images
https://hub.docker.com/r/osrf/gazebo/
Ubuntu与ROS的Docker桌面系统与ROS在线练习课程(在线Linux虚拟机)
https://blog.csdn.net/ZhangRelay/article/details/73522385
https://www.shiyanlou.com/courses/63
ROS_安装一个第三方仿真软件包——机器人模拟世界
http://www.imooc.com/article/252345