mpu6050-kalman- no dmp,f407
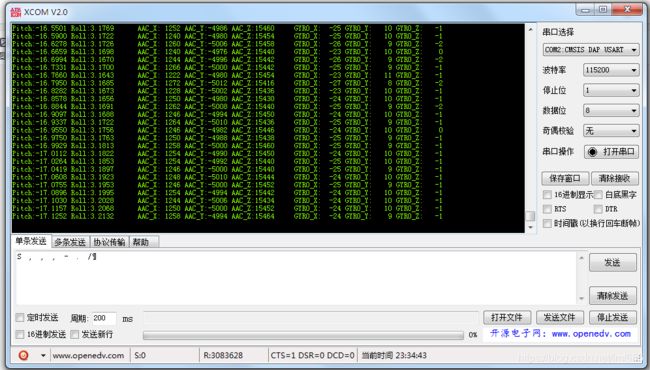
通过定时器3,定时20ms,进行kalman滤波,读取角度。
利用串口助手,发送角度到
用软件iic,pg5,pg6,两个IO口模拟IIC,,代码主要有四个。

mpuiic.h
#ifndef __MPUIIC_H
#define __MPUIIC_H
#include "sys.h"
//正点原子MPU6050通讯线驱动
//IO方向设置
//#define MPU_SDA_IN() {GPIOG->CRL&=0X0FFFFFFF;GPIOG->CRL|=(u32)8<<28;}
//#define MPU_SDA_OUT() {GPIOG->CRL&=0X0FFFFFFF;GPIOG->CRL|=(u32)3<<28;}
//IO操作函数 G5--SCL;G6--SDA
#define MPU_IIC_SCL PGout(5) //SCL
#define MPU_IIC_SDA PGout(6) //SDA
#define MPU_READ_SDA PGin(6) //输入SDA PB2
//IIC所有操作函数
void MPU_SDA_OUT();
void MPU_SDA_IN();
void MPU_IIC_Delay(void); //MPU IIC延时函数
void MPU_IIC_Init(void); //初始化IIC的IO口
void MPU_IIC_Start(void); //发送IIC开始信号
void MPU_IIC_Stop(void); //发送IIC停止信号
void MPU_IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 MPU_IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 MPU_IIC_Wait_Ack(void); //IIC等待ACK信号
void MPU_IIC_Ack(void); //IIC发送ACK信号
void MPU_IIC_NAck(void); //IIC不发送ACK信号
void IMPU_IC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
u8 MPU_IIC_Read_One_Byte(u8 daddr,u8 addr);
#endif
mpuiic.c
#include "mpuiic.h"
#include "delay.h"
//正点原子MPU6050通讯线驱动
void MPU_SDA_OUT()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG, ENABLE);//使能 GPIOF 时钟
//GPIOF9,F10 初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;//LED0 和 LED1 对应 IO 口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOG, &GPIO_InitStructure);//初始化 GPIO
GPIO_SetBits(GPIOG,GPIO_Pin_6);//GPIOF9,F10 设置高,灯灭
}
void MPU_SDA_IN()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG, ENABLE);//使能 GPIOF 时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;//LED0 和 LED1 对应 IO 口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOG, &GPIO_InitStructure);//初始化 GPIO
}
//MPU IIC 延时函数
void MPU_IIC_Delay(void)
{
delay_us(2);
}
//初始化IIC
void MPU_IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG,ENABLE);//先使能外设IO PORTB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6; // 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //推挽输出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //IO口速度为50MHz
GPIO_Init(GPIOG, &GPIO_InitStructure); //根据设定参数初始化GPIO
GPIO_SetBits(GPIOG,GPIO_Pin_5|GPIO_Pin_6); //PB7,PB6 输出高
}
//产生IIC起始信号
void MPU_IIC_Start(void)
{
MPU_SDA_OUT(); //sda线输出
MPU_IIC_SDA=1;
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SDA=0;//START:when CLK is high,DATA change form high to low
MPU_IIC_Delay();
MPU_IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void MPU_IIC_Stop(void)
{
MPU_SDA_OUT();//sda线输出
MPU_IIC_SCL=0;
MPU_IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
MPU_IIC_Delay();
MPU_IIC_SCL=1;
MPU_IIC_SDA=1;//发送I2C总线结束信号
MPU_IIC_Delay();
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 MPU_IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
MPU_SDA_IN(); //SDA设置为输入
MPU_IIC_SDA=1;MPU_IIC_Delay();
MPU_IIC_SCL=1;MPU_IIC_Delay();
while(MPU_READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_SCL=0;//时钟输出0
return 0;
}
//产生ACK应答
void MPU_IIC_Ack(void)
{
MPU_IIC_SCL=0;
MPU_SDA_OUT();
MPU_IIC_SDA=0;
MPU_IIC_Delay();
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
}
//不产生ACK应答
void MPU_IIC_NAck(void)
{
MPU_IIC_SCL=0;
MPU_SDA_OUT();
MPU_IIC_SDA=1;
MPU_IIC_Delay();
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void MPU_IIC_Send_Byte(u8 txd)
{
u8 t;
MPU_SDA_OUT();
MPU_IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
MPU_IIC_SDA=(txd&0x80)>>7;
txd<<=1;
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
MPU_IIC_Delay();
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 MPU_IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
MPU_SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
MPU_IIC_SCL=0;
MPU_IIC_Delay();
MPU_IIC_SCL=1;
receive<<=1;
if(MPU_READ_SDA)receive++;
MPU_IIC_Delay();
}
if (!ack)
MPU_IIC_NAck();//发送nACK
else
MPU_IIC_Ack(); //发送ACK
return receive;
}
mpu6050.h
#ifndef __MPU6050_H
#define __MPU6050_H
#include "mpuiic.h"
//正点原子MPU6050驱动
//#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到
//#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
//如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位).
//如果接V3.3,则IIC地址为0X69(不包含最低位).
#define MPU_ADDR 0X68
因为模块AD0默认接GND,所以转为读写地址后,为0XD1和0XD0(如果接VCC,则为0XD3和0XD2)
//#define MPU_READ 0XD1
//#define MPU_WRITE 0XD0
void MPU_Init(void); //初始化MPU6050
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf);//IIC连续写
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf); //IIC连续读
u8 MPU_Write_Byte(u8 reg,u8 data); //IIC写一个字节
u8 MPU_Read_Byte(u8 reg); //IIC读一个字节
short MPU_Get_Temperature(void);
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz);
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az);
#endif
mpu6050.c
#include "mpu6050.h"
#include "sys.h"
#include "delay.h"
#include "usart.h"
//正点原子MPU6050驱动
//初始化MPU6050
void MPU_Init(void)
{
MPU_IIC_Init();//初始化IIC总线
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x00);//解除休眠状态
MPU_Write_Byte(MPU_SAMPLE_RATE_REG,0x07);//陀螺仪采样率,典型值:0x07(125Hz)
MPU_Write_Byte(MPU_CFG_REG,0x06);//低通滤波频率,典型值:0x06(5Hz)
MPU_Write_Byte(MPU_GYRO_CFG_REG,0x18);//陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
MPU_Write_Byte(MPU_ACCEL_CFG_REG,0x01);//加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz)
}
//得到温度值
//返回值:温度值(扩大了100倍)
short MPU_Get_Temperature(void)
{
u8 buf[2];
short raw;
float temp;
MPU_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf);
raw=((u16)buf[0]<<8)|buf[1];
temp=36.53+((double)raw)/340;
return temp*100;
}
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((u16)buf[0]<<8)|buf[1];
*gy=((u16)buf[2]<<8)|buf[3];
*gz=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
//得到加速度值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
if(res==0)
{
*ax=((u16)buf[0]<<8)|buf[1];
*ay=((u16)buf[2]<<8)|buf[3];
*az=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
//IIC连续写
//addr:器件地址
//reg:寄存器地址
//len:写入长度
//buf:数据区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
for(i=0;i<len;i++)
{
MPU_IIC_Send_Byte(buf[i]); //发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_Stop();
return 0;
}
//IIC连续读
//addr:器件地址
//reg:要读取的寄存器地址
//len:要读取的长度
//buf:读取到的数据存储区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
while(len)
{
if(len==1)*buf=MPU_IIC_Read_Byte(0);//读数据,发送nACK
else *buf=MPU_IIC_Read_Byte(1); //读数据,发送ACK
len--;
buf++;
}
MPU_IIC_Stop(); //产生一个停止条件
return 0;
}
//IIC写一个字节
//reg:寄存器地址
//data:数据
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Byte(u8 reg,u8 data)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(data);//发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Stop();
return 0;
}
//IIC读一个字节
//reg:寄存器地址
//返回值:读到的数据
u8 MPU_Read_Byte(u8 reg)
{
u8 res;
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
res=MPU_IIC_Read_Byte(0);//读取数据,发送nACK
MPU_IIC_Stop(); //产生一个停止条件
return res;
}
kalman.h
#ifndef __KALMAN_H
#define __KALMAN_H
//卡尔曼解算法库
extern float Angle_X_Final; //解算后俯仰角
extern float Angle_Y_Final; //解算后横滚角
extern short temperature; //陀螺仪温度数据
extern short aacx,aacy,aacz; //加速度传感器原始数据 angular acceleration
extern short gyrox,gyroy,gyroz; //陀螺仪原始数据 gyroscope
void Angle_Calcu(void);
void Kalman_Filter_X(float Accel,float Gyro);
void Kalman_Filter_Y(float Accel,float Gyro);
#endif
kalman.c
#include "kalman.h"
#include "mpu6050.h"
#include "math.h"
//卡尔曼解算法库
short aacx,aacy,aacz; //加速度传感器原始数据
short gyrox,gyroy,gyroz; //陀螺仪原始数据
short temperature; //陀螺仪温度数据
float Accel_x; //X轴加速度值暂存
float Accel_y; //Y轴加速度值暂存
float Accel_z; //Z轴加速度值暂存
float Gyro_x; //X轴陀螺仪数据暂存
float Gyro_y; //Y轴陀螺仪数据暂存
float Gyro_z; //Z轴陀螺仪数据暂存
float Angle_x_temp; //由加速度计算的x倾斜角度
float Angle_y_temp; //由加速度计算的y倾斜角度
float Angle_X_Final; //X最终倾斜角度
float Angle_Y_Final; //Y最终倾斜角度
//读取数据预处理
void Angle_Calcu(void)
{
//1.原始数据读取
float accx,accy,accz;//三方向角加速度值
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据
temperature = MPU_Get_Temperature(); //得到温度值
Accel_x = aacx;//x轴加速度值暂存
Accel_y = aacy;//y轴加速度值暂存
Accel_z = aacz;//z轴加速度值暂存
Gyro_x = gyrox;//x轴陀螺仪值暂存
Gyro_y = gyroy;//y轴陀螺仪值暂存
Gyro_z = gyroz;//z轴陀螺仪值暂存
//2.角加速度原始值处理过程
//加速度传感器配置寄存器0X1C内写入0x01,设置范围为±2g。换算关系:2^16/4 = 16384LSB/g
if(Accel_x<32764) accx=Accel_x/16384;//计算x轴加速度
else accx=1-(Accel_x-49152)/16384;
if(Accel_y<32764) accy=Accel_y/16384;//计算y轴加速度
else accy=1-(Accel_y-49152)/16384;
if(Accel_z<32764) accz=Accel_z/16384;//计算z轴加速度
else accz=(Accel_z-49152)/16384;
//加速度反正切公式计算三个轴和水平面坐标系之间的夹角
Angle_x_temp=(atan(accy/accz))*180/3.14;
Angle_y_temp=(atan(accx/accz))*180/3.14;
//判断计算后角度的正负号
if(Accel_x<32764) Angle_y_temp = +Angle_y_temp;
if(Accel_x>32764) Angle_y_temp = -Angle_y_temp;
if(Accel_y<32764) Angle_x_temp = +Angle_x_temp;
if(Accel_y>32764) Angle_x_temp = -Angle_x_temp;
//3.角速度原始值处理过程
//陀螺仪配置寄存器0X1B内写入0x18,设置范围为±2000deg/s。换算关系:2^16/4000=16.4LSB/(°/S)
计算角速度
if(Gyro_x<32768) Gyro_x=-(Gyro_x/16.4);
if(Gyro_x>32768) Gyro_x=+(65535-Gyro_x)/16.4;
if(Gyro_y<32768) Gyro_y=-(Gyro_y/16.4);
if(Gyro_y>32768) Gyro_y=+(65535-Gyro_y)/16.4;
if(Gyro_z<32768) Gyro_z=-(Gyro_z/16.4);
if(Gyro_z>32768) Gyro_z=+(65535-Gyro_z)/16.4;
//4.调用卡尔曼函数
Kalman_Filter_X(Angle_x_temp,Gyro_x); //卡尔曼滤波计算X倾角
Kalman_Filter_Y(Angle_y_temp,Gyro_y); //卡尔曼滤波计算Y倾角
}
//卡尔曼参数
float Q_angle = 0.001; //角度数据置信度,角度噪声的协方差
float Q_gyro = 0.003; //角速度数据置信度,角速度噪声的协方差
float R_angle = 0.5; //加速度计测量噪声的协方差
float dt = 0.02; //滤波算法计算周期,由定时器定时20ms
char C_0 = 1; //H矩阵值
float Q_bias, Angle_err; //Q_bias:陀螺仪的偏差 Angle_err:角度偏量
float PCt_0, PCt_1, E; //计算的过程量
float K_0, K_1, t_0, t_1; //卡尔曼增益 K_0:用于计算最优估计值 K_1:用于计算最优估计值的偏差 t_0/1:中间变量
float P[4] ={0,0,0,0}; //过程协方差矩阵的微分矩阵,中间变量
float PP[2][2] = { { 1, 0 },{ 0, 1 } };//过程协方差矩阵P
void Kalman_Filter_X(float Accel,float Gyro) //卡尔曼函数
{
//步骤一,先验估计
//公式:X(k|k-1) = AX(k-1|k-1) + BU(k)
//X = (Angle,Q_bias)
//A(1,1) = 1,A(1,2) = -dt
//A(2,1) = 0,A(2,2) = 1
Angle_X_Final += (Gyro - Q_bias) * dt; //状态方程,角度值等于上次最优角度加角速度减零漂后积分
//步骤二,计算过程协方差矩阵的微分矩阵
//公式:P(k|k-1)=AP(k-1|k-1)A^T + Q
//Q(1,1) = cov(Angle,Angle) Q(1,2) = cov(Q_bias,Angle)
//Q(2,1) = cov(Angle,Q_bias) Q(2,2) = cov(Q_bias,Q_bias)
P[0]= Q_angle - PP[0][1] - PP[1][0];
P[1]= -PP[1][1];// 先验估计误差协方差
P[2]= -PP[1][1];
P[3]= Q_gyro;
PP[0][0] += P[0] * dt;
PP[0][1] += P[1] * dt;
PP[1][0] += P[2] * dt;
PP[1][1] += P[3] * dt;
//步骤三,计算卡尔曼增益
//公式:Kg(k)= P(k|k-1)H^T/(HP(k|k-1)H^T+R)
//Kg = (K_0,K_1) 对应Angle,Q_bias增益
//H = (1,0) 可由z=HX+v求出z:Accel
PCt_0 = C_0 * PP[0][0];
PCt_1 = C_0 * PP[1][0];
E = R_angle + C_0 * PCt_0;
K_0 = PCt_0 / E;
K_1 = PCt_1 / E;
//步骤四,后验估计误差协方差
//公式:P(k|k)=(I-Kg(k)H)P(k|k-1)
//也可写为:P(k|k)=P(k|k-1)-Kg(k)HP(k|k-1)
t_0 = PCt_0;
t_1 = C_0 * PP[0][1];
PP[0][0] -= K_0 * t_0;
PP[0][1] -= K_0 * t_1;
PP[1][0] -= K_1 * t_0;
PP[1][1] -= K_1 * t_1;
//步骤五,计算最优角速度值
//公式:X(k|k)= X(k|k-1)+Kg(k)(Z(k)-X(k|k-1))
Angle_err = Accel - Angle_X_Final; //Z(k)先验估计 计算角度偏差
Angle_X_Final += K_0 * Angle_err; //后验估计,给出最优估计值
Q_bias += K_1 * Angle_err; //后验估计,跟新最优估计值偏差
Gyro_x = Gyro - Q_bias;
}
void Kalman_Filter_Y(float Accel,float Gyro)
{
Angle_Y_Final += (Gyro - Q_bias) * dt;
P[0]=Q_angle - PP[0][1] - PP[1][0];
P[1]=-PP[1][1];
P[2]=-PP[1][1];
P[3]=Q_gyro;
PP[0][0] += P[0] * dt;
PP[0][1] += P[1] * dt;
PP[1][0] += P[2] * dt;
PP[1][1] += P[3] * dt;
Angle_err = Accel - Angle_Y_Final;
PCt_0 = C_0 * PP[0][0];
PCt_1 = C_0 * PP[1][0];
E = R_angle + C_0 * PCt_0;
K_0 = PCt_0 / E;
K_1 = PCt_1 / E;
t_0 = PCt_0;
t_1 = C_0 * PP[0][1];
PP[0][0] -= K_0 * t_0;
PP[0][1] -= K_0 * t_1;
PP[1][0] -= K_1 * t_0;
PP[1][1] -= K_1 * t_1;
Angle_Y_Final += K_0 * Angle_err;
Q_bias += K_1 * Angle_err;
Gyro_y = Gyro - Q_bias;
}
timer.h
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
#include "stm32f4xx.h"
#include "delay.h"
#include "stm32f4xx_syscfg.h"
void TIMER3_Init(u16 arr,u16 psc);//初始化
#endif
timer.c
#include "timer.h"
#include "led.h"
#include "oled.h"
#include "kalman.h"
#include "usart.h"
//通用定时器 3 中断初始化
//arr:自动重装值。 psc:时钟预分频数
//定时器溢出时间计算方法:Tout=((arr+1)*(psc+1))/Ft us.
//Ft=定时器工作频率,单位:Mhz
//这里使用的是定时器 3!
void TIMER3_Init(u16 arr,u16 psc)//初始化
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //①使能 TIM3 时钟
TIM_TimeBaseInitStructure.TIM_Period = arr; //自动重装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);// ②初始化定时器 TIM3
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //③允许定时器 3 更新中断
NVIC_InitStructure.NVIC_IRQChannel=TIM3_IRQn; //定时器 3 中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x01; //抢占优先级 1
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x03; //响应优先级 3
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);// ④初始化 NVIC
TIM_Cmd(TIM3,DISABLE); //⑤使能定时器 3 DISABLE
}
//定时器 3 中断服务函数
void TIM3_IRQHandler(void)
{
static int ttt=0;
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET) //溢出中断
{ Angle_Calcu();
ttt++;
if(ttt==2)
{
ttt=0;
printf("Pitch:%.4f Roll:%.4f \
AAC_X:%5d AAC_Y:%5d AAC_Z:%5d \
GYRO_X:%5d GYRO_Y:%5d GYRO_Z:%5d\r\n",\
Angle_X_Final,Angle_Y_Final,aacx,aacy,aacz,\
gyrox,gyroy,gyroz);//串口发送实时俯仰角,横滚角,XYZ三轴角加速度原始值,XYZ三轴角速度原始值
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位
}
}
main.c
#include "sys.h"
#include "usart.h"
#include "delay.h"
#include "led.h"
#include "oled.h"
#include "mpu6050.h"//MPU6050驱动库
#include "kalman.h"//卡尔曼解算法库
int main(void)
{
int shuzi=987;
float aa=123.456;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);//中断优先级分组函数
delay_init(168);
LED_Init();
uart_init(115200);
printf("begin\r\n");
MPU_Init();//MPU6050初始化
delay_ms(300);
TIMER3_Init(200-1,8400-1);//初始化TIMER3_Init(5000-1,8400-1);
//定时器时钟 84M,分频系数 8400,所以 84M/8400=10Khz
//的计数频率,计数 5000 次为 500ms 1ms--10 20ms==200
TIM_Cmd(TIM3,ENABLE); //⑤使能定时器 3 DISABLE
while(1)
{
}
}
结论,可以绕x,y轴转动,注意范围,范围不能太大。在某个范围