YOLOv8改进 | 主干篇 | EfficientNetV1均衡缩放网络改进特征提取层
一、本文介绍
这次给大家带来的改进机制是EfficientNetV1主干,用其替换我们YOLOv8的特征提取网络,其主要思想是通过均衡地缩放网络的深度、宽度和分辨率,以提高卷积神经网络的性能。这种方法采用了一个简单但有效的复合系数,统一调整所有维度。经过我的实验该主干网络确实能够涨点在大中小三种物体检测上,同时该主干网络提供多种版本,大家可以在源代码中进行修改版本的使用。本文通过介绍其主要框架原理,然后教大家如何添加该网络结构到网络模型中。
推荐指数:⭐⭐⭐⭐⭐
涨点效果:⭐⭐⭐⭐⭐
专栏回顾:YOLOv8改进系列专栏——本专栏持续复习各种顶会内容——科研必备
训练结果对比图->

目录
一、本文介绍
二、EfficientNetV1的框架原理
三、EfficientNetV1的核心代码
四、手把手教你添加EfficientNetV1机制
修改一
修改二
修改三
修改四
修改五
修改六
修改七
修改八
五、EfficientNetV1的yaml文件
六、成功运行记录
七、本文总结
二、EfficientNetV1的框架原理

官方论文地址: 官方论文地址点击即可跳转
官方代码地址: 官方代码地址点击即可跳转

EfficientNetV1的主要思想是通过均衡地缩放网络的深度、宽度和分辨率,以提高卷积神经网络的性能。这种方法采用了一个简单但有效的复合系数,统一调整所有维度。EfficientNet在多个方面优于现有的ConvNets,特别是在ImageNet数据集上,EfficientNet-B7模型在保持较小的大小和更快的推理速度的同时,达到了84.3%的顶级准确率。此外,EfficientNet还在CIFAR-100和Flowers等其他数据集上展示了出色的迁移学习性能,参数数量大大减少。
总结:EfficientNetV1的主要创新为提出了一种新的模型缩放方法,该方法使用一个复合系数来统一地缩放网络的深度、宽度和分辨率,实现更均衡的网络扩展
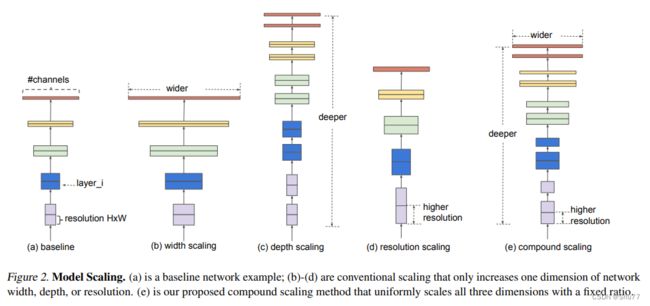 这张图展示了EfficientNet提出的模型缩放方法。图中(a)表示基线网络,而图(b)-(d)表示传统的缩放方法,只增加网络的一个维度:宽度、深度或分辨率。图(e)展示了EfficientNet的创新之处,即复合缩放方法,它使用固定比例同时均匀地缩放网络的所有三个维度。
这张图展示了EfficientNet提出的模型缩放方法。图中(a)表示基线网络,而图(b)-(d)表示传统的缩放方法,只增加网络的一个维度:宽度、深度或分辨率。图(e)展示了EfficientNet的创新之处,即复合缩放方法,它使用固定比例同时均匀地缩放网络的所有三个维度。
三、EfficientNetV1的核心代码
import re
import math
import collections
from functools import partial
import torch
from torch import nn
from torch.nn import functional as F
from torch.utils import model_zoo
# Parameters for the entire model (stem, all blocks, and head)
GlobalParams = collections.namedtuple('GlobalParams', [
'width_coefficient', 'depth_coefficient', 'image_size', 'dropout_rate',
'num_classes', 'batch_norm_momentum', 'batch_norm_epsilon',
'drop_connect_rate', 'depth_divisor', 'min_depth', 'include_top'])
# Parameters for an individual model block
BlockArgs = collections.namedtuple('BlockArgs', [
'num_repeat', 'kernel_size', 'stride', 'expand_ratio',
'input_filters', 'output_filters', 'se_ratio', 'id_skip'])
# Set GlobalParams and BlockArgs's defaults
GlobalParams.__new__.__defaults__ = (None,) * len(GlobalParams._fields)
BlockArgs.__new__.__defaults__ = (None,) * len(BlockArgs._fields)
# Swish activation function
if hasattr(nn, 'SiLU'):
Swish = nn.SiLU
else:
# For compatibility with old PyTorch versions
class Swish(nn.Module):
def forward(self, x):
return x * torch.sigmoid(x)
# A memory-efficient implementation of Swish function
class SwishImplementation(torch.autograd.Function):
@staticmethod
def forward(ctx, i):
result = i * torch.sigmoid(i)
ctx.save_for_backward(i)
return result
@staticmethod
def backward(ctx, grad_output):
i = ctx.saved_tensors[0]
sigmoid_i = torch.sigmoid(i)
return grad_output * (sigmoid_i * (1 + i * (1 - sigmoid_i)))
class MemoryEfficientSwish(nn.Module):
def forward(self, x):
return SwishImplementation.apply(x)
def round_filters(filters, global_params):
"""Calculate and round number of filters based on width multiplier.
Use width_coefficient, depth_divisor and min_depth of global_params.
Args:
filters (int): Filters number to be calculated.
global_params (namedtuple): Global params of the model.
Returns:
new_filters: New filters number after calculating.
"""
multiplier = global_params.width_coefficient
if not multiplier:
return filters
# TODO: modify the params names.
# maybe the names (width_divisor,min_width)
# are more suitable than (depth_divisor,min_depth).
divisor = global_params.depth_divisor
min_depth = global_params.min_depth
filters *= multiplier
min_depth = min_depth or divisor # pay attention to this line when using min_depth
# follow the formula transferred from official TensorFlow implementation
new_filters = max(min_depth, int(filters + divisor / 2) // divisor * divisor)
if new_filters < 0.9 * filters: # prevent rounding by more than 10%
new_filters += divisor
return int(new_filters)
def round_repeats(repeats, global_params):
"""Calculate module's repeat number of a block based on depth multiplier.
Use depth_coefficient of global_params.
Args:
repeats (int): num_repeat to be calculated.
global_params (namedtuple): Global params of the model.
Returns:
new repeat: New repeat number after calculating.
"""
multiplier = global_params.depth_coefficient
if not multiplier:
return repeats
# follow the formula transferred from official TensorFlow implementation
return int(math.ceil(multiplier * repeats))
def drop_connect(inputs, p, training):
"""Drop connect.
Args:
input (tensor: BCWH): Input of this structure.
p (float: 0.0~1.0): Probability of drop connection.
training (bool): The running mode.
Returns:
output: Output after drop connection.
"""
assert 0 <= p <= 1, 'p must be in range of [0,1]'
if not training:
return inputs
batch_size = inputs.shape[0]
keep_prob = 1 - p
# generate binary_tensor mask according to probability (p for 0, 1-p for 1)
random_tensor = keep_prob
random_tensor += torch.rand([batch_size, 1, 1, 1], dtype=inputs.dtype, device=inputs.device)
binary_tensor = torch.floor(random_tensor)
output = inputs / keep_prob * binary_tensor
return output
def get_width_and_height_from_size(x):
"""Obtain height and width from x.
Args:
x (int, tuple or list): Data size.
Returns:
size: A tuple or list (H,W).
"""
if isinstance(x, int):
return x, x
if isinstance(x, list) or isinstance(x, tuple):
return x
else:
raise TypeError()
def calculate_output_image_size(input_image_size, stride):
"""Calculates the output image size when using Conv2dSamePadding with a stride.
Necessary for static padding. Thanks to mannatsingh for pointing this out.
Args:
input_image_size (int, tuple or list): Size of input image.
stride (int, tuple or list): Conv2d operation's stride.
Returns:
output_image_size: A list [H,W].
"""
if input_image_size is None:
return None
image_height, image_width = get_width_and_height_from_size(input_image_size)
stride = stride if isinstance(stride, int) else stride[0]
image_height = int(math.ceil(image_height / stride))
image_width = int(math.ceil(image_width / stride))
return [image_height, image_width]
# Note:
# The following 'SamePadding' functions make output size equal ceil(input size/stride).
# Only when stride equals 1, can the output size be the same as input size.
# Don't be confused by their function names ! ! !
def get_same_padding_conv2d(image_size=None):
"""Chooses static padding if you have specified an image size, and dynamic padding otherwise.
Static padding is necessary for ONNX exporting of models.
Args:
image_size (int or tuple): Size of the image.
Returns:
Conv2dDynamicSamePadding or Conv2dStaticSamePadding.
"""
if image_size is None:
return Conv2dDynamicSamePadding
else:
return partial(Conv2dStaticSamePadding, image_size=image_size)
class Conv2dDynamicSamePadding(nn.Conv2d):
"""2D Convolutions like TensorFlow, for a dynamic image size.
The padding is operated in forward function by calculating dynamically.
"""
# Tips for 'SAME' mode padding.
# Given the following:
# i: width or height
# s: stride
# k: kernel size
# d: dilation
# p: padding
# Output after Conv2d:
# o = floor((i+p-((k-1)*d+1))/s+1)
# If o equals i, i = floor((i+p-((k-1)*d+1))/s+1),
# => p = (i-1)*s+((k-1)*d+1)-i
def __init__(self, in_channels, out_channels, kernel_size, stride=1, dilation=1, groups=1, bias=True):
super().__init__(in_channels, out_channels, kernel_size, stride, 0, dilation, groups, bias)
self.stride = self.stride if len(self.stride) == 2 else [self.stride[0]] * 2
def forward(self, x):
ih, iw = x.size()[-2:]
kh, kw = self.weight.size()[-2:]
sh, sw = self.stride
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw) # change the output size according to stride ! ! !
pad_h = max((oh - 1) * self.stride[0] + (kh - 1) * self.dilation[0] + 1 - ih, 0)
pad_w = max((ow - 1) * self.stride[1] + (kw - 1) * self.dilation[1] + 1 - iw, 0)
if pad_h > 0 or pad_w > 0:
x = F.pad(x, [pad_w // 2, pad_w - pad_w // 2, pad_h // 2, pad_h - pad_h // 2])
return F.conv2d(x, self.weight, self.bias, self.stride, self.padding, self.dilation, self.groups)
class Conv2dStaticSamePadding(nn.Conv2d):
"""2D Convolutions like TensorFlow's 'SAME' mode, with the given input image size.
The padding mudule is calculated in construction function, then used in forward.
"""
# With the same calculation as Conv2dDynamicSamePadding
def __init__(self, in_channels, out_channels, kernel_size, stride=1, image_size=None, **kwargs):
super().__init__(in_channels, out_channels, kernel_size, stride, **kwargs)
self.stride = self.stride if len(self.stride) == 2 else [self.stride[0]] * 2
# Calculate padding based on image size and save it
assert image_size is not None
ih, iw = (image_size, image_size) if isinstance(image_size, int) else image_size
kh, kw = self.weight.size()[-2:]
sh, sw = self.stride
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw)
pad_h = max((oh - 1) * self.stride[0] + (kh - 1) * self.dilation[0] + 1 - ih, 0)
pad_w = max((ow - 1) * self.stride[1] + (kw - 1) * self.dilation[1] + 1 - iw, 0)
if pad_h > 0 or pad_w > 0:
self.static_padding = nn.ZeroPad2d((pad_w // 2, pad_w - pad_w // 2,
pad_h // 2, pad_h - pad_h // 2))
else:
self.static_padding = nn.Identity()
def forward(self, x):
x = self.static_padding(x)
x = F.conv2d(x, self.weight, self.bias, self.stride, self.padding, self.dilation, self.groups)
return x
def get_same_padding_maxPool2d(image_size=None):
"""Chooses static padding if you have specified an image size, and dynamic padding otherwise.
Static padding is necessary for ONNX exporting of models.
Args:
image_size (int or tuple): Size of the image.
Returns:
MaxPool2dDynamicSamePadding or MaxPool2dStaticSamePadding.
"""
if image_size is None:
return MaxPool2dDynamicSamePadding
else:
return partial(MaxPool2dStaticSamePadding, image_size=image_size)
class MaxPool2dDynamicSamePadding(nn.MaxPool2d):
"""2D MaxPooling like TensorFlow's 'SAME' mode, with a dynamic image size.
The padding is operated in forward function by calculating dynamically.
"""
def __init__(self, kernel_size, stride, padding=0, dilation=1, return_indices=False, ceil_mode=False):
super().__init__(kernel_size, stride, padding, dilation, return_indices, ceil_mode)
self.stride = [self.stride] * 2 if isinstance(self.stride, int) else self.stride
self.kernel_size = [self.kernel_size] * 2 if isinstance(self.kernel_size, int) else self.kernel_size
self.dilation = [self.dilation] * 2 if isinstance(self.dilation, int) else self.dilation
def forward(self, x):
ih, iw = x.size()[-2:]
kh, kw = self.kernel_size
sh, sw = self.stride
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw)
pad_h = max((oh - 1) * self.stride[0] + (kh - 1) * self.dilation[0] + 1 - ih, 0)
pad_w = max((ow - 1) * self.stride[1] + (kw - 1) * self.dilation[1] + 1 - iw, 0)
if pad_h > 0 or pad_w > 0:
x = F.pad(x, [pad_w // 2, pad_w - pad_w // 2, pad_h // 2, pad_h - pad_h // 2])
return F.max_pool2d(x, self.kernel_size, self.stride, self.padding,
self.dilation, self.ceil_mode, self.return_indices)
class MaxPool2dStaticSamePadding(nn.MaxPool2d):
"""2D MaxPooling like TensorFlow's 'SAME' mode, with the given input image size.
The padding mudule is calculated in construction function, then used in forward.
"""
def __init__(self, kernel_size, stride, image_size=None, **kwargs):
super().__init__(kernel_size, stride, **kwargs)
self.stride = [self.stride] * 2 if isinstance(self.stride, int) else self.stride
self.kernel_size = [self.kernel_size] * 2 if isinstance(self.kernel_size, int) else self.kernel_size
self.dilation = [self.dilation] * 2 if isinstance(self.dilation, int) else self.dilation
# Calculate padding based on image size and save it
assert image_size is not None
ih, iw = (image_size, image_size) if isinstance(image_size, int) else image_size
kh, kw = self.kernel_size
sh, sw = self.stride
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw)
pad_h = max((oh - 1) * self.stride[0] + (kh - 1) * self.dilation[0] + 1 - ih, 0)
pad_w = max((ow - 1) * self.stride[1] + (kw - 1) * self.dilation[1] + 1 - iw, 0)
if pad_h > 0 or pad_w > 0:
self.static_padding = nn.ZeroPad2d((pad_w // 2, pad_w - pad_w // 2, pad_h // 2, pad_h - pad_h // 2))
else:
self.static_padding = nn.Identity()
def forward(self, x):
x = self.static_padding(x)
x = F.max_pool2d(x, self.kernel_size, self.stride, self.padding,
self.dilation, self.ceil_mode, self.return_indices)
return x
################################################################################
# Helper functions for loading model params
################################################################################
# BlockDecoder: A Class for encoding and decoding BlockArgs
# efficientnet_params: A function to query compound coefficient
# get_model_params and efficientnet:
# Functions to get BlockArgs and GlobalParams for efficientnet
# url_map and url_map_advprop: Dicts of url_map for pretrained weights
# load_pretrained_weights: A function to load pretrained weights
class BlockDecoder(object):
"""Block Decoder for readability,
straight from the official TensorFlow repository.
"""
@staticmethod
def _decode_block_string(block_string):
"""Get a block through a string notation of arguments.
Args:
block_string (str): A string notation of arguments.
Examples: 'r1_k3_s11_e1_i32_o16_se0.25_noskip'.
Returns:
BlockArgs: The namedtuple defined at the top of this file.
"""
assert isinstance(block_string, str)
ops = block_string.split('_')
options = {}
for op in ops:
splits = re.split(r'(\d.*)', op)
if len(splits) >= 2:
key, value = splits[:2]
options[key] = value
# Check stride
assert (('s' in options and len(options['s']) == 1) or
(len(options['s']) == 2 and options['s'][0] == options['s'][1]))
return BlockArgs(
num_repeat=int(options['r']),
kernel_size=int(options['k']),
stride=[int(options['s'][0])],
expand_ratio=int(options['e']),
input_filters=int(options['i']),
output_filters=int(options['o']),
se_ratio=float(options['se']) if 'se' in options else None,
id_skip=('noskip' not in block_string))
@staticmethod
def _encode_block_string(block):
"""Encode a block to a string.
Args:
block (namedtuple): A BlockArgs type argument.
Returns:
block_string: A String form of BlockArgs.
"""
args = [
'r%d' % block.num_repeat,
'k%d' % block.kernel_size,
's%d%d' % (block.strides[0], block.strides[1]),
'e%s' % block.expand_ratio,
'i%d' % block.input_filters,
'o%d' % block.output_filters
]
if 0 < block.se_ratio <= 1:
args.append('se%s' % block.se_ratio)
if block.id_skip is False:
args.append('noskip')
return '_'.join(args)
@staticmethod
def decode(string_list):
"""Decode a list of string notations to specify blocks inside the network.
Args:
string_list (list[str]): A list of strings, each string is a notation of block.
Returns:
blocks_args: A list of BlockArgs namedtuples of block args.
"""
assert isinstance(string_list, list)
blocks_args = []
for block_string in string_list:
blocks_args.append(BlockDecoder._decode_block_string(block_string))
return blocks_args
@staticmethod
def encode(blocks_args):
"""Encode a list of BlockArgs to a list of strings.
Args:
blocks_args (list[namedtuples]): A list of BlockArgs namedtuples of block args.
Returns:
block_strings: A list of strings, each string is a notation of block.
"""
block_strings = []
for block in blocks_args:
block_strings.append(BlockDecoder._encode_block_string(block))
return block_strings
def efficientnet_params(model_name):
"""Map EfficientNet model name to parameter coefficients.
Args:
model_name (str): Model name to be queried.
Returns:
params_dict[model_name]: A (width,depth,res,dropout) tuple.
"""
params_dict = {
# Coefficients: width,depth,res,dropout
'efficientnet-b0': (1.0, 1.0, 224, 0.2),
'efficientnet-b1': (1.0, 1.1, 240, 0.2),
'efficientnet-b2': (1.1, 1.2, 260, 0.3),
'efficientnet-b3': (1.2, 1.4, 300, 0.3),
'efficientnet-b4': (1.4, 1.8, 380, 0.4),
'efficientnet-b5': (1.6, 2.2, 456, 0.4),
'efficientnet-b6': (1.8, 2.6, 528, 0.5),
'efficientnet-b7': (2.0, 3.1, 600, 0.5),
'efficientnet-b8': (2.2, 3.6, 672, 0.5),
'efficientnet-l2': (4.3, 5.3, 800, 0.5),
}
return params_dict[model_name]
def efficientnet(width_coefficient=None, depth_coefficient=None, image_size=None,
dropout_rate=0.2, drop_connect_rate=0.2, num_classes=1000, include_top=True):
"""Create BlockArgs and GlobalParams for efficientnet model.
Args:
width_coefficient (float)
depth_coefficient (float)
image_size (int)
dropout_rate (float)
drop_connect_rate (float)
num_classes (int)
Meaning as the name suggests.
Returns:
blocks_args, global_params.
"""
# Blocks args for the whole model(efficientnet-b0 by default)
# It will be modified in the construction of EfficientNet Class according to model
blocks_args = [
'r1_k3_s11_e1_i32_o16_se0.25',
'r2_k3_s22_e6_i16_o24_se0.25',
'r2_k5_s22_e6_i24_o40_se0.25',
'r3_k3_s22_e6_i40_o80_se0.25',
'r3_k5_s11_e6_i80_o112_se0.25',
'r4_k5_s22_e6_i112_o192_se0.25',
'r1_k3_s11_e6_i192_o320_se0.25',
]
blocks_args = BlockDecoder.decode(blocks_args)
global_params = GlobalParams(
width_coefficient=width_coefficient,
depth_coefficient=depth_coefficient,
image_size=image_size,
dropout_rate=dropout_rate,
num_classes=num_classes,
batch_norm_momentum=0.99,
batch_norm_epsilon=1e-3,
drop_connect_rate=drop_connect_rate,
depth_divisor=8,
min_depth=None,
include_top=include_top,
)
return blocks_args, global_params
def get_model_params(model_name, override_params):
"""Get the block args and global params for a given model name.
Args:
model_name (str): Model's name.
override_params (dict): A dict to modify global_params.
Returns:
blocks_args, global_params
"""
if model_name.startswith('efficientnet'):
w, d, s, p = efficientnet_params(model_name)
# note: all models have drop connect rate = 0.2
blocks_args, global_params = efficientnet(
width_coefficient=w, depth_coefficient=d, dropout_rate=p, image_size=s)
else:
raise NotImplementedError('model name is not pre-defined: {}'.format(model_name))
if override_params:
# ValueError will be raised here if override_params has fields not included in global_params.
global_params = global_params._replace(**override_params)
return blocks_args, global_params
# train with Standard methods
# check more details in paper(EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks)
url_map = {
'efficientnet-b0': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b0-355c32eb.pth',
'efficientnet-b1': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b1-f1951068.pth',
'efficientnet-b2': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b2-8bb594d6.pth',
'efficientnet-b3': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b3-5fb5a3c3.pth',
'efficientnet-b4': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b4-6ed6700e.pth',
'efficientnet-b5': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b5-b6417697.pth',
'efficientnet-b6': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b6-c76e70fd.pth',
'efficientnet-b7': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b7-dcc49843.pth',
}
# train with Adversarial Examples(AdvProp)
# check more details in paper(Adversarial Examples Improve Image Recognition)
url_map_advprop = {
'efficientnet-b0': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b0-b64d5a18.pth',
'efficientnet-b1': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b1-0f3ce85a.pth',
'efficientnet-b2': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b2-6e9d97e5.pth',
'efficientnet-b3': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b3-cdd7c0f4.pth',
'efficientnet-b4': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b4-44fb3a87.pth',
'efficientnet-b5': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b5-86493f6b.pth',
'efficientnet-b6': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b6-ac80338e.pth',
'efficientnet-b7': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b7-4652b6dd.pth',
'efficientnet-b8': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b8-22a8fe65.pth',
}
# TODO: add the petrained weights url map of 'efficientnet-l2'
def load_pretrained_weights(model, model_name, weights_path=None, load_fc=True, advprop=False, verbose=True):
"""Loads pretrained weights from weights path or download using url.
Args:
model (Module): The whole model of efficientnet.
model_name (str): Model name of efficientnet.
weights_path (None or str):
str: path to pretrained weights file on the local disk.
None: use pretrained weights downloaded from the Internet.
load_fc (bool): Whether to load pretrained weights for fc layer at the end of the model.
advprop (bool): Whether to load pretrained weights
trained with advprop (valid when weights_path is None).
"""
if isinstance(weights_path, str):
state_dict = torch.load(weights_path)
else:
# AutoAugment or Advprop (different preprocessing)
url_map_ = url_map_advprop if advprop else url_map
state_dict = model_zoo.load_url(url_map_[model_name])
if load_fc:
ret = model.load_state_dict(state_dict, strict=False)
assert not ret.missing_keys, 'Missing keys when loading pretrained weights: {}'.format(ret.missing_keys)
else:
state_dict.pop('_fc.weight')
state_dict.pop('_fc.bias')
ret = model.load_state_dict(state_dict, strict=False)
assert set(ret.missing_keys) == set(
['_fc.weight', '_fc.bias']), 'Missing keys when loading pretrained weights: {}'.format(ret.missing_keys)
assert not ret.unexpected_keys, 'Missing keys when loading pretrained weights: {}'.format(ret.unexpected_keys)
if verbose:
print('Loaded pretrained weights for {}'.format(model_name))
VALID_MODELS = (
'efficientnet-b0', 'efficientnet-b1', 'efficientnet-b2', 'efficientnet-b3',
'efficientnet-b4', 'efficientnet-b5', 'efficientnet-b6', 'efficientnet-b7',
'efficientnet-b8',
# Support the construction of 'efficientnet-l2' without pretrained weights
'efficientnet-l2'
)
class MBConvBlock(nn.Module):
"""Mobile Inverted Residual Bottleneck Block.
Args:
block_args (namedtuple): BlockArgs, defined in utils.py.
global_params (namedtuple): GlobalParam, defined in utils.py.
image_size (tuple or list): [image_height, image_width].
References:
[1] https://arxiv.org/abs/1704.04861 (MobileNet v1)
[2] https://arxiv.org/abs/1801.04381 (MobileNet v2)
[3] https://arxiv.org/abs/1905.02244 (MobileNet v3)
"""
def __init__(self, block_args, global_params, image_size=None):
super().__init__()
self._block_args = block_args
self._bn_mom = 1 - global_params.batch_norm_momentum # pytorch's difference from tensorflow
self._bn_eps = global_params.batch_norm_epsilon
self.has_se = (self._block_args.se_ratio is not None) and (0 < self._block_args.se_ratio <= 1)
self.id_skip = block_args.id_skip # whether to use skip connection and drop connect
# Expansion phase (Inverted Bottleneck)
inp = self._block_args.input_filters # number of input channels
oup = self._block_args.input_filters * self._block_args.expand_ratio # number of output channels
if self._block_args.expand_ratio != 1:
Conv2d = get_same_padding_conv2d(image_size=image_size)
self._expand_conv = Conv2d(in_channels=inp, out_channels=oup, kernel_size=1, bias=False)
self._bn0 = nn.BatchNorm2d(num_features=oup, momentum=self._bn_mom, eps=self._bn_eps)
# image_size = calculate_output_image_size(image_size, 1) <-- this wouldn't modify image_size
# Depthwise convolution phase
k = self._block_args.kernel_size
s = self._block_args.stride
Conv2d = get_same_padding_conv2d(image_size=image_size)
self._depthwise_conv = Conv2d(
in_channels=oup, out_channels=oup, groups=oup, # groups makes it depthwise
kernel_size=k, stride=s, bias=False)
self._bn1 = nn.BatchNorm2d(num_features=oup, momentum=self._bn_mom, eps=self._bn_eps)
image_size = calculate_output_image_size(image_size, s)
# Squeeze and Excitation layer, if desired
if self.has_se:
Conv2d = get_same_padding_conv2d(image_size=(1, 1))
num_squeezed_channels = max(1, int(self._block_args.input_filters * self._block_args.se_ratio))
self._se_reduce = Conv2d(in_channels=oup, out_channels=num_squeezed_channels, kernel_size=1)
self._se_expand = Conv2d(in_channels=num_squeezed_channels, out_channels=oup, kernel_size=1)
# Pointwise convolution phase
final_oup = self._block_args.output_filters
Conv2d = get_same_padding_conv2d(image_size=image_size)
self._project_conv = Conv2d(in_channels=oup, out_channels=final_oup, kernel_size=1, bias=False)
self._bn2 = nn.BatchNorm2d(num_features=final_oup, momentum=self._bn_mom, eps=self._bn_eps)
self._swish = MemoryEfficientSwish()
def forward(self, inputs, drop_connect_rate=None):
"""MBConvBlock's forward function.
Args:
inputs (tensor): Input tensor.
drop_connect_rate (bool): Drop connect rate (float, between 0 and 1).
Returns:
Output of this block after processing.
"""
# Expansion and Depthwise Convolution
x = inputs
if self._block_args.expand_ratio != 1:
x = self._expand_conv(inputs)
x = self._bn0(x)
x = self._swish(x)
x = self._depthwise_conv(x)
x = self._bn1(x)
x = self._swish(x)
# Squeeze and Excitation
if self.has_se:
x_squeezed = F.adaptive_avg_pool2d(x, 1)
x_squeezed = self._se_reduce(x_squeezed)
x_squeezed = self._swish(x_squeezed)
x_squeezed = self._se_expand(x_squeezed)
x = torch.sigmoid(x_squeezed) * x
# Pointwise Convolution
x = self._project_conv(x)
x = self._bn2(x)
# Skip connection and drop connect
input_filters, output_filters = self._block_args.input_filters, self._block_args.output_filters
if self.id_skip and self._block_args.stride == 1 and input_filters == output_filters:
# The combination of skip connection and drop connect brings about stochastic depth.
if drop_connect_rate:
x = drop_connect(x, p=drop_connect_rate, training=self.training)
x = x + inputs # skip connection
return x
def set_swish(self, memory_efficient=True):
"""Sets swish function as memory efficient (for training) or standard (for export).
Args:
memory_efficient (bool): Whether to use memory-efficient version of swish.
"""
self._swish = MemoryEfficientSwish() if memory_efficient else Swish()
class EfficientNet(nn.Module):
def __init__(self, blocks_args=None, global_params=None):
super().__init__()
assert isinstance(blocks_args, list), 'blocks_args should be a list'
assert len(blocks_args) > 0, 'block args must be greater than 0'
self._global_params = global_params
self._blocks_args = blocks_args
# Batch norm parameters
bn_mom = 1 - self._global_params.batch_norm_momentum
bn_eps = self._global_params.batch_norm_epsilon
# Get stem static or dynamic convolution depending on image size
image_size = global_params.image_size
Conv2d = get_same_padding_conv2d(image_size=image_size)
# Stem
in_channels = 3 # rgb
out_channels = round_filters(32, self._global_params) # number of output channels
self._conv_stem = Conv2d(in_channels, out_channels, kernel_size=3, stride=2, bias=False)
self._bn0 = nn.BatchNorm2d(num_features=out_channels, momentum=bn_mom, eps=bn_eps)
image_size = calculate_output_image_size(image_size, 2)
# Build blocks
self._blocks = nn.ModuleList([])
for block_args in self._blocks_args:
# Update block input and output filters based on depth multiplier.
block_args = block_args._replace(
input_filters=round_filters(block_args.input_filters, self._global_params),
output_filters=round_filters(block_args.output_filters, self._global_params),
num_repeat=round_repeats(block_args.num_repeat, self._global_params)
)
# The first block needs to take care of stride and filter size increase.
self._blocks.append(MBConvBlock(block_args, self._global_params, image_size=image_size))
image_size = calculate_output_image_size(image_size, block_args.stride)
if block_args.num_repeat > 1: # modify block_args to keep same output size
block_args = block_args._replace(input_filters=block_args.output_filters, stride=1)
for _ in range(block_args.num_repeat - 1):
self._blocks.append(MBConvBlock(block_args, self._global_params, image_size=image_size))
# image_size = calculate_output_image_size(image_size, block_args.stride) # stride = 1
# Head
in_channels = block_args.output_filters # output of final block
out_channels = round_filters(1280, self._global_params)
Conv2d = get_same_padding_conv2d(image_size=image_size)
self._conv_head = Conv2d(in_channels, out_channels, kernel_size=1, bias=False)
self._bn1 = nn.BatchNorm2d(num_features=out_channels, momentum=bn_mom, eps=bn_eps)
# Final linear layer
self._avg_pooling = nn.AdaptiveAvgPool2d(1)
if self._global_params.include_top:
self._dropout = nn.Dropout(self._global_params.dropout_rate)
self._fc = nn.Linear(out_channels, self._global_params.num_classes)
# set activation to memory efficient swish by default
self._swish = MemoryEfficientSwish()
self.width_list = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def set_swish(self, memory_efficient=True):
"""Sets swish function as memory efficient (for training) or standard (for export).
Args:
memory_efficient (bool): Whether to use memory-efficient version of swish.
"""
self._swish = MemoryEfficientSwish() if memory_efficient else Swish()
for block in self._blocks:
block.set_swish(memory_efficient)
def extract_endpoints(self, inputs):
# """Use convolution layer to extract features
# from reduction levels i in [1, 2, 3, 4, 5].
#
# Args:
# inputs (tensor): Input tensor.
#
# Returns:
# Dictionary of last intermediate features
# with reduction levels i in [1, 2, 3, 4, 5].
# Example:
# >>> import torch
# >>> from efficientnet.model import EfficientNet
# >>> inputs = torch.rand(1, 3, 224, 224)
# >>> model = EfficientNet.from_pretrained('efficientnet-b0')
# >>> endpoints = model.extract_endpoints(inputs)
# >>> print(endpoints['reduction_1'].shape) # torch.Size([1, 16, 112, 112])
# >>> print(endpoints['reduction_2'].shape) # torch.Size([1, 24, 56, 56])
# >>> print(endpoints['reduction_3'].shape) # torch.Size([1, 40, 28, 28])
# >>> print(endpoints['reduction_4'].shape) # torch.Size([1, 112, 14, 14])
# >>> print(endpoints['reduction_5'].shape) # torch.Size([1, 320, 7, 7])
# >>> print(endpoints['reduction_6'].shape) # torch.Size([1, 1280, 7, 7])
# """
endpoints = dict()
# Stem
x = self._swish(self._bn0(self._conv_stem(inputs)))
prev_x = x
# Blocks
for idx, block in enumerate(self._blocks):
drop_connect_rate = self._global_params.drop_connect_rate
if drop_connect_rate:
drop_connect_rate *= float(idx) / len(self._blocks) # scale drop connect_rate
x = block(x, drop_connect_rate=drop_connect_rate)
if prev_x.size(2) > x.size(2):
endpoints['reduction_{}'.format(len(endpoints) + 1)] = prev_x
elif idx == len(self._blocks) - 1:
endpoints['reduction_{}'.format(len(endpoints) + 1)] = x
prev_x = x
# Head
x = self._swish(self._bn1(self._conv_head(x)))
endpoints['reduction_{}'.format(len(endpoints) + 1)] = x
return endpoints
def forward(self, inputs):
"""use convolution layer to extract feature .
Args:
inputs (tensor): Input tensor.
Returns:
Output of the final convolution
layer in the efficientnet model.
"""
# Stem
x = self._swish(self._bn0(self._conv_stem(inputs)))
unique_tensors = {}
# Blocks
for idx, block in enumerate(self._blocks):
drop_connect_rate = self._global_params.drop_connect_rate
if drop_connect_rate:
drop_connect_rate *= float(idx) / len(self._blocks) # scale drop connect_rate
x = block(x, drop_connect_rate=drop_connect_rate)
width, height = x.shape[2], x.shape[3]
unique_tensors[(width, height)] = x
result_list = list(unique_tensors.values())[-4:]
# Head
return result_list
@classmethod
def from_name(cls, model_name, in_channels=3, **override_params):
"""Create an efficientnet model according to name.
Args:
model_name (str): Name for efficientnet.
in_channels (int): Input data's channel number.
override_params (other key word params):
Params to override model's global_params.
Optional key:
'width_coefficient', 'depth_coefficient',
'image_size', 'dropout_rate',
'num_classes', 'batch_norm_momentum',
'batch_norm_epsilon', 'drop_connect_rate',
'depth_divisor', 'min_depth'
Returns:
An efficientnet model.
"""
cls._check_model_name_is_valid(model_name)
blocks_args, global_params = get_model_params(model_name, override_params)
model = cls(blocks_args, global_params)
model._change_in_channels(in_channels)
return model
@classmethod
def from_pretrained(cls, model_name, weights_path=None, advprop=False,
in_channels=3, num_classes=1000, **override_params):
"""Create an efficientnet model according to name.
Args:
model_name (str): Name for efficientnet.
weights_path (None or str):
str: path to pretrained weights file on the local disk.
None: use pretrained weights downloaded from the Internet.
advprop (bool):
Whether to load pretrained weights
trained with advprop (valid when weights_path is None).
in_channels (int): Input data's channel number.
num_classes (int):
Number of categories for classification.
It controls the output size for final linear layer.
override_params (other key word params):
Params to override model's global_params.
Optional key:
'width_coefficient', 'depth_coefficient',
'image_size', 'dropout_rate',
'batch_norm_momentum',
'batch_norm_epsilon', 'drop_connect_rate',
'depth_divisor', 'min_depth'
Returns:
A pretrained efficientnet model.
"""
model = cls.from_name(model_name, num_classes=num_classes, **override_params)
load_pretrained_weights(model, model_name, weights_path=weights_path,
load_fc=(num_classes == 1000), advprop=advprop)
model._change_in_channels(in_channels)
return model
@classmethod
def get_image_size(cls, model_name):
"""Get the input image size for a given efficientnet model.
Args:
model_name (str): Name for efficientnet.
Returns:
Input image size (resolution).
"""
cls._check_model_name_is_valid(model_name)
_, _, res, _ = efficientnet_params(model_name)
return res
@classmethod
def _check_model_name_is_valid(cls, model_name):
"""Validates model name.
Args:
model_name (str): Name for efficientnet.
Returns:
bool: Is a valid name or not.
"""
if model_name not in VALID_MODELS:
raise ValueError('model_name should be one of: ' + ', '.join(VALID_MODELS))
def _change_in_channels(self, in_channels):
"""Adjust model's first convolution layer to in_channels, if in_channels not equals 3.
Args:
in_channels (int): Input data's channel number.
"""
if in_channels != 3:
Conv2d = get_same_padding_conv2d(image_size=self._global_params.image_size)
out_channels = round_filters(32, self._global_params)
self._conv_stem = Conv2d(in_channels, out_channels, kernel_size=3, stride=2, bias=False)
def efficient(model_name='efficientnet-b0', pretrained=False):
if pretrained:
model = EfficientNet.from_pretrained('{}'.format(model_name))
else:
model = EfficientNet.from_name('{}'.format(model_name))
return model
if __name__ == "__main__":
# VALID_MODELS = (
# 'efficientnet-b0', 'efficientnet-b1', 'efficientnet-b2', 'efficientnet-b3',
# 'efficientnet-b4', 'efficientnet-b5', 'efficientnet-b6', 'efficientnet-b7',
# 'efficientnet-b8',
# # Support the construction of 'efficientnet-l2' without pretrained weights
# 'efficientnet-l2'
# )
# Generating Sample image
image_size = (1, 3, 640, 640)
image = torch.rand(*image_size)
# Model
model = efficient('efficientnet-b0')
out = model(image)
print(len(out))四、手把手教你添加EfficientNetV1机制
这个主干的网络结构添加起来算是所有的改进机制里最麻烦的了,因为有一些网略结构可以用yaml文件搭建出来,有一些网络结构其中的一些细节根本没有办法用yaml文件去搭建,用yaml文件去搭建会损失一些细节部分(而且一个网络结构设计很多细节的结构修改方式都不一样,一个一个去修改大家难免会出错),所以这里让网络直接返回整个网络,然后修改部分 yolo代码以后就都以这种形式添加了,以后我提出的网络模型基本上都会通过这种方式修改,我也会进行一些模型细节改进。创新出新的网络结构大家直接拿来用就可以的。下面开始添加教程->
(同时每一个后面都有代码,大家拿来复制粘贴替换即可,但是要看好了不要复制粘贴替换多了)
修改一
我们复制网络结构代码到“ultralytics/nn/modules”目录下创建一个py文件复制粘贴进去 ,我这里起的名字是EfficientNetV1
修改二
找到如下的文件"ultralytics/nn/tasks.py" 在开始的部分导入我们的模型如下图。
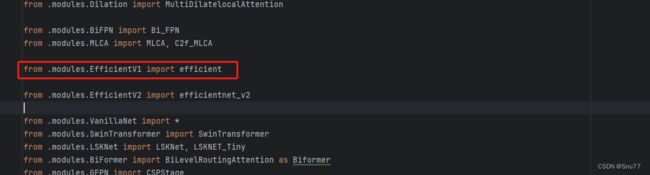
from .modules.EfficientV1 import efficient修改三
添加如下两行代码!!!

修改四
找到七百多行大概把具体看图片,按照图片来修改就行,添加红框内的部分,注意没有()只是函数名,我这里只添加了部分的版本,大家有兴趣这个EfficientNetV1还有更多的版本可以添加,看我给的代码函数头即可。
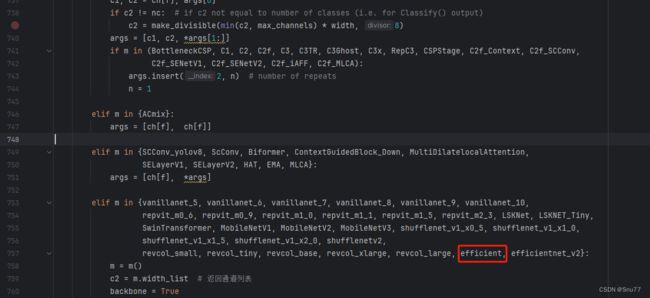
elif m in {自行添加对应的模型即可,下面都是一样的}:
m = m()
c2 = m.width_list # 返回通道列表
backbone = True修改五
下面的两个红框内都是需要改动的。
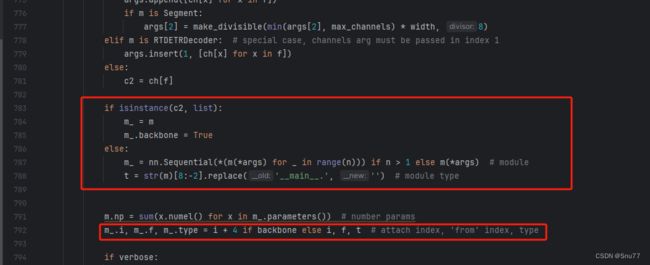
if isinstance(c2, list):
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
m.np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type = i + 4 if backbone else i, f, t # attach index, 'from' index, type修改六
如下的也需要修改,全部按照我的来。
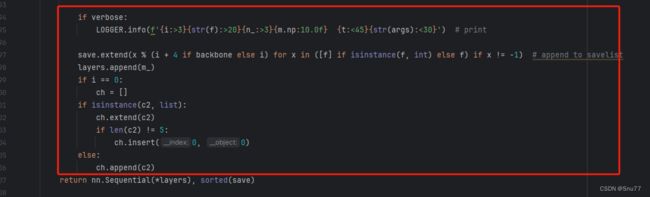
代码如下把原先的代码替换了即可。
if verbose:
LOGGER.info(f'{i:>3}{str(f):>20}{n_:>3}{m.np:10.0f} {t:<45}{str(args):<30}') # print
save.extend(x % (i + 4 if backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
if len(c2) != 5:
ch.insert(0, 0)
else:
ch.append(c2)修改七
修改七和前面的都不太一样,需要修改前向传播中的一个部分, 已经离开了parse_model方法了。
可以在图片中开代码行数,没有离开task.py文件都是同一个文件。 同时这个部分有好几个前向传播都很相似,大家不要看错了,是70多行左右的!!!,同时我后面提供了代码,大家直接复制粘贴即可,有时间我针对这里会出一个视频。

代码如下->
def _predict_once(self, x, profile=False, visualize=False):
"""
Perform a forward pass through the network.
Args:
x (torch.Tensor): The input tensor to the model.
profile (bool): Print the computation time of each layer if True, defaults to False.
visualize (bool): Save the feature maps of the model if True, defaults to False.
Returns:
(torch.Tensor): The last output of the model.
"""
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
if len(x) != 5: # 0 - 5
x.insert(0, None)
for index, i in enumerate(x):
if index in self.save:
y.append(i)
else:
y.append(None)
x = x[-1] # 最后一个输出传给下一层
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x到这里就完成了修改部分,但是这里面细节很多,大家千万要注意不要替换多余的代码,导致报错,也不要拉下任何一部,都会导致运行失败,而且报错很难排查!!!很难排查!!!
修改八
我们找到如下文件'ultralytics/utils/torch_utils.py'按照如下的图片进行修改,否则容易打印不出来计算量。

五、EfficientNetV1的yaml文件
复制如下yaml文件进行运行!!!
# Ultralytics YOLO , AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOP
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, efficient, []] # 4
- [-1, 1, SPPF, [1024, 5]] # 5
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 6
- [[-1, 3], 1, Concat, [1]] # 7 cat backbone P4
- [-1, 3, C2f, [512]] # 8
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 9
- [[-1, 2], 1, Concat, [1]] # 10 cat backbone P3
- [-1, 3, C2f, [256]] # 11 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]] # 12
- [[-1, 8], 1, Concat, [1]] # 13 cat head P4
- [-1, 3, C2f, [512]] # 14 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]] # 15
- [[-1, 5], 1, Concat, [1]] # 16 cat head P5
- [-1, 3, C2f, [1024]] # 17 (P5/32-large)
- [[11, 14, 17], 1, Detect, [nc]] # Detect(P3, P4, P5)
六、成功运行记录
下面是成功运行的截图,已经完成了有1个epochs的训练,图片太大截不全第2个epochs了。

七、本文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv8改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,目前本专栏免费阅读(暂时,大家尽早关注不迷路~),如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
专栏回顾:YOLOv8改进系列专栏——本专栏持续复习各种顶会内容——科研必备
