进程和线程详解
1. 进程相关概念
进程是一个程序的一次执行的过程
每一个进程都分配一个虚拟的4G内存
32位 0-4G 64位0-8G
0-3G : 用户空间
3G-4G : 内核空间
1.1 进程和程序的区别
程序:存放在硬盘上的指令和命令的有序集合,是静态的;
程序的组成:代码段、用户数据段(静态区、全局变量、malloc开辟的空间)<<<程序运行之前
进程:程序的一次执行过程(创建、调度、消亡),是动态的;
进程的组成:代码段、用户数据段、系统数据段(进程控制块(pcb)、pc寄存器、堆栈)
进程控制块(pcb):
进程ID号---PID;
用户信息(用户名和用户组名);
进程状态(ctrl c结束;ctrl z暂停挂起,用信号进行唤醒);
优先级(优先级值越小,等级越高,抢占cpu效率越高);
文件描述符表(进程运行结束时,系统会自动关闭文件描述符表中的文件);
pc寄存器(程序计数器):
存放程序下一条指令的地址;
堆栈---栈:
每个进程都有自己的栈,进程运行时才会开辟;
进程是系统资源管理的最小单位;
1.2 进程相关指令
ps -ef:显示系统中正在运行的进程;
UID:用户名
PPID:父进程号
TTY:终端运行程序,包括守护进程
ps aux:显示系统中正在运行的进程详细信息(包含运行状态);
STAT:进程状态
S睡眠状态
R运行状态
+前台进程(终端可以看见)
top:动态显示系统中正在运行的进程;
1.3 进程的类型
1.3.1 交互进程
(与shell终端相关,可以输入可以输出,既可以在前台运行,也可以在后台运行)
结束进程:kill
kill -l : 查看信号种类
kill -9 PID : 杀死进程
getpid(); //得到当前进程pid号
1.3.2 批处理进程(运维)
将一系列进程放在一个工作队列中,按顺序执行。
1.3.3 守护进程
跟终端无关,一直在后台运行,一般服务器会选择守护进程实现。
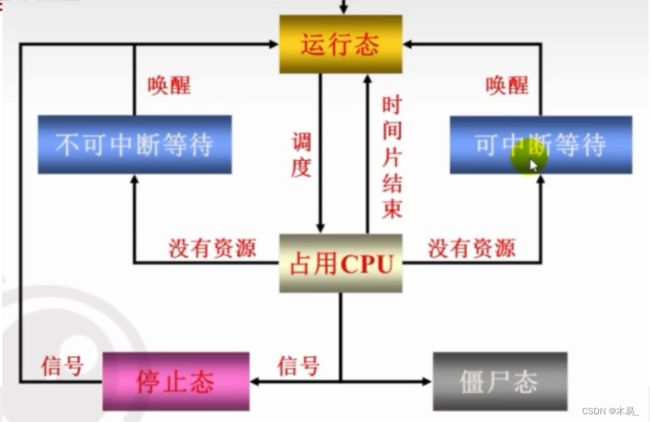
1.4 进程的运行状态
1、R—运行态:正在运行的程序或者准备运行的程序;
2、等待态:等待某种资源或者等待资源调度;
分为可中端和不可中断;
区别在于是否能被信号打端;
S---可中断等待态:如果进程收到信号会醒来
D---不可中断等待态:如果进程收到信号不会醒来
3、T—暂停态:暂停运行,需要使用某种信号将正在暂停的进程唤醒;
4、Z—死亡态(僵尸态):进程结束后,没有主动回收资源,就会进入僵尸态;
1.5 优先级(NI)
优先级决定了进程执行的先后顺序;
通过指令top可以查看优先级,NI表示进程的优先级;
优先级的取值范围:-20~19 默认优先级为0
NI值越小的优先级越高
修改优先级指令
修改准备运行的进程优先级
nice -n 指定优先级 ./a.out
nice -n 2 ./a.out//普通用户只能修改0-19
sudo nice -n -2 ./a.out
修改正在运行的进程优先级
renice -n 指定优先级 进程PID
1.6 前后台进程切换
./a.out & 进程后台运行;
ctrl + z:将正在运行的前台进程在后台挂起 — 处于暂停态;
bg + 任务号:将后台挂起的指定进程唤醒;(jobs可以在终端显示任务号)
fg + 任务号:将运行的后台放在前台运行。
1.7 进程相关的函数
1、创建进程—fork()
#include 示例
pid_t pid = fork();
//pid t = pid;
//pid = fork();
if(pid < 0)
{
perror("fork");
}
fork();//会创建4个进程
//子进程执行
if(pid == 0)
{
printf("pid = %d\n",getpid());//获取pid号
}
else//父进程执行
{
fork()//会创建3个进程
}
一般来说父进程先运行(不绝对)
2、父子进程
返回值、形参—左值 &—引用 右值—&—取地址
c++ 默认禁止临时变量产生
子进程会拷贝父进程的几乎所有数据,是相互独立的地址空间;
写操作时拷贝:通过允许父子进程可访问相同的物理内存从而伪装了对进程地址空间的真实拷贝,当子进程需要改变内存中数据时才拷贝父进程。
父进程先于子进程结束:
子进程变成孤儿进程,由前台变为后台进程,统一由init(1号进程)进程收养;
子进程先于父进程结束
子进程结束后,一般父进程结束时对子进程进行自动回收,如果没有回收,则子进程变为僵尸进程;
子进程执行时机:fork函数的下一个语句;
3、结束进程 exit()/_exit()
exit()
#include _exit()
#include 4、等待回收子进程 wait()/waitpid()
wait()
#include 举例:
#include 二、进程
1、exec函数族
在一个进程中调用另外的进程
list:列表;
p:PATH;
#include 2、守护进程
在后台一直运行,周期性地等待某些事件,与终端无关,一般用于服务器;
创建父进程,fork子进程,退出父进程,子进程就为守护进程;
进程组:创建一个进程时,就有一个进程组;跟创建进程具有亲缘关系地进程都属于该组
会话:打开一个终端时,就创建一个会话,会话由一个或者多个进程组组成;
守护进程创建流程:
1、创建一个子进程,父进程退出 — fork();
2、脱离原本会话 — setsid();
3、更改工作路径(可省略)为 /temp — chdir(/temp) //更改文件路径;
4、修改文件权限掩码(可省略) — umask();
文件权限掩码:指屏蔽掉文件权限中的对应位。例如,有个文件权限掩码为050,它就屏蔽掉了文件组拥有者的可读与可执行权限。由于 fork创建的子进程继承了父进程的文件掩码,这给子进程使用文件带来了麻烦,因此将文件掩码设置为0(即不屏蔽任何权限)可以增强守护进程的灵活性
5、关闭所有的文件描述符 — getdtablesize() //获取文件描述符最大值;
while(1)
{
周期性执行的代码;
}
练习:
创建一个守护进程,每隔1s向xx.log日志文件中写入当前时间工作路径设置为 /tmp
#include 三、线程
1、线程基础
多进程的实现
程序在内存上运行,数据在虚拟内存上,与物理内存存在映射关系;
//34位操作系统4G虚拟内存,指针4字节;64位有8G,指针8字节;
//每个进程都有虚拟内存空间;
//系统为每个进程创建一个task struct来描述该进程,该结构体中包含了一个指针,指向该进程的虚拟地址空间映射表;
//每个进程都可以用 task struct + 8G虚拟内存来表示;
CPU与cache高速缓存进行数据交互,效率比直接从内存中读取数据要快很多;
进程的物理地址相互独立,在进行进程切换时,cache高速缓冲区需要频繁刷新,消耗资源巨大;
轻量级进程 — 线程:必须通过进程创建;
线程是最小的任务调度单位;
多线程的实现
多个线程共享同一个地址空间,减少cache刷新频率;
如果创建线程的进程提前结束,那么进程创建的所有线程
查看线程指令:ps -eLf --- LWP线程号
一个进程中的多个线程共享以下资源
1、可执行的指令
2、静态数据(全局变量,static修饰变量)
静态全局区:全局变量,static修饰变量;
栈区:局部变量,函数参数返回值;
//进程间的数据交互只能在内核空间来实现
3、进程中打开的文件描述符
4、信号处理函数
5、当前工作目录
6、用户ID与用户组ID
线程间私有的数据
1、线程ID
2、PC
3、状态、优先级
4、堆栈 == 栈
2、线程相关接口函数
1.创建线程 – pthread_create()
#include 必须链接库函数 gcc 1.c -pthread
include <stdio.h>
#include 需要传递多个参数时,封装为结构体,把结构体的地址传递进来即可;
#include 2、退出线程 — pthread_exit()
#include #include 3、线程相关函数接口
1.等待线程 — pthread_join
#include #include 三、线程间通信
一个进程创建的多个线程之间有共享地址空间 — 全局变量 — 可以使用全局变量实现线程间通信;
线程在使用全局数据时,有可能其他线程也在访问该数据,就有可能造成原本数据的破坏;
1、同步
多个线程按约定好的顺序,先后执行;
同步引入信号量来达成;
信号量相当于系统的一种资源,是一个非负整数,值为0表示没有资源,大于0表示有资源;
信号量不能直接访问,必须通过指定的函数接口来完成
1.信号量的初始化 sem_init()
创建一个信号量,给信号量赋初值;
#include 2.p操作 sem_wait()
申请资源,如果没有资源就原地阻塞;
#include if(是否有资源)
{
执行程序;
信号量-1;
}
else
{
程序阻塞;
}
3.v操作 sem_post()
释放资源
#include 信号量+1
if(是否有阻塞的线程)
{
唤醒g线程;
}
4.示例
一个进程创建两个线程,一个线程向缓冲区中写入数据,另一个线程读取缓冲区中数据并打印输出;
#include 只对输出进行了限制,即输入后输出,没有限制输出完成后再输入;
5.生产者和消费者的关系
生产者
sem1 = 1;
while(1)
{
p(&sem1); //申请自己资源,信号量-1
write(); //先要执行的操作
v(&sem2); //释放别人资源,信号量+1
}
消费者
sem2 = 0;
while(1)
{
p(&sem2);
read();
v(&sem1);
}
将示例更改
#include 2、互斥
临界数据(公共数据):多个线程都能够访问的数据;
临界区:包含临界资源的一段代码;
互斥锁:来保护临界资源
互斥锁不能直接操作,必须通过接口函数完成访问;
每个要保护数据的线程都要加锁!
1.互斥锁的初始化 — pthread_mutex_init()
#include 2.申请锁 — pthread_mutex_lock()
3.释放锁 — pthread_mutex_unlock()
#include 利用互斥锁,第一个线程访问临界数据时,第二个线程不能访问;
#include 四、进程间通信
每个进程的用户空间相互独立,内核空间互通;所以进程间的通信是借助内核空间完成通信;
UNIX:管道、信号 Linux:管道、信号、system V IPC对象(系统5 IPC对象);
system V IPC对象:共享内存、消息队列、信号灯集;
以上用于本地通信;只有套接字用于网络通信,所以进程间通信方式一共有6种;
1、管道
由用户空间调用函数接口,在内核空间创建管道;所有访问要经过内核空间;
1.1无名管道_pipe
创建管道之后在文件系统中==不可见;==有固定的读端(pipefd[0])和写端(pipefd[1]);
半双工的通信机制;(只能读或者写,不能同时读写)
无名管道只能用于具有亲缘关系的进程间通信;
#include #include 无名管道的读特性和写特性
读特性:
写端存在:
缓冲区有数据---返回从缓冲区中读到的字节数;
缓冲区无数据---阻塞
写端不存在:(close pfd[1])
缓冲区有数据---返回从缓冲区中读到的字节数;
缓冲区无数据---直接返回0
写特性:
读端存在:
缓冲区有空间---返回写入的字节数;
缓冲区无空间---阻塞,直到有空间才会继续写入;(计算无名管道的空间大小)
读端不存在:(close pfd[0])
无论有无空间---管道破裂(13号信号),程序强行结束;
计算无名管道的空间大小
#include 捕获管道破裂信号
#include 1.2有名管道_fifo
创建有名管道之后,以文件的形式存在;(mkfifo创建的管道在文件中可见)
有名管道没有固定的读端和写端;可以通过文件描述符指定对管道进行读写;
#include 一个进程写入,一个进程读取并打印;
fopen有缓冲区,一般用来打开普通文件,open无缓冲区,打开其他文件;
#include 发送端
#include " , argv[0]);
exit(-1);
}
int fd = open(argv[1], O_WRONLY); //打开方式为读写
if(fd < 0)
{
perror("open");
exit(-1);
}
printf("open fifo!\n");
char buf[64] = {0};
{
while(1)
{
fgets(buf, 64, stdin);
write(fd, buf, 64);
}
}
return 0;
}
读取端
#include " , argv[0]);
exit(-1);
}
int fd = open(argv[1], O_RDONLY); //打开方式为只读
if(fd < 0)
{
perror("open");
exit(-1);
}
printf("open fifo!\n");
char buf[64] = {0};
{
while(1)
{
read(fd, buf, 64);
printf("%s", buf);
}
}
return 0;
}
读端和写端同时存在,管道才可以打开;
2、 信号
信号是在软件层次上的一种异步中断;(中断一般由硬件设备产生)
处理信号的方式:默认处理、忽略、捕获(修改为非默认处理方式);
查看信号相关指令
kill -l //显示当前系统可用信号 宏 == 数字
//1-31号信号继承于unix;为常用信号;
操作信号相关指令
kill:
kill -9 1234 //向1234进程发送信号9
kill -9 -1234 //向1234进程组发送信号9 进程组:有亲缘关系的所有进程
kill -9 -1 //向除了init进程外的其他所有进程发送信号9
killall:
killall a.out //向进程名为a.out的所有进程发送默认信号15(终止)
信号相关接口函数
kill:向指定进程发送指定信号;
#include raise:向当前进程发送信号;
#include alarm定时器
以秒为单位将SIGALRM信号发送给调用进程。
定时器在一个进程中只能存在一个;
在定时器结束后会向当前进程发送信号14(SIGALRM),结束当前进程;
#include pause
在当前函数位置挂起,等待接收SIGALRM信号;
#include signal
#include 3. system V IPC对象:共享内存、消息队列、信号灯集;
都是在内核空间中创建;
打开或创建IPC通道:shm_get、msg_get、sem_get
不同的进程访问同一个IPC对象时,通过key来创建的内核空间,才能被不同的进程通过key进行访问。
IPC对象在创建之后,不会自动删除,只能由用户手动删除;
IPCS — 查看系统IPC对象;
3.1 共享内存
是进程间通信机制中通信效率最高的通信方式;
通过内存映射技术,取消了频繁的系统调用(拷贝);
共享内存实现流程:
(1)创建或者打开共享内存 shmget()
(2)将共享内存映射到用户空间 shmat()
(3)操作共享内存
(4)取消内存映射 shmdt()
(5)删除共享内存 shmctl()
3.2 消息队列
通过消息结构体中的type可以在传输消息时选择性地读取;
消息队列使用流程:
创建或者打开消息队列 msgget()
发送消息 msgsnd()
接收消息 msgrcy()
删除消息队列 msgctl()
3.3 信号灯集
信号灯就是信号量的集合,申请多个资源时,避免死锁。
信号灯集使用流程:
1、创建或者打开信号灯集 semget()
2、初始化信号灯集 semctl()
3、PV操作 semop()
4、删除信号灯集 semctl()
pes.h>
#include
int kill(pid_t pid, int sig);
参数:
pid:进程号;
sig:指定信号;
返回值:
成功返回0,失败返回-1;
raise:向当前进程发送信号;
```c
#include
int raise(int sig);
alarm定时器
以秒为单位将SIGALRM信号发送给调用进程。
定时器在一个进程中只能存在一个;
在定时器结束后会向当前进程发送信号14(SIGALRM),结束当前进程;
#include pause
在当前函数位置挂起,等待接收SIGALRM信号;
#include signal
#include 3. system V IPC对象:共享内存、消息队列、信号灯集;
都是在内核空间中创建;
打开或创建IPC通道:shm_get、msg_get、sem_get
不同的进程访问同一个IPC对象时,通过key来创建的内核空间,才能被不同的进程通过key进行访问。
IPC对象在创建之后,不会自动删除,只能由用户手动删除;
IPCS — 查看系统IPC对象;
3.1 共享内存
是进程间通信机制中通信效率最高的通信方式;
通过内存映射技术,取消了频繁的系统调用(拷贝);
共享内存实现流程:
(1)创建或者打开共享内存 shmget()
(2)将共享内存映射到用户空间 shmat()
(3)操作共享内存
(4)取消内存映射 shmdt()
(5)删除共享内存 shmctl()
3.2 消息队列
通过消息结构体中的type可以在传输消息时选择性地读取;
消息队列使用流程:
创建或者打开消息队列 msgget()
发送消息 msgsnd()
接收消息 msgrcy()
删除消息队列 msgctl()
3.3 信号灯集
信号灯就是信号量的集合,申请多个资源时,避免死锁。
信号灯集使用流程:
1、创建或者打开信号灯集 semget()
2、初始化信号灯集 semctl()
3、PV操作 semop()
4、删除信号灯集 semctl()