YOLOv8改进 添加可变形注意力机制DAttention

一、Deformable Attention Transformer论文

论文地址:arxiv.org/pdf/2201.00520.pdf
二、Deformable Attention Transformer注意力结构
Deformable Attention Transformer包含可变形注意力机制,允许模型根据输入的内容动态调整注意力权重。在传统的Transformer中,注意力是通过对查询和键向量之间的点积来确定的,然后将输入嵌入的加权和进行计算。然而,这种方法假设了一个刚性的注意力模式,其中每个查询都会参与固定的一组键。
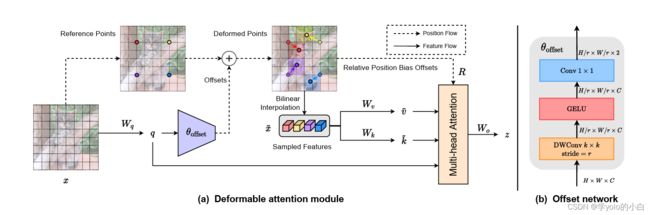
在可变形注意力转换器中,注意力权重使用学习机制进行计算,该机制可以根据输入学习调整注意力模式。这使得模型能够捕捉输入的不同部分之间更复杂的关系,从而在需要建模长距离依赖或捕捉细粒度细节的任务上提供更好的性能。可变形注意力机制DAttention引入了额外的可学习参数,用于计算注意力权重。这些参数通过反向传播在训练过程中进行学习,使得模型能够调整注意力模式以更好地适应输入数据。
三、代码实现
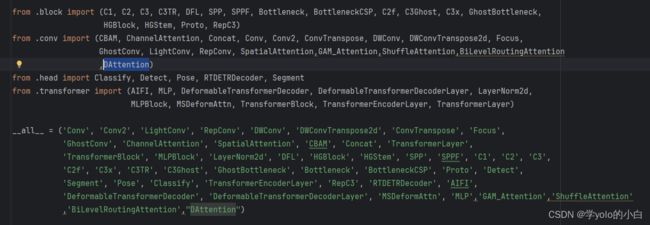
1、在官方的yolov8包中ultralytics\ultralytics\nn\modules\__init__.py文件中的from .conv import和__all__中加入注意力机制DAttention。
2、在ultralytics\ultralytics\nn\modules\conv.py文件中上边引用包:
import einops
from timm.models.layers import trunc_normal_
import torch.nn.functional as F__all__中同样添加DAttention:

并在该conv.py文件中输入DAttention的代码:
######### 添加DAttention #####################
class LayerNormProxy(nn.Module):
def __init__(self, dim):
super().__init__()
self.norm = nn.LayerNorm(dim)
def forward(self, x):
x = einops.rearrange(x, 'b c h w -> b h w c')
x = self.norm(x)
return einops.rearrange(x, 'b h w c -> b c h w')
class DAttention(nn.Module):
def __init__(
self, q_size=(224, 224), kv_size=(224, 224), n_heads=8, n_head_channels=32, n_groups=1,
attn_drop=0.0, proj_drop=0.0, stride=1,
offset_range_factor=-1, use_pe=True, dwc_pe=True,
no_off=False, fixed_pe=False, ksize=9, log_cpb=False
):
super().__init__()
n_head_channels = int(q_size / 8)
q_size = (q_size, q_size)
self.dwc_pe = dwc_pe
self.n_head_channels = n_head_channels
self.scale = self.n_head_channels ** -0.5
self.n_heads = n_heads
self.q_h, self.q_w = q_size
# self.kv_h, self.kv_w = kv_size
self.kv_h, self.kv_w = self.q_h // stride, self.q_w // stride
self.nc = n_head_channels * n_heads
self.n_groups = n_groups
self.n_group_channels = self.nc // self.n_groups
self.n_group_heads = self.n_heads // self.n_groups
self.use_pe = use_pe
self.fixed_pe = fixed_pe
self.no_off = no_off
self.offset_range_factor = offset_range_factor
self.ksize = ksize
self.log_cpb = log_cpb
self.stride = stride
kk = self.ksize
pad_size = kk // 2 if kk != stride else 0
self.conv_offset = nn.Sequential(
nn.Conv2d(self.n_group_channels, self.n_group_channels, kk, stride, pad_size, groups=self.n_group_channels),
LayerNormProxy(self.n_group_channels),
nn.GELU(),
nn.Conv2d(self.n_group_channels, 2, 1, 1, 0, bias=False)
)
if self.no_off:
for m in self.conv_offset.parameters():
m.requires_grad_(False)
self.proj_q = nn.Conv2d(
self.nc, self.nc,
kernel_size=1, stride=1, padding=0
)
self.proj_k = nn.Conv2d(
self.nc, self.nc,
kernel_size=1, stride=1, padding=0)
self.proj_v = nn.Conv2d(
self.nc, self.nc,
kernel_size=1, stride=1, padding=0
)
self.proj_out = nn.Conv2d(
self.nc, self.nc,
kernel_size=1, stride=1, padding=0
)
self.proj_drop = nn.Dropout(proj_drop, inplace=True)
self.attn_drop = nn.Dropout(attn_drop, inplace=True)
if self.use_pe and not self.no_off:
if self.dwc_pe:
self.rpe_table = nn.Conv2d(
self.nc, self.nc, kernel_size=3, stride=1, padding=1, groups=self.nc)
elif self.fixed_pe:
self.rpe_table = nn.Parameter(
torch.zeros(self.n_heads, self.q_h * self.q_w, self.kv_h * self.kv_w)
)
trunc_normal_(self.rpe_table, std=0.01)
elif self.log_cpb:
# Borrowed from Swin-V2
self.rpe_table = nn.Sequential(
nn.Linear(2, 32, bias=True),
nn.ReLU(inplace=True),
nn.Linear(32, self.n_group_heads, bias=False)
)
else:
self.rpe_table = nn.Parameter(
torch.zeros(self.n_heads, self.q_h * 2 - 1, self.q_w * 2 - 1)
)
trunc_normal_(self.rpe_table, std=0.01)
else:
self.rpe_table = None
@torch.no_grad()
def _get_ref_points(self, H_key, W_key, B, dtype, device):
ref_y, ref_x = torch.meshgrid(
torch.linspace(0.5, H_key - 0.5, H_key, dtype=dtype, device=device),
torch.linspace(0.5, W_key - 0.5, W_key, dtype=dtype, device=device),
indexing='ij'
)
ref = torch.stack((ref_y, ref_x), -1)
ref[..., 1].div_(W_key - 1.0).mul_(2.0).sub_(1.0)
ref[..., 0].div_(H_key - 1.0).mul_(2.0).sub_(1.0)
ref = ref[None, ...].expand(B * self.n_groups, -1, -1, -1) # B * g H W 2
return ref
@torch.no_grad()
def _get_q_grid(self, H, W, B, dtype, device):
ref_y, ref_x = torch.meshgrid(
torch.arange(0, H, dtype=dtype, device=device),
torch.arange(0, W, dtype=dtype, device=device),
indexing='ij'
)
ref = torch.stack((ref_y, ref_x), -1)
ref[..., 1].div_(W - 1.0).mul_(2.0).sub_(1.0)
ref[..., 0].div_(H - 1.0).mul_(2.0).sub_(1.0)
ref = ref[None, ...].expand(B * self.n_groups, -1, -1, -1) # B * g H W 2
return ref
def forward(self, x):
x = x
B, C, H, W = x.size()
dtype, device = x.dtype, x.device
q = self.proj_q(x)
q_off = einops.rearrange(q, 'b (g c) h w -> (b g) c h w', g=self.n_groups, c=self.n_group_channels)
offset = self.conv_offset(q_off).contiguous() # B * g 2 Hg Wg
Hk, Wk = offset.size(2), offset.size(3)
n_sample = Hk * Wk
if self.offset_range_factor >= 0 and not self.no_off:
offset_range = torch.tensor([1.0 / (Hk - 1.0), 1.0 / (Wk - 1.0)], device=device).reshape(1, 2, 1, 1)
offset = offset.tanh().mul(offset_range).mul(self.offset_range_factor)
offset = einops.rearrange(offset, 'b p h w -> b h w p')
reference = self._get_ref_points(Hk, Wk, B, dtype, device)
if self.no_off:
offset = offset.fill_(0.0)
if self.offset_range_factor >= 0:
pos = offset + reference
else:
pos = (offset + reference).clamp(-1., +1.)
if self.no_off:
x_sampled = F.avg_pool2d(x, kernel_size=self.stride, stride=self.stride)
assert x_sampled.size(2) == Hk and x_sampled.size(3) == Wk, f"Size is {x_sampled.size()}"
else:
x_sampled = F.grid_sample(
input=x.reshape(B * self.n_groups, self.n_group_channels, H, W),
grid=pos[..., (1, 0)], # y, x -> x, y
mode='bilinear', align_corners=True) # B * g, Cg, Hg, Wg
x_sampled = x_sampled.reshape(B, C, 1, n_sample)
# self.proj_k.weight = torch.nn.Parameter(self.proj_k.weight.float())
# self.proj_k.bias = torch.nn.Parameter(self.proj_k.bias.float())
# self.proj_v.weight = torch.nn.Parameter(self.proj_v.weight.float())
# self.proj_v.bias = torch.nn.Parameter(self.proj_v.bias.float())
# 检查权重的数据类型
q = q.reshape(B * self.n_heads, self.n_head_channels, H * W)
k = self.proj_k(x_sampled).reshape(B * self.n_heads, self.n_head_channels, n_sample)
v = self.proj_v(x_sampled).reshape(B * self.n_heads, self.n_head_channels, n_sample)
attn = torch.einsum('b c m, b c n -> b m n', q, k) # B * h, HW, Ns
attn = attn.mul(self.scale)
if self.use_pe and (not self.no_off):
if self.dwc_pe:
residual_lepe = self.rpe_table(q.reshape(B, C, H, W)).reshape(B * self.n_heads, self.n_head_channels,
H * W)
elif self.fixed_pe:
rpe_table = self.rpe_table
attn_bias = rpe_table[None, ...].expand(B, -1, -1, -1)
attn = attn + attn_bias.reshape(B * self.n_heads, H * W, n_sample)
elif self.log_cpb:
q_grid = self._get_q_grid(H, W, B, dtype, device)
displacement = (
q_grid.reshape(B * self.n_groups, H * W, 2).unsqueeze(2) - pos.reshape(B * self.n_groups,
n_sample,
2).unsqueeze(1)).mul(
4.0) # d_y, d_x [-8, +8]
displacement = torch.sign(displacement) * torch.log2(torch.abs(displacement) + 1.0) / np.log2(8.0)
attn_bias = self.rpe_table(displacement) # B * g, H * W, n_sample, h_g
attn = attn + einops.rearrange(attn_bias, 'b m n h -> (b h) m n', h=self.n_group_heads)
else:
rpe_table = self.rpe_table
rpe_bias = rpe_table[None, ...].expand(B, -1, -1, -1)
q_grid = self._get_q_grid(H, W, B, dtype, device)
displacement = (
q_grid.reshape(B * self.n_groups, H * W, 2).unsqueeze(2) - pos.reshape(B * self.n_groups,
n_sample,
2).unsqueeze(1)).mul(
0.5)
attn_bias = F.grid_sample(
input=einops.rearrange(rpe_bias, 'b (g c) h w -> (b g) c h w', c=self.n_group_heads,
g=self.n_groups),
grid=displacement[..., (1, 0)],
mode='bilinear', align_corners=True) # B * g, h_g, HW, Ns
attn_bias = attn_bias.reshape(B * self.n_heads, H * W, n_sample)
attn = attn + attn_bias
attn = F.softmax(attn, dim=2)
attn = self.attn_drop(attn)
out = torch.einsum('b m n, b c n -> b c m', attn, v)
if self.use_pe and self.dwc_pe:
out = out + residual_lepe
out = out.reshape(B, C, H, W)
y = self.proj_drop(self.proj_out(out))
h, w = pos.reshape(B, self.n_groups, Hk, Wk, 2), reference.reshape(B, self.n_groups, Hk, Wk, 2)
return y3、在 ultralytics\ultralytics\nn\tasks.py文件中开头引入DAttention。

并在该文件 def parse_model模块中加入DAttention注意力机制代码:
elif m in {DAttention}:
c2 = ch[f]
args = [c2, *args]4、创建yolov8+DAttention的yaml文件:
(可根据自己的需求选择DAttention注意力机制插入的位置,本文以插入yolov8结构中池化层SPPF后边为例)
# Ultralytics YOLO , AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 2 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
- [-1, 1, DAttention, [[20, 20]]]
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 13
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 16 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 19 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 22 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
四、模型验证
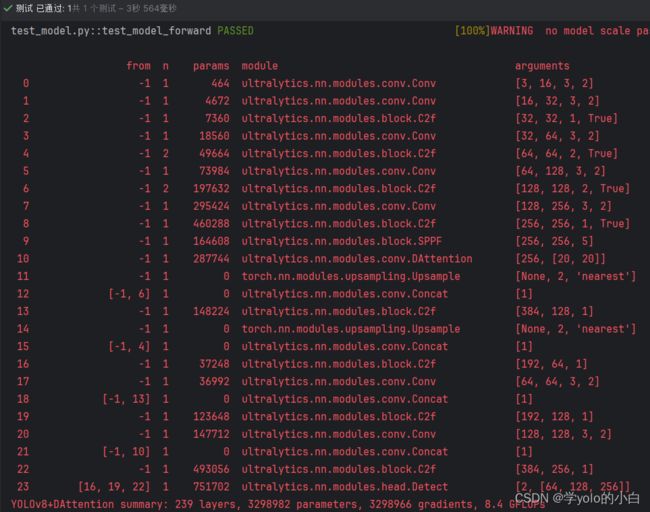
可以看出模型中已经包含DAttention注意力机制。