XGBoost理论推导+论文解读-下篇
确定树结构
通常采用贪心法,每次尝试分裂一个叶节点,计算分裂后的增益,选增益最大的。这个方法在之前的决策树算法中大量被使用。而增益的计算方式比如ID3的信息增益,C4.5的信息增益率,CART的Gini系数等。
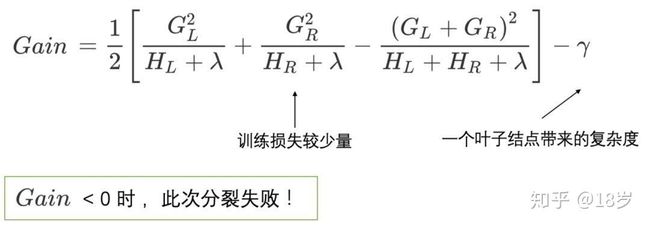
而在XGBoost中,计算增益的公式:
Gain = 1 2 [ G L 2 H L + λ ⏟ 左子树分数 + G R 2 H R + λ ⏟ 右子树分数 − ( G L + G R ) 2 H L + H R + λ ⏟ 分裂前分数 ] − γ ⏟ 新叶节点复杂度 \text { Gain }=\frac{1}{2}[\underbrace{\frac{G_L^2}{H_L+\lambda}}_{\text {左子树分数 }}+\underbrace{\frac{G_R^2}{H_R+\lambda}}_{\text {右子树分数 }}-\underbrace{\frac{\left(G_L+G_R\right)^2}{H_L+H_R+\lambda}}_{\text {分裂前分数 }}]-\underbrace{\gamma}_{\text {新叶节点复杂度 }} Gain =21[左子树分数 HL+λGL2+右子树分数 HR+λGR2−分裂前分数 HL+HR+λ(GL+GR)2]−新叶节点复杂度 γ
证明:
优化目标: m i n O b j ( t ) − 1 2 ∑ j = 1 T ( G j 2 H j + λ ) + γ 优化目标:min Obj^{(t)}-\frac{1}{2} \sum_{j=1}^T\left(\frac{G_j^2}{H_j+\lambda}\right)+\gamma 优化目标:minObj(t)−21∑j=1T(Hj+λGj2)+γ
我们希望损失函数越小越好,也就希望以下式子越大越好: ( ∑ i ∈ j g i ) 2 ∑ i ∈ j h i + λ \frac{(\sum_{i \in j} g_i)^2}{\sum_{i \in j} h_i + \lambda} ∑i∈jhi+λ(∑i∈jgi)2,而它正是XGBoost用于分枝时的指标“结构分数”(Structure Score)。
要让目标函数下降,则需要分裂节点来增加模型的复杂度,从而更好地拟合数据
接下来对单个叶子节点进行分析:只对一个节点进行分裂
分裂前: O b j 前 = − 1 2 ∑ j = 1 T G j 2 H j + λ + γ T Obj_{前}=-\frac{1}{2} \sum_{j=1}^{T} \frac{G_j^2}{H_j+\lambda}+\gamma T Obj前=−21∑j=1THj+λGj2+γT
分裂后: O b j 后 = − 1 2 ∑ j = 1 T − 1 G j 2 H j + λ + γ ( T − 1 ) − 1 2 G L 2 H L + λ − 1 2 G R 2 H R + λ + 2 γ Obj_后=-\frac{1}{2} \sum_{j=1}^{T-1} \frac{G_j^2}{H_j+\lambda}+\gamma (T-1)-\frac{1}{2}\frac{G_L^2}{H_L+\lambda}-\frac{1}{2}\frac{G_R^2}{H_R+\lambda}+2\gamma Obj后=−21∑j=1T−1Hj+λGj2+γ(T−1)−21HL+λGL2−21HR+λGR2+2γ
注释:
等号右边前两项是分裂前除了需要分析的父节点以外的其他T-1个节点的损失值, 2 γ 是由于由一个父节点分裂成左右两个节点(二叉树) 2\gamma是由于由一个父节点分裂成左右两个节点(二叉树) 2γ是由于由一个父节点分裂成左右两个节点(二叉树) ,而目标是让obj最小化,也就是 o b j 后 − o b j 前 ≤ 0 obj_后-obj_前 \le 0 obj后−obj前≤0
o b j 后 − o b j 前 = 1 2 [ G L 2 H L L + λ + G R 2 H R + λ − G 2 H + λ ] − γ = 1 2 [ G L 2 H L + λ + G R 2 H R + λ − ( G L + G R ) 2 H L + H R + λ ] − γ obj_后-obj_前=\frac{1}{2}\left[\frac{G_L^2}{H_{L_L}+\lambda}+\frac{G_R^2}{H_R+\lambda}-\frac{G^2}{H+\lambda}\right]-\gamma \\=\frac{1}{2}\left[\frac{G_L^2}{H_{L}+\lambda}+\frac{G_R^2}{H_R+\lambda}-\frac{\left(G_L+G_R\right)^2}{H_L+H_R+\lambda}\right]-\gamma obj后−obj前=21[HLL+λGL2+HR+λGR2−H+λG2]−γ=21[HL+λGL2+HR+λGR2−HL+HR+λ(GL+GR)2]−γ
此时一开始的优化目标也就变为max ( o b j 后 − o b j 前 ) (obj_后-obj_前) (obj后−obj前) ,即
m a x [ G L 2 H L + λ + G R 2 H R + λ − ( G L + G R ) 2 H L + H R + λ ] − 2 γ max \left[\frac{G_L^2}{H_{L}+\lambda}+\frac{G_R^2}{H_R+\lambda}-\frac{\left(G_L+G_R\right)^2}{H_L+H_R+\lambda}\right]-2\gamma max[HL+λGL2+HR+λGR2−HL+HR+λ(GL+GR)2]−2γ
由于每一个结点每一次分裂都会多产生一个节点(二叉树),从而会导致损失函数多一个 γ \gamma γ,每一个节点都会存在这个现象,所以 γ \gamma γ可以忽略不计。
解释父节点的结构分数是 ( G L + G R ) 2 H L + H R + λ \frac{\left(G_L+G_R\right)^2}{H_L+H_R+\lambda} HL+HR+λ(GL+GR)2?
首先每个节点的结构计算公式 S c o r e j = ( ∑ i ∈ j g i ) 2 ∑ i ∈ j h i + λ Score_j = \frac{(\sum_{i \in j}g_i)^2}{\sum_{i \in j}h_i + \lambda} Scorej=∑i∈jhi+λ(∑i∈jgi)2,而父节点上的样本相当于左子节点的样本加上右子节点上的样本,再遵循最终的求导结果可以转化为各个样本的求导结果之和,所以最终的结果是 ( G L + G R ) 2 H L + H R + λ \frac{\left(G_L+G_R\right)^2}{H_L+H_R+\lambda} HL+HR+λ(GL+GR)2。
结构分数的意义
S c o r e j = 节点 j 上所有样本的一阶导数之和的平方 节点 j 上所有样本的二阶导数之和 + λ = ( ∑ i ∈ L g i ) 2 ∑ i ∈ L h i + λ + ( ∑ i ∈ R g i ) 2 ∑ i ∈ R h i + λ − ( ∑ i ∈ P g i ) 2 ∑ i ∈ P h i + λ Score_j = \frac{节点j上所有样本的一阶导数之和的平方}{节点j上所有样本的二阶导数之和 + \lambda}\\= \frac{(\sum_{i \in L}g_i)^2}{\sum_{i \in L}h_i + \lambda} + \frac{(\sum_{i \in R}g_i)^2}{\sum_{i \in R}h_i + \lambda} - \frac{(\sum_{i \in P}g_i)^2}{\sum_{i \in P}h_i + \lambda} Scorej=节点j上所有样本的二阶导数之和+λ节点j上所有样本的一阶导数之和的平方=∑i∈Lhi+λ(∑i∈Lgi)2+∑i∈Rhi+λ(∑i∈Rgi)2−∑i∈Phi+λ(∑i∈Pgi)2
与信息熵、基尼系数等可以评价单一节点的指标不同,结构分数只能够评估结构本身的优劣,不能评估节点的优劣,分数越高则说明树结构质量越高。
例子:
样本 y y_hat 1 1 0.5 2 -2 0.5 3 -2 0.5
- 分割方案1:(1,23)
左子节点 y y_hat 右子节点 y y_hat 1 1 0.5 2 -2 0.5 3 -2 0.5
- 分割方案2:(12,3)
左子节点 y y_hat 右子节点 y y_hat 1 1 0.5 3 -2 0.5 2 -2 0.5 假设现在执行的是XGBoost回归,损失函数为0.5倍MSE,公式为 1 2 ( y − y ^ ) 2 \frac{1}{2}(y - \hat{y})^2 21(y−y^)2,假设lambda=1。那基于MSE的一阶导数为:
l = 1 2 ( y i − y i ^ ) 2 l ′ = ∂ ∂ y i ^ 1 2 ( y i − y i ^ ) 2 = − ( y i − y i ^ ) = y i ^ − y i \begin{align} l&= \frac{1}{2}(y_i - \hat{y_i})^2 \\ \\ l' &= \frac{\partial}{\partial \hat{y_i}} \frac{1}{2}(y_i - \hat{y_i})^2\\ \\ &= - (y_i - \hat{y_i})\\ \\ &= \hat{y_i} - y_i\\ \\ \end{align} ll′=21(yi−yi^)2=∂yi^∂21(yi−yi^)2=−(yi−yi^)=yi^−yi
基于MSE的二阶导数为:
l ′ ′ = ∂ ∂ y i ^ ( y i ^ − y i ) = 1 \begin{align} l'' &= \frac{\partial}{\partial \hat{y_i}} (\hat{y_i} - y_i)\\ \\ &= 1 \end{align} l′′=∂yi^∂(yi^−yi)=1
方案 左侧结构分数 右侧结构分数 父节点结构分数 增益 (1,23) 0.125 8.333 5.0625 3.3958 (12,3) 1.333 3.125 5.0625 -0.6041
因此,每次分裂,枚举所有可能的分裂方案,就和CART中回归树进行划分一样,要枚举所有特征和特征的取值。该算法称为Exact Greedy Algorithm,如下图所示:
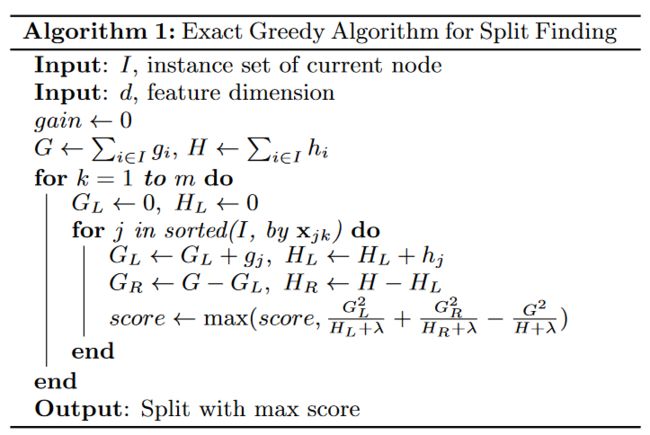
Exact Greedy Algorithm的复杂度:
设树的高度为H,特征数d,则复杂度为 O(Hdnlogn)。 其中,排序为O(nlogn),每个特征都要排序所以乘以d,每一层都要这样一遍,所以乘以高度H(每一层第一次分裂就已经对特征的信息增益排序好了,同层的后续分类直接用排序信息就可以直接检索特征进行分裂)
证明O(nlogn)
决策树是一棵二叉树,每个叶子节点表示元素之间的一组可能排序。若决策树的深度为d,则这棵树最多有 2 d 2^d 2d个叶子节点,相反地,如果L个叶子节点的决策树,他的深度至少是 l o g 2 L log_2L log2L( 2 T ≥ L 2^T≥L 2T≥L)
所以,对n个元素排序的决策树必然有n!片树叶(因为n个数有n!种不同的大小关系),所以决策树的深度至少是log(n!),即至少需要log(n!)次比较
而
l o g ( n ! ) = l o g n + l o g ( n − 1 ) + l o g ( n − 2 ) + . . . l o g 2 + l o g 1 ≥ l o g n + l o g ( n − 1 ) + l o g ( n − 2 ) + . . . + l o g ( n / 2 ) ≥ ( n / 2 ) l o g ( n / 2 ) ( 忽略常数 ) = O ( n l o g n ) \begin{align} log(n!)&=logn+log(n-1)+log(n-2)+...log2+log1\\ &\ge logn+log(n-1)+log(n-2)+...+log(n/2)\\ &\ge (n/2)log(n/2)(忽略常数)\\ &=O(nlogn) \end{align} log(n!)=logn+log(n−1)+log(n−2)+...log2+log1≥logn+log(n−1)+log(n−2)+...+log(n/2)≥(n/2)log(n/2)(忽略常数)=O(nlogn)
停止生长
一棵树不会一直生长下去,下面是一些常见的限制条件。
(1) 当新引入的一次分裂所带来的增益Gain<0时,放弃当前的分裂。这是训练损失和模型结构复杂度的博弈过程。
(2) 当树达到最大深度时,停止建树,因为树的深度太深容易出现过拟合,这里需要设置一个超参数max_depth。
(3) 当引入一次分裂后,重新计算新生成的左、右两个叶子结点的样本权重和。如果任一个叶子结点的样本权重低于某一个阈值,也会放弃此次分裂。这涉及到一个超参数:最小样本权重和,是指如果一个叶子节点包含的样本数量太少也会放弃分裂,防止树分的太细,这也是过拟合的一种措施。
每个叶子结点的样本权值和计算方式如下: w j = − b 2 a = − G j H j + λ , 则此时目标函数取到最小值 w_j=-\frac{b}{2a}=-\frac{G_j}{H_j+ \lambda},则此时目标函数取到最小值 wj=−2ab=−Hj+λGj,则此时目标函数取到最小值
XGBoost的一些trick
步长 step-size
XGBoost也可以加入步长η(有的也叫收缩率Shrinkage),通常步长 η 取值为0.1,这也是防止过拟合的好方法:
y ^ i t = y ^ i ( t − 1 ) + η f t ( x i ) \hat{y}_i^t=\hat{y}_i^{(t-1)}+\eta f_t\left(x_i\right) y^it=y^i(t−1)+ηft(xi)
行列抽样
XGBoost借鉴随机森林也使用了列抽样(在每一次分裂中使用特征抽样),进一步防止过拟合,并加速训练和预测过程。此外,在实现中还有行抽样(样本抽样)
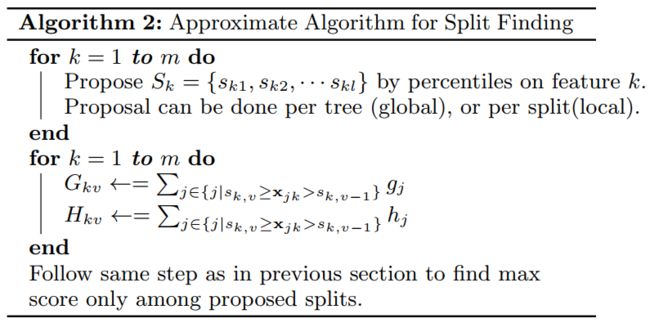
树节点划分算法 - Approximate Algorithm
当数据量十分庞大,以致于不能全部放入内存时,Exact Greedy 算法就会很慢。因此XGBoost引入了近似的算法。简单的说,就是根据特征k的分布来确定l个候选切分点 S k = s k 1 , s k 2 , . . . , s k l S_k={s_{k1},s_{k2},...,s_{kl}} Sk=sk1,sk2,...,skl,然后根据这些候选切分点把相应的样本放入对应的桶中,对每个桶的G,H进行累加。最后在候选切分点集合上贪心查找,和Exact Greedy Algorithm类似。该算法描述如下:
给定了候选切分点后,一个例子为:
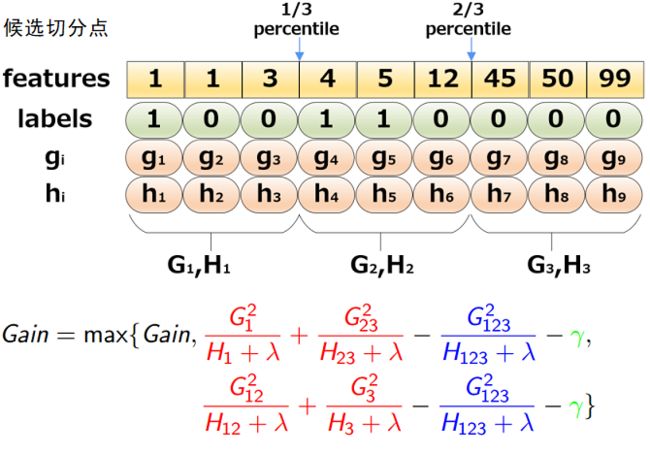
那么,现在有两个问题:
- 如何选取候选切分点 S k = s k 1 , s k 2 , . . . , s k l S_k={s_{k1},s_{k2},...,s_{kl}} Sk=sk1,sk2,...,skl呢?
- 什么时候进行候选切分点的选取?
切分点的选取 - Weighted Quantile Sketch
基于此,XGBoost提出了一系列加快寻找最佳分裂点的方案:
- **特征预排序+缓存+并行查找:**XGBoost在训练之前,预先对每个特征按照特征值大小(排序依据:hi)进行排序,然后保存为block结构,后面的迭代中会重复地使用这个结构,使计算量大大减小。XGBoost支持利用多个线程并行地计算每个特征的最佳分割点,这不仅大大提升了结点的分裂速度,也极利于大规模训练集的适应性扩展。
- **分位点近似法:**对每个特征按照特征值排序后,采用类似分位点选取的方式,仅仅选出常数个特征值作为该特征的候选分割点,在寻找该特征的最佳分割点时,从候选分割点中选出最优的一个。
分位数(先把数值进行排序,然后根据你采用的几分位数把数据分为几份即可):即把概率分布划分为连续的区间,每个区间的概率相同。
以统计学常见的四分位数为例:
- 第一四分位数(Q1),又称“较小四分位数”,等于该样本中所有数值由小到大排列后第25%的数字;
- 第二四分位数(Q2),又称“中位数”,等于该样本中所有数值由小到大排列后第50%的数字;
- 第三四分位数(Q3),又称“较大四分位数”,等于该样本中所有数值由小到大排列后第75%的数字。
而XGBoost不单单是采用简单的分位数的方法,而是对分位数进行加权(使用二阶梯度h),称为:Weighted Quantile Sketch。PS:上面的那个例子采用的是没有使用二阶导加权的分位数。
对特征k构造multi-set 的数据集: D k = ( x 1 k , h 1 ) , ( x 2 k , h 2 ) , . . . , ( x n k , h n ) D_k=(x_{1k},h_1),(x_{2k},h_2),...,(x_{nk},h_n) Dk=(x1k,h1),(x2k,h2),...,(xnk,hn), 其中 x i k x_{ik} xik表示样本i的特征k的取值,而 h i h_i hi则为对应的二阶梯度。
可以定义一个rank function为:
r k ( z ) = 1 ∑ ( x , h ) ∈ D k h ∑ ( x , h ) ∈ D k , x < z h r_k(z)=\frac{1}{\sum_{(x, h) \in D_k} h} \sum_{(x, h) \in D_k, x
rank function表达了第 k k k 个特征小于z的样本比例,和之前的分位数挺相似,不过这里是按照二阶梯度进行累计。而候选切分点 { s k 1 , s k 2 , ⋯ , s k l } \left\{s_{k 1}, s_{k 2}, \cdots, s_{k l}\right\} {sk1,sk2,⋯,skl} 要求:
∣ ∣ r k ( s k , j ) − r k ( s k , j + 1 ) ∣ < ε , s k 1 = min i x i k , s k l = max i x i k || r_k\left(s_{k, j}\right)-r_k\left(s_{k, j+1}\right) \mid<\varepsilon, \quad s_{k 1}=\min _i x_{i k}, s_{k l}=\max _i x_{i k} ∣∣rk(sk,j)−rk(sk,j+1)∣<ε,sk1=iminxik,skl=imaxxik
用大白话说就是让相邻两个候选分裂点相差不超过某个值ε。因此,总共会得到1/ε个切分点。
一个例子如下:
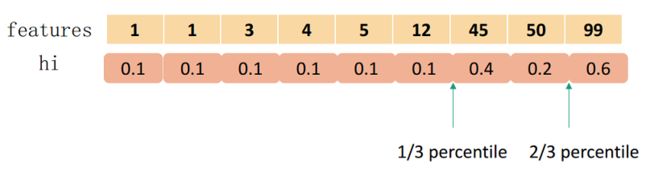
要切分为3个,总和为1.8,因此第1个在0.6处,第2个在1.2处。
那么,为什么要用二阶梯度加权?将前面我们泰勒二阶展开后的目标函数2-4进行配方:
∑ i = 1 N ( g i f t ( x i ) + 1 2 h i f t 2 ( x i ) ) + Ω ( f t ) = ∑ i = 1 N 1 2 h i ( 2 g i h i f t ( x i ) + f t 2 ( x i ) ) + Ω ( f t ) = ∑ i = 1 N 1 2 h i ( g i 2 h i 2 + 2 g i h i f t ( x i ) + f t 2 ( x i ) ) + Ω ( f t ) = ∑ i = 1 N 1 2 h i ( f t ( x i ) − ( − g i h i ) ) 2 + Ω ( f t ) \begin{aligned} & \sum_{i=1}^N\left(g_i f_t\left(\mathbf{x}_{\mathbf{i}}\right)+\frac{1}{2} h_i f_t^2\left(\mathbf{x}_{\mathbf{i}}\right)\right)+\Omega\left(f_t\right) \\ = & \sum_{i=1}^N \frac{1}{2} h_i\left(2 \frac{g_i}{h_i} f_t\left(\mathbf{x}_{\mathbf{i}}\right)+f_t^2\left(\mathbf{x}_{\mathbf{i}}\right)\right)+\Omega\left(f_t\right) \\ = & \sum_{i=1}^N \frac{1}{2} h_i\left(\frac{g_i^2}{h_i^2}+2 \frac{g_i}{h_i} f_t\left(\mathbf{x}_{\mathbf{i}}\right)+f_t^2\left(\mathbf{x}_{\mathbf{i}}\right)\right)+\Omega\left(f_t\right) \\ = & \sum_{i=1}^N \frac{1}{2} h_i\left(f_t\left(\mathbf{x}_{\mathbf{i}}\right)-\left(-\frac{g_i}{h_i}\right)\right)^2+\Omega\left(f_t\right)\end{aligned} ===i=1∑N(gift(xi)+21hift2(xi))+Ω(ft)i=1∑N21hi(2higift(xi)+ft2(xi))+Ω(ft)i=1∑N21hi(hi2gi2+2higift(xi)+ft2(xi))+Ω(ft)i=1∑N21hi(ft(xi)−(−higi))2+Ω(ft)
注释:
推导第三行可以加入 g i 2 h i 2 \frac{g_i^2}{h_i^2} hi2gi2是因为 g i g_i gi和 h i h_i hi是上一轮的损失函数求导,是常量。上式就像是标签为 − g i h i -\frac{g_i}{h_i} −higi,权重为 h i h_i hi的平方损失.在建立第i棵树的时候已经知道数据集在前面i−1棵树的误差,因此采样的时候是需要考虑误差,对于误差大的特征值采样粒度要加大,误差小的特征值采样粒度可以减小,也就是说采样的样本是需要权重的。
采样粒度加大是指在抽样或数据采集过程中,选择的数据间隔变得更小,即每次采样包括的数据范围更小。在机器学习和数据处理领域,这通常意味着用于训练模型的数据点之间的距离减小了(要保证每个分位点之间的差值一样)。如果我们将数据想象成一个连续的序列,较大的采样粒度意味着我们从这个序列中选择点的步长更小。
XGBoost中,对于误差较大的特征值,增加采样粒度可以帮助模型更加集中于这些区域的重要变化,从而可能提高模型对这些区域的学习和泛化能力。
二阶导数h为权重的解释
如果损失函数是Square loss,即 L o s s ( y , y ^ ) = ( y − y ^ ) 2 Loss(y,\hat y)=(y−\hat y)^2 Loss(y,y^)=(y−y^)2,则h=2,那么实际上是不带权。 如果损失函数是Log loss,则h=pred∗(1−pred). 这是个开口朝下的一元二次函数,所以最大值在0.5。当pred在0.5附近,这个值是非常不稳定的,很容易误判,h作为权重则因此变大,那么直方图划分,这部分就会被切分的更细。
注解:


分界点选取时机
XGBoost有两种策略,全局策略(Global)和局部策略(Local)
-
Global: 学习每棵树前, 即开始之前为整颗树做一次提取即可,在每次的节点划分时都使用已经提取好的候选切分点
-
Local: 每次分裂前, local方式是在每次节点切分时才进行,需要很多次的提取
注释:
global方式需要更多的候选点,即对候选点提取数量比local更多,因为没有像local方式一样每次节点划分时(前面父节点划分过的可以不用考虑),对当前节点的样本进行细化,local方式更适合树深度较大的情况。
稀疏值处理 - Sparsity-aware Split Finding
在真实世界中,我们的特征往往是稀疏的,可能的原因有:
- 数据缺失值;
- 大量的0值(比如统计出现的);
- 进行了One-hot 编码。
XGBoost能对缺失值自动进行处理,其思想是对于缺失值自动学习出它该被划分的方向(左子树or右子树):

注意:
上述的算法只遍历非缺失值(缺失值只是确实特征值,label是不会缺失的,不影响叶子节点的值,该值可能是该叶子节点的所有样本的label值的均值,也就不影响后面计算一阶导和二阶导)。划分的方向怎么学呢?很naive但是很有效的方法:
- 让特征k的所有缺失值的都到右子树,然后和之前的一样,枚举划分点,计算最大的gain;
- 让特征k的所有缺失值的都到左子树,然后和之前的一样,枚举划分点,计算最大的gain.
这样最后求出最大增益的同时,也知道了缺失值的样本应该往左边还是往右边。使用了该方法,相当于比传统方法多遍历了一次,但是它只在非缺失值的样本上进行迭代,因此其复杂度与非缺失值的样本成线性关系.
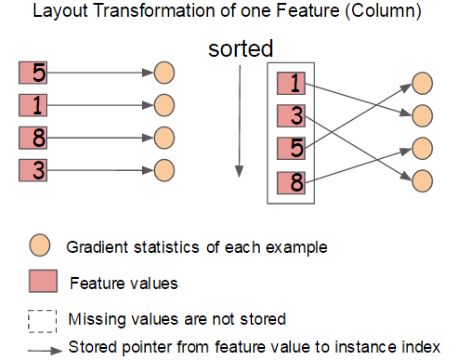
分块并行 - Column Block for Parallel Learning
在建树的过程中,最耗时是找最优的切分点,而这个过程中,最耗时的部分是将数据排序。为了减少排序的时间,提出Block结构存储数据。
-
Block中的数据以稀疏格式CSC进行存储
介绍稀疏格式CSC:
CSC格式通常包含三个主要数组:
- 数值数组 (Values):存储所有非零元素的数值,按列顺序排列。
- 行索引数组 (Row Indices):存储每个非零元素的行索引。这个数组的长度与数值数组相同。
- 列指针数组 (Column Pointers):存储每列非零元素在数值数组中的开始位置。此外,最后一个元素是非零元素的总数。
假设我们有以下 4×4稀疏矩阵:
[ 10 0 0 0 0 20 0 0 0 0 30 0 0 40 0 50 ] \left[\begin{array}{cccc}10 & 0 & 0 & 0 \\ 0 & 20 & 0 & 0 \\ 0 & 0 & 30 & 0 \\ 0 & 40 & 0 & 50\end{array}\right] 100000200400030000050
在CSC格式中,这个矩阵将被存储为:
- 数值数组:10,20,40,30,50
- 行索引数组:0,1,3,2,3(从0开始索引)
- 列指针数组:0,1,3,4,5(第二列中有两个元素20、40,第一个元素20在数值数组中的开始位置索引是1,只记录开始位置,40的索引可以不记录)
-
Block中的特征进行排序(不对缺失值排序)
-
Block 中特征还需存储指向样本的索引,这样才能根据特征的值来取梯度。
-
一个Block中存储一个或多个特征的值
注意:
可以看出,只需在建树前排序一次,后面节点分裂时可以直接根据索引得到梯度信息。
-
在Exact greedy算法中,将整个数据集存放在一个Block中。这样,复杂度从原来的 O ( H d ∣ ∣ x ∣ ∣ 0 l o g n ) O(Hd||x||_0logn) O(Hd∣∣x∣∣0logn)降为 O ( H d ∣ ∣ x ∣ ∣ 0 + ∣ ∣ x ∣ ∣ 0 l o g n ) O(Hd||x||_0+||x||_0logn) O(Hd∣∣x∣∣0+∣∣x∣∣0logn),其中 ∣ ∣ x ∣ ∣ 0 ||x||_0 ∣∣x∣∣0为训练集中非缺失值的个数。这样,Exact greedy算法就省去了每一步中的排序开销。
分析:
原始的稀疏贪心算法不使用块存储。因此,为了找到每个节点的最优分割,你需要在每一列上重新排序数据。这样在每一层会产生一个时间复杂度,可以非常粗略地近似为 O ( ∥ x ∥ 0 log n ) O\left(\|x\|_0 \log n\right) O(∥x∥0logn) : 比方说你有 ∥ x ∥ 0 i \|x\|_{0 i} ∥x∥0i 个非零条目对于每一个特征 1 ≤ i ≤ m 1 \leq i \leq m 1≤i≤m ; 然后在每一层你都在排序列表,每个列表最多有 n n n 个长度,这些列表的长度总和为 ∑ i = 1 m ∥ x ∥ 0 i = ∥ x ∥ 0 \sum_{i=1}^m\|x\|_{0 i}=\|x\|_0 ∑i=1m∥x∥0i=∥x∥0 ,排序时间不会超过 O ( ∥ x ∥ 0 log n ) O\left(\|x\|_0 \log n\right) O(∥x∥0logn) 。乘以 K K K 棵树和每棵树 d d d 层,就得到了原始的 O ( K d ∥ x ∥ 0 log n ) O\left(K d\|x\|_0 \log n\right) O(Kd∥x∥0logn) 时间复杂度。
对所有特征进行排序的时间复杂度 : ∑ i = 1 m l o g ( n ! ) = ∑ i = 1 m [ l o g n + l o g ( n − 1 ) + l o g ( n − 2 ) + . . . l o g 2 + l o g 1 ] ≥ ∑ i = 1 m [ l o g n + l o g ( n − 1 ) + l o g ( n − 2 ) + . . . + l o g ( n − ∣ ∣ x ∣ ∣ o i + 1 ) ] ≥ ∑ i = 1 m ( ∣ ∣ x ∣ ∣ 0 i ) l o g ( n − ∣ ∣ x ∣ ∣ o i + 1 ) ( 忽略常数 ) = O ( ∣ ∣ x ∣ ∣ 0 l o g n ) \begin{align} &对所有特征进行排序的时间复杂度:\\ \sum_{i=1}^mlog(n!)&=\sum_{i=1}^m[logn+log(n-1)+log(n-2)+...log2+log1]\\&\ge \sum_{i=1}^m[logn+log(n-1)+log(n-2)+...+log(n-||x||_{oi}+1)]\\&\ge \sum_{i=1}^m(||x||_{0i})log(n-||x||_{oi}+1)(忽略常数)\\&=O(||x||_0logn)\end{align} i=1∑mlog(n!)对所有特征进行排序的时间复杂度:=i=1∑m[logn+log(n−1)+log(n−2)+...log2+log1]≥i=1∑m[logn+log(n−1)+log(n−2)+...+log(n−∣∣x∣∣oi+1)]≥i=1∑m(∣∣x∣∣0i)log(n−∣∣x∣∣oi+1)(忽略常数)=O(∣∣x∣∣0logn)
另一方面,使用块结构,因为数据已经预先按照每一列排序了,所以你不需要在每个节点重新排序,只要你在每个节点(余下哪些特征)跟踪哪些特征到达了那个节点。正如作者所指出的,这将复杂度降低到 O ( K d ∣ ∣ x ∣ ∣ 0 ) O(Kd||x||_0) O(Kd∣∣x∣∣0)(因为现在可以通过在块上单次扫描找到每一层的最优分割,所有特征进行排序结果都实现存储在block中,只需根据csc格式索引来读取信息,需要将行索引和列索引结合与稀疏数组进行比对,数值数组、行索引和列索引中最多的数组是 ∣ ∣ x ∣ ∣ 0 ||x||_0 ∣∣x∣∣0个元素)加上任何预处理的成本(作者声称这是 O ( ∣ ∣ x ∣ ∣ 0 l o g n ) O(||x||_0logn) O(∣∣x∣∣0logn),这是有意义的)。
-
在近似算法中,使用多个Block,每个Block(一个Block中存储一个或多个特征的值)对应原来数据的子集。不同的Block可以在不同的机器上计算。该方法对Local策略尤其有效,因为Local策略每次分支都重新生成候选切分点。
在树生成过程中,需要花费大量的时间在特征选择与切分点选择上,并且这部分时间中大部分又花费在了对特征值得排序上。那么怎么样减小这个排序时间开销呢?
作者提出通过按特征进行分块并排序,在块里面保存排序后的特征值及对应样本的引用,以便于获取样本的一阶、二阶导数值。具体方式如图:

通过顺序访问排序后的块,遍历样本特征的特征值,方便进行切分点的查找。此外分块存储后多个特征之间互不干涉,可以使用多线程同时对不同的特征进行切分点查找,即特征的并行化处理。注意到,在顺序访问特征值时,访问的是一块连续的内存空间,但通过特征值持有的索引(样本索引)访问样本获取一阶、二阶导数时,这个访问操作访问的内存空间并不连续(左图是左边第一个对应右边,而右图第一个箭头并不是指向右边第一个),这样可能造成cpu缓存命中率低,影响算法效率。那么怎么解决这个问题呢?
解释不连续的内存访问?
不连续的内存访问,也称为非顺序或随机内存访问,是指对计算机内存的访问模式,其中数据访问的位置在内存中不是按照连续的、顺序的方式进行的。这与连续的内存访问形成对比,连续访问是指数据被顺序地、一个接一个地存储和访问。以下是一些详细解释:
- 连续内存访问:在连续的内存访问中,数据元素被顺序地存储在内存中。例如,在处理数组时,数组的元素通常存储在连续的内存位置中。当程序访问数组的一个元素后,下一个被访问的元素就是物理上紧接着的那个。这种访问模式对CPU缓存非常友好,因为一次内存读取可以将多个连续的数据元素带入缓存。
- 不连续内存访问:在不连续的内存访问中,数据元素在内存中的位置是分散的。例如,在处理链表或者跳跃访问数组时,接下来要访问的数据元素可能位于内存中完全不同的位置。这种访问模式对CPU缓存不友好,因为缓存无法有效地预加载即将访问的数据,导致缓存未命中的概率增加。
- 对CPU缓存的影响:多数现代CPU都采用某种形式的预取策略,即基于当前访问的数据来预测下一次可能访问的数据。在连续内存访问模式中,预取器可以轻松预测下一个数据块的位置,因为它通常紧随当前数据块。然而,在不连续内存访问中,下一个数据块的位置可能随机分散在内存中,使得预取变得复杂和不可靠。
- 缓存行和内存块:CPU缓存以缓存行的形式工作,通常一次加载整个缓存行的数据。在连续内存访问中,一次缓存行加载可能包含多个即将被访问的数据项。但在不连续访问中,加载的缓存行可能只包含单个有用数据项,其余部分可能无关或不会被立即访问。
- 缓存未命中的开销:每当CPU尝试从缓存中读取数据但未找到时,就会发生缓存未命中。这迫使CPU等待较慢的主内存加载数据,从而增加了延迟并降低了性能。
xgboost中 会存在cpu缓存命中率低的原因:
- 特征和数据集的大小:处理具有大量特征的大型数据集时,数据量可能远远超出CPU缓存的容量,导致高缓存低命中率(缓存放不下这么多数据)。特别是在并行处理特征时,每个核心可能需要访问不同的数据集部分,这进一步增加了缓存未命中的可能性。
- 大量数据访问和不规则内存访问模式:XGBoost在训练过程中需要处理大量数据。特别是在并行计算特征分割点时,算法会访问大量分散在内存中的数据点。由于数据访问模式可能是不规则的(即不连续的内存访问),这可能导致CPU缓存命中率低。
- 计算与内存访问的比例:在XGBoost的训练过程中,计算与内存访问的比例可能导致缓存效率问题。如果算法的计算强度较低(即每次内存访问所进行的计算较少),则更多的时间会花在等待数据从内存加载到CPU上,而不是进行实际的计算。这会增加缓存未命中的机会
Block结构还有其它好处,数据按列存储,可以同时访问所有的列,很容易实现并行的寻找分裂点算法。此外也可以方便实现之后要讲的out-of score计算。
缓存优化 - Cache-aware Access
使用Block结构的一个缺点是取梯度的时候,是通过索引来获取的,而这些梯度的获取顺序是按照特征的大小顺序的。这将导致非连续的内存访问,可能使得CPU cache缓存命中率低,从而影响算法效率。
因此,对于exact greedy算法中, 使用缓存预取。具体来说,对每个线程分配一个连续的buffer,读取梯度信息并存入Buffer中(这样就实现了非连续到连续的转化),然后再统计梯度信息。该方式在训练样本数大的时候特别有用。
在approximate 算法中,对Block的大小进行了合理的设置。定义Block的大小为Block中最多的样本数。设置合适的大小是很重要的,设置过大则容易导致命中率低,过小则容易导致并行化效率不高
核外计算 Blocks for Out-of-core Computation
XGBoost的其中一个目标是,充分利用机器资源来达到scalable learning。除了处理器和内存外,很重要的一点是,使用磁盘空间来处理不能完全装载进主存的数据。当数据量太大不能全部放入主内存的时候,为了使得out-of-core计算称为可能,将数据划分为多个Block并存放在磁盘上。计算的时候,使用独立的线程预先将Block放入主内存,因此可以在计算的同时读取磁盘。但是由于磁盘IO速度太慢,通常跟不上计算的速度。因此,减小开销和增加磁盘IO吞吐很重要,Xgboost采用了2个策略:
- Block压缩(Block Compression):将Block按列压缩,读取的时候用另外的线程解压。对于行索引,只保存第一个索引值,然后只保存该数据与第一个索引值之差(offset),一共用16个bits来保存offset,因此,一个block一般有2的16次方个样本。
解释一个block一般有2的16次方个样本?
- 16位二进制数的表示范围:一个二进制位(bit)可以表示两个值(0或1)。因此,16位二进制数可以表示的不同值的数量是 2 16 2^{16} 216,即65536。这是因为每增加一个比特,表示的值的数量就翻倍。
- 偏移量的存储:在这种方法中,每个行索引的偏移量被限制为16位,这意味着每个偏移量可以表示从0到65535的范围(最大的偏移量为65535,也就是 2 16 + 0 ( 第一个元素的索引为 0 ) 2^{16}+0(第一个元素的索引为0) 216+0(第一个元素的索引为0))。这些偏移量是相对于第一个索引值的,所以偏移量0表示第一个索引本身。
- Block拆分(Block Sharding):将数据划分到不同磁盘上,为每个磁盘分配一个**预取(pre-fetcher)**线程,并将数据提取到内存缓冲区中。然后,训练线程交替地从每个缓冲区读取数据。这有助于在多个磁盘可用时增加磁盘读取的吞吐量。
总结
读到这里,相信你对XGBoost已经很有了解。下面总结几个问题:
XGBoost为什么快
- 当数据集大的时候使用近似算法
- Block与并行
- CPU cache 命中优化
- Block预取、Block压缩、Block Sharding等
XGBoost与传统GBDT的不同
-
传统GBDT以CART作为基分类器,xgboost还支持线性分类器,这个时候xgboost相当于带L1和L2正则化项的逻辑斯蒂回归(分类问题)或者线性回归(回归问题)。
-
传统GBDT在优化时只用到一阶导数信息,xgboost则对代价函数进行了二阶泰勒展开,同时用到了一阶和二阶导数。顺便提一下,xgboost工具支持自定义代价函数,只要函数可一阶和二阶求导。
-
xgboost在代价函数里加入了正则项,用于控制模型的复杂度。正则项里包含了树的叶子节点个数、每个叶子节点上输出的score的L2模的平方和。从Bias-variance tradeoff角度来讲,正则项降低了模型的variance,使学习出来的模型更加简单,防止过拟合,这也是xgboost优于传统GBDT的一个特性。
-
Shrinkage(缩减),相当于学习速率(xgboost中的eta)。xgboost在进行完一次迭代后,会将叶子节点的权重乘上该系数,主要是为了削弱每棵树的影响,让后面有更大的学习空间。实际应用中,一般把eta设置得小一点,然后迭代次数设置得大一点。(补充:传统GBDT的实现也有学习速率)
-
列抽样(column subsampling)。xgboost借鉴了随机森林的做法,支持列抽样,不仅能降低过拟合,还能减少计算,这也是xgboost异于传统gbdt的一个特性。
-
对缺失值的处理。对于特征的值有缺失的样本,xgboost可以自动学习出它的分裂方向。
-
xgboost工具支持并行。boosting不是一种串行的结构吗?怎么并行的?注意xgboost的并行不是tree粒度的并行,xgboost也是一次迭代完才能进行下一次迭代的(第t次迭代的代价函数里包含了前面t-1次迭代的预测值)。xgboost的并行是在特征粒度上的。我们知道,决策树的学习最耗时的一个步骤就是对特征的值进行排序(因为要确定最佳分割点),xgboost在训练之前,预先对数据进行了排序,然后保存为block结构,后面的迭代中重复地使用这个结构,大大减小计算量。这个block结构也使得并行成为了可能,在进行节点的分裂时,需要计算每个特征的增益,最终选增益最大的那个特征去做分裂,那么各个特征的增益计算就可以开多线程进行。
特征的粒度:在机器学习中,特征是数据集中的属性或变量,用于描述每个样本的不同方面。例如,在房价预测问题中,特征可以包括房子的面积、卧室数量、浴室数量等。这些特征是用来训练和测试机器学习模型的输入。
在特征的粒度上的并行:XGBoost中的并行计算是针对每个特征的。具体来说,XGBoost可以同时处理数据集中的不同特征,而不是按照顺序逐个处理。这意味着在训练或预测时,XGBoost可以并行计算每个特征的信息增益(或梯度),然后将这些结果合并以更新模型的状态。这种特征级别的并行计算使XGBoost能够高效地处理大量特征,尤其是在大规模数据集上。
-
可并行的近似直方图算法。树节点在进行分裂时,我们需要计算每个特征的每个分割点对应的增益,即用贪心法枚举所有可能的分割点。当数据无法一次载入内存或者在分布式情况下,贪心算法效率就会变得很低,所以xgboost还提出了一种可并行的近似直方图算法,用于高效地生成候选的分割点。
XGBoost Scalable的体现
XGBoost的paper在KKD上发表,名为:《Xgboost: A scalable tree boosting system》,那么scalable体现在哪?
- 模型的scalability:弱分类器可以支持cart也可以支持lr和linear, 但其实这是Boosting算法做的事情,XGBoost只是实现了而已。
- 目标函数的scalability: 支持不同的loss function, 支持自定义loss function,只要一、二阶可导。有这个特性是因为泰勒二阶展开,得到通用的目标函数形式。
- 学习方法的scalability:Block结构支持并行化,支持 Out-of-core计算
XGBoost 防止过拟合的方法
- 目标函数的正则项, 叶子节点数+叶子节点数输出分数的平方和 Ω ( f t ) = γ T + 1 2 λ ∑ j = 1 T w j 2 \Omega\left(f_t\right)=\gamma T+\frac{1}{2} \lambda \sum_{j=1}^T w_j^2 Ω(ft)=γT+21λ∑j=1Twj2
- 行抽样和列抽样:训练的时候只用一部分样本和一部分特征
- 可以设置树的最大深度
- η: 可以叫学习率、步长或者shrinkage
- Early stopping:使用的模型不一定是最终的ensemble,可以根据测试集的测试情况,选择使用前若干棵树
XGBoost的创新点
- 第一,实现精确性与复杂度之间的平衡
树的集成模型是机器学习中最为强大的学习器之一,这一族学习器的特点是精确性好、适用于各种场景,但运行缓慢、且过拟合风险很高,而剪枝策略的目的就是为了降低各种树模型的模型复杂度,从而控制住过拟合。树模型的学习能力与过拟合风险之间的平衡,就是预测精确性与模型复杂度之间的平衡,也是经验风险与结构风险之间的平衡,这一平衡对决策树以及树的集成模型来说是永恒的议题。
在过去,我们总是先建立效果优异的模型,再依赖于手动剪枝来调节树模型的复杂度,但在XGBoost中,精确性与复杂度会在训练的每一步被考虑到。主要体现在:
1. XGBoost为损失函数 L ( y , y ^ ) L(y,\hat{y}) L(y,y^)加入结构风险项,构成目标函数 O ( y , y ^ ) O(y,\hat{y}) O(y,y^)
在AdaBoost与GBDT当中,我们的目标是找到损失函数 L ( y , y ^ ) L(y,\hat{y}) L(y,y^)的最小值,也就是让预测结果与真实结果差异最小,这一流程只关心精确性、不关心复杂度和过拟合情况。为应对这个问题,XGBoost从决策树的预剪枝流程、逻辑回归、岭回归、Lasso等经典算法的抗过拟合流程吸取经验,在损失函数中加入了控制过拟合的结构风险项,并将【 L ( y , y ^ ) L(y,\hat{y}) L(y,y^) + 结构风险】定义为目标函数 O ( y , y ^ ) O(y,\hat{y}) O(y,y^)。
这一变化让XGBoost在许多方面都与其他Boosting算法不同:例如,XGBoost是向着令目标函数最小化的目标进行训练,而不是令损失函数最小化的方向。再比如,XGBoost会优先利用结构风险中的参数来控制过拟合,而不像其他树的集成模型一样依赖于树结构参数(例如
max_depth,min_impurity_decrease等)。2. 使用全新不纯度衡量指标,将复杂度纳入分枝规则
在之前学过的算法当中,无论Boosting流程如何进化,建立单棵决策树的规则基本都遵循我们曾经学过的CART树流程,在分类树中,我们使用信息增益(information gain)来衡量叶子的质量,在回归树中,我们使用MSE或者弗里德曼MSE来衡量叶子的质量。这一流程有成熟的剪枝机制、预测精度高、能够适应各种场景,但却可能建立复杂度很高的树。
为实现精确性与复杂度之间的平衡,XGBoost重新设定了分枝指标**【结构分数】(原论文中写作Structure Score,也被称为质量分数Quality Score),以及基于结构分数的【结构分数增益】**(Gain of structure score),结构分数增益可以逼迫决策树向整体结构更简单的方向生长。
这一变化让XGBoost使用与传统CART略有区别的建树流程,同时在建树过程中大量使用残差(Residuals)或类残差对象作为中间变量,因此XGBoost的数学过程比其他Boosting算法更复杂。
- 第二,极大程度地降低模型复杂度、提升模型运行效率,将算法武装成更加适合于大数据的算法
在任意决策树的建树过程中,都需要对每一个特征上所有潜在的分枝节点进行不纯度计算,当数据量巨大时,这一计算将消耗巨量的时间,因此树集成模型的关键缺点之一就是计算缓慢,而这一缺点在实际工业环境当中是相当致命的。为了提升树模型的运算速度、同时又不极大地伤害模型的精确性,XGBoost使用多种优化技巧来实现效率提升:
- 1. 使用估计贪婪算法、平行学习、分位数草图算法等方法构建了适用于大数据的全新建树流程
- 2. 使用感知缓存访问技术与核外计算技术,提升算法在硬件上的运算性能
- 3. 引入Dropout技术,为整体建树流程增加更多随机性、让算法适应更大数据
不仅在数学方法上有所改进,XGBoost正式拉开了Boosting算法工程优化的序幕。后续更多的Boosting算法,包括LightGBM,CatBoost等也都是在工程方法上做出了大量的优化。
除此之外,XGBoost还保留了部分与梯度提升树类似的属性,包括:
- 弱评估器的输出类型与集成算法输出类型不一致
对于AdaBoost或随机森林算法来说,当集成算法执行的是回归任务时,弱评估器也是回归器,当集成算法执行分类任务时,弱评估器也是分类器。但对于GBDT以及基于GBDT的复杂Boosting算法们而言,无论集成算法整体在执行回归/分类/排序任务,弱评估器一定是回归器。GBDT通过sigmoid或softmax函数输出具体的分类结果,但实际弱评估器一定是回归器,XGBoost也是如此。
- 拟合负梯度,且当损失函数是0.5倍MSE时,拟合残差
任意Boosting算法都有自适应调整弱评估器的步骤。在GBDT当中,每次用于建立弱评估器的是样本 X X X以及当下集成输出 H ( x i ) H(x_i) H(xi)与真实标签 y y y之间的伪残差(也就是负梯度)。当损失函数是 1 2 M S E \frac{1}{2}MSE 21MSE时,负梯度在数学上等同于残差(Residual),因此GBDT是通过拟合残差来影响后续弱评估器结构。XGBoost也是依赖于拟合残差来影响后续弱评估器结构,但是与GBDT一样,这一点需要通过数学来证明。
- 抽样思想
GBDT借鉴了大量Bagging算法中的抽样思想,XGBoost也继承了这一属性,因此在XGBoost当中,我们也可以对样本和特征进行抽样来增大弱评估器之间的独立性
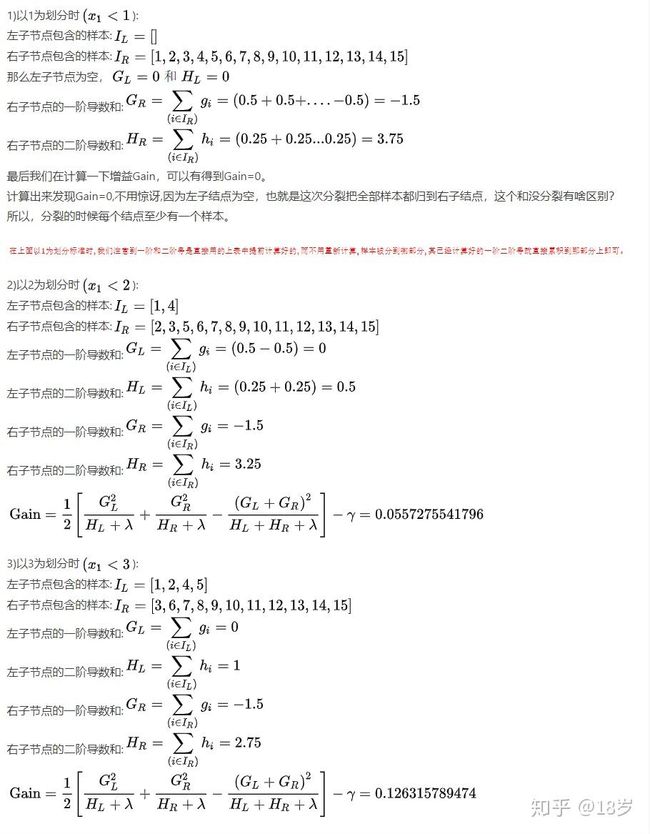
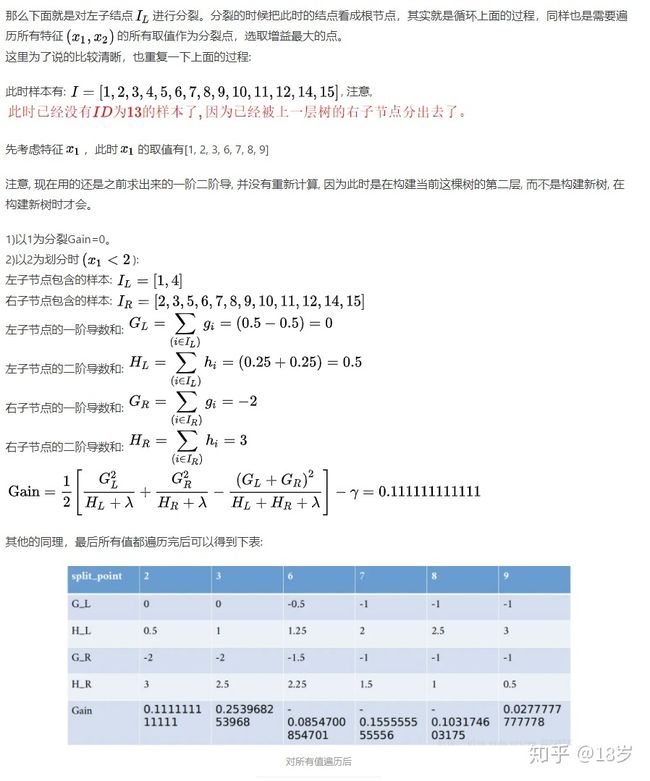
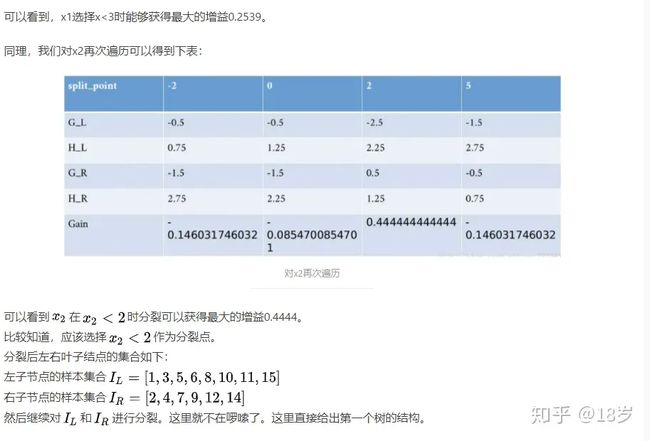
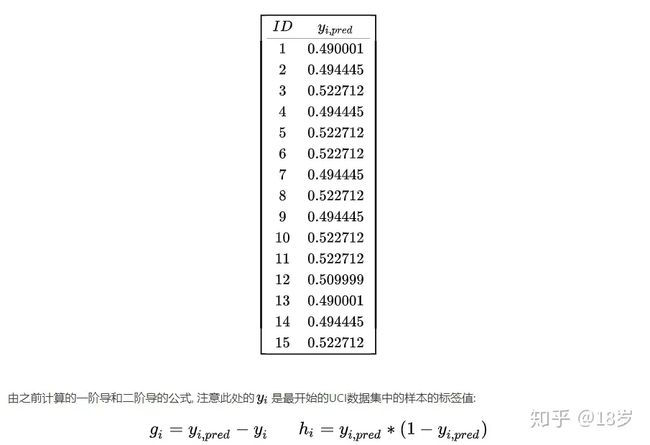
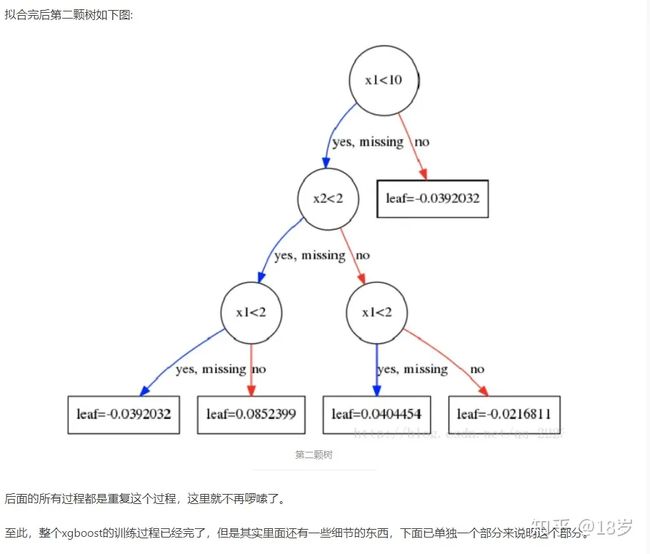
XGBoost实例(copy的知乎的一个例子,目的是熟悉算法流程)

注意:logloss: y i l o g ( 1 + e − y ^ i ) + ( 1 − y i ) ∗ l o g ( 1 + e y ^ i ) ) y_i log(1+e^{-\hat y_i})+(1-y_i)*log(1+e^{\hat y_i})) yilog(1+e−y^i)+(1−yi)∗log(1+ey^i))(下面图片的中 L ( y i , y ^ i ) L(y_i,\hat y_{i}) L(yi,y^i)错了)





相比于GBDT,XGBoost的优点?
解释:XGBoost拟合的也是残差?
当目标函数为 1 2 M S E \frac{1}{2}MSE 21MSE,负梯度 − g i -g_i −gi就等于残差,而 h i = 1 h_i = 1 hi=1,因此拟合项 − g i h i -\frac{g_i}{h_i} −higi自然也是残差本身了。因此,XGBoost也是拟合负梯度的算法,并且在特定损失函数下,XGBoost也拟合残差。
参考资料
- https://www.matongxue.com/madocs/7/
- https://www.matongxue.com/madocs/126/
- 菜菜九天机器学习课程
- https://www.hrwhisper.me/machine-learning-xgboost/
- Chen, Tianqi, and Carlos Guestrin. “Xgboost: A scalable tree boosting system.” Proceedings of the 22nd acm sigkdd international conference on knowledge discovery and data mining. ACM, 2016.
- https://zhuanlan.zhihu.com/p/92837676
- http://t.csdnimg.cn/mTL0h
- XGBoost 与 Boosted Tree - 陈天奇:https://pan.baidu.com/s/10NWfRM9qimswGxPsF9VlDw 密码:v3y6