机器人开发--CanOpen
机器人开发--CanOpen
- 1 介绍
-
- 1.1 概述
- 1.2 应用
- 2 历史发展
- 3 协议
-
- 3.1 协议细节(来自CiA文档)
- 3.2 协议框架
-
- OSI 模型
- 服务
- COB-ID
- NMT
- SYNC
- 紧急事件对象 (EMCY)
- 服务数据对象 (SDO)
-
- SDO 下载
- SDO 上传
- SDO 加速写传输报文
- 过程数据对象PDO
- 3.3 应用细节(伺服电机)
-
- 通信(设置与连接)
- 调试运行
- 控制模式
- CiA 402 电源状态机
- 相关参数
- 运动范围限制
- 工作模式
-
- 标准定位工作模式
- 速度工作模式
- 标准速度工作模式
- 找零工作模式
- 插补位置模式工作模式
- 周期同步定位工作模式
- 周期同步速度工作模式
- 脉冲方向工作模式
- 数字输入和输出
- 3.3 应用细节(IO)
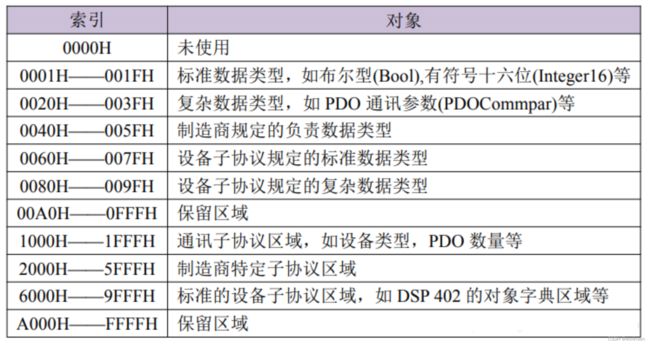
- 3.4 对象目录说明
- 4 组织
-
- 4.2 CANopen Solutions
- 4.3 nanotec 纳诺达克
- 参考
1 介绍
1.1 概述
CANopen是一种架构在控制局域网络(Controller Area Network, CAN)上的高层通信协议,包括通信子协议及设备子协议,常在嵌入式系统中使用,也是工业控制常用到的一种现场总线。
CANopen由非营利组织CiA(CAN in Automation)进行标准的起草及审核工作,基本的 CANopen 设备及通讯子协定定义在 CAN in Automation (CiA) draft standard 301中。针对个别设备的子协定以 CiA 301 为基础再进行扩充。如针对 I/O 模组的 CiA401 及针对运动控制的 CiA402。
1.2 应用
- 机器控制
- 工厂自动化
- 实验室自动化
- 交通运输
- 多功能车
- 楼宇自动化
- 医疗系统
2 历史发展
- 1994年:CiA发布了CANopen规范的第一个版本:CiA 301是最成功的Esprit研究项目之一。
- 1997年:CiA发布了用于驱动和运动控制的CiA 402 CANopen设备配置文件。该配置文件规范了伺服驱动器、变频器和步进电机控制器的功能行为。介绍了几种操作模式及相应的配置参数。
- 2001年:CiA 304 (CANopen Safety)规范发布,同时在EN 50325-5中标准化。
- 2003年:CiA 417 (CANopen电梯控制系统应用概要)规范系列发布。它也称为CANopen Lift,为不同的虚拟设备指定通信接口。
- 2009年:CiA组织了第一届CANopen Lift插件大赛。这些事件的目的是检查和提高CANopen设备的互操作性。
- 2017年:CiA 1301 (CANopen FD应用层和通信配置文件)规范公布。CANopen FD利用CAN FD数据链路层提供更高的比特率和更大的有效负载(每帧高达64字节)。此外,CiA还发布了CiA 601 (CAN FD节点和系统设计)系列,包括规范、指南和建议。
- 2019年:为了改善CAN FD网络的使用,CiA开发了SIC(信号改善能力)收发器规范,该规范已记录在CiA 601-4规范中。
- 2020: CiA 510规范指定了sdo和EMCY等CANopen协议到J1939参数组(pg)的映射。结合将特定于概要文件的pdo映射到pg,这使得也可以在J1939应用层上使用CiA概要文件(CiA 4XX系列)。
- 2021年:另一个里程碑是CAN XL的发展,这是第三代CAN数据链路和物理层。揭示了CiA 610-1(数据链路层和物理编码子层要求)和CiA 610-3(物理介质附件子层要求)规范。CAN XL帧格式允许数据字段的长度从1字节到2 048字节。
- 2022年:6月初,中央情报局以为期两天的面对面会议的方式庆祝其30岁生日。该项目包括CiA技术小组(CAN XL和CAN FD Light)的最新CAN发展,从海事电子到牙医椅的应用,以及CiA规范的未来。

3 协议
3.1 协议细节(来自CiA文档)
地址:https://www.can-cia.org/groups/specifications/
基本的 CANopen 设备及通讯子协定定义在 CAN in Automation (CiA) draft standard 301中。针对个别设备的子协定以 CiA 301 为基础再进行扩充。如针对 I/O 模组的 CiA401 及针对运动控制的 CiA402。
- CiA 301 CANopen 应用层和通信配置文件 - 应用层和通信配置文件,日期:2011 年 2 月 21 日,版本:4.2.0
- CiA 402 驱动和动作控制设备配置文件 - 第 1 部分:一般性定义,日期:2007 年 12 月 14 日,版本:3.0.0
- CiA 402 驱动和动作控制设备配置文件 - 第 2 部分:操作模式和应用数据,日期:2007 年 12 月 14 日,版本:3.0
- CiA 402 驱动和动作控制设备配置文件 - 第 3 部分:PDO 映射,日期:2007 年 12 月 14 日,版本:3.0
- CiA 306 电子设备描述 - 第 1 部分:电子数据手册和设备配置文件,日期:2012 年 2 月 8 日,版本:1.3.5
- CiA 305 底层设置服务 (LSS) 和协议,日期:2013 年 5 月 8 日,版本:3.0.0
3.2 协议框架
OSI 模型

服务
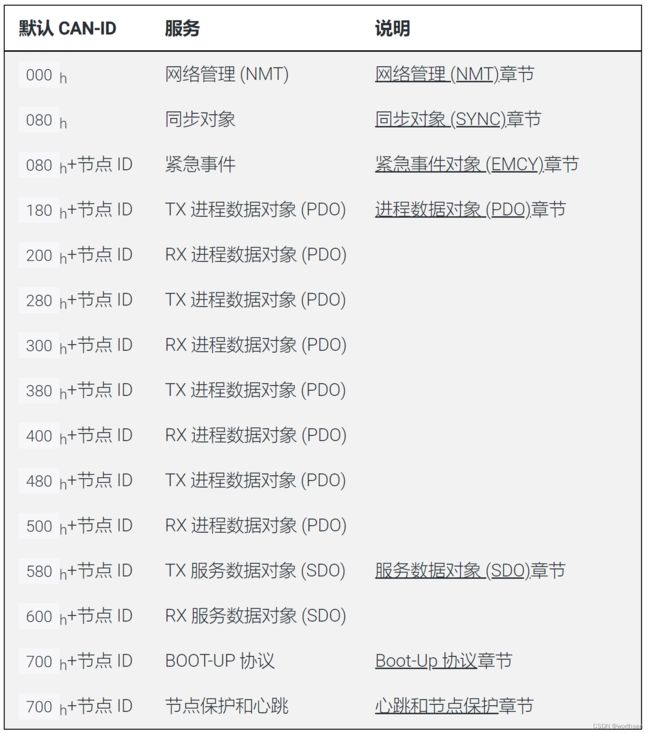

COB-ID

NMT
NMT 服务可用于启动、开始、监控、重置或停止 CANopen 设备。
这样,控制器即可遵循下图所示的状态图。只有在打开后或通过发送“重置通信”或“重置节点”NMT 命令才能达到“初始化”状态。 初始化之后可自动激活“预操作”状态。

nmt 消息的 CAN-ID 为 0。消息长度始终为两字节,结构如下:
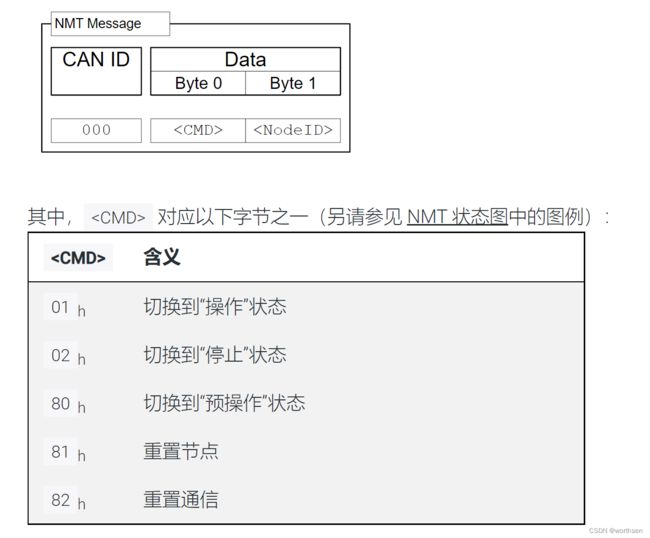
的值可为 00h;在这种情况下,NMT 命令适用于 CAN 总线(广播)上的所有设备。如果使用了非零数字,则只对具有相应节点 ID 的设备进行寻址。
SYNC
同步对象用于同时验证总线上所有设备的 PDO 数据的时间。同步消息的结构如下:

对于 SYNC 操作,通常为 RX-PDO 使用传输模式(传输类型)0(数据对下次 SYNC 有效);对于 TX-PDO,则选择 1 到 240 的传输模式。
接收到 SYNC 消息后,会有一个判定时间(“同步判定时间”),在此时间范围内可以发送和接收 PDO 消息;达到此判定时间后,所有设备都必须停止发送 PDO。可在对象 1007h:00h 中设置“同步判定时长”(毫秒)。
- 典型 CAN-SYNC 操作分为四个阶段:
- 接收 SYNC 消息。从而将之前接收到的 RX-PDO 数据复制到对象目录(如有)中。此时,也会对数据进行采样,并将数据复制到 TX-PDO,同时启动这些消息的发送。
- 然后通过总线上的所有从站发送 TX-PDO。
- 随后,通过 CANopen 主站发送 PDO。达到“同步判定时长”后,不再允许发送 PDO。
- “同步判定时间”再次关闭后,SDO 消息可进行最新交换。

紧急事件对象 (EMCY)
只要控制器中发生不是由 SDO 访问引起的错误,就会发送“紧急事件”类型的消息。该服务未经确认,通过 CAN-ID 80h+节点 ID 发送。
紧急事件消息的结构如下:

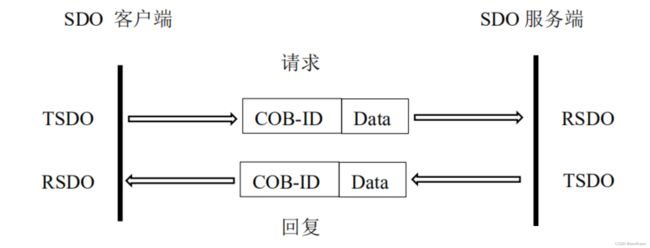
服务数据对象 (SDO)
“服务数据对象”允许对对象目录进行读取或写入访问。
将对象目录的所有者称为“服务器”;将想要请求或写入数据 CAN 节点称为“客户端”。“上传”是指从对象目录读取对象的值;“下载”是指将值写入对象目录。
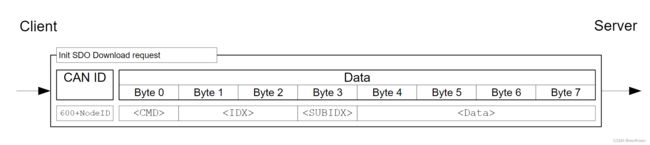
SDO 下载
用于向服务器的对象目录写入数据的加速 SDO 消息结构如下:

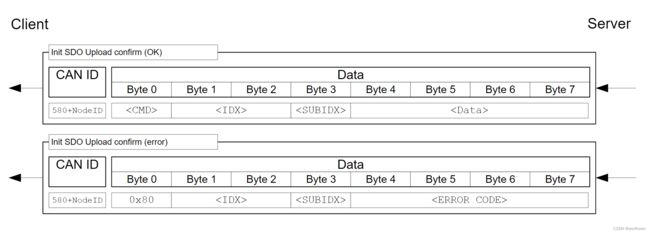
SDO 上传
用于从对象目录中读取对象的 CAN 消息的结构如下:

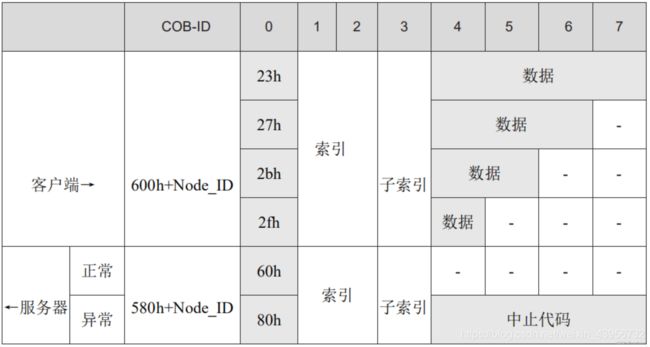
SDO 加速写传输报文
对于不高于 4 个字节的读写, 采用加速 SDO 传输。 按照读写方式及内容数据长度的不一致,传输报文各不相同。加速 SDO 写报文如下表:
过程数据对象PDO
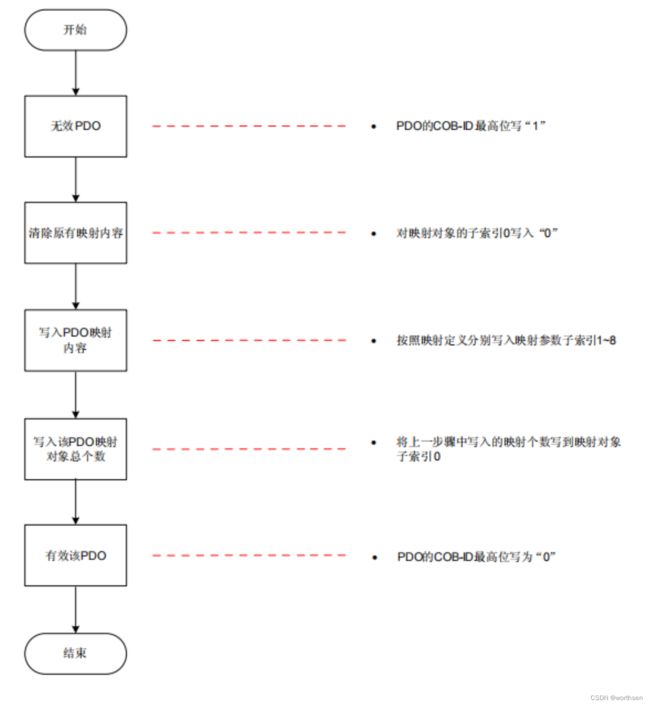
过程数据对象 (PDO) 用来传输实时的数据,是 CANopen 中最主要的数据传输方式。由于 PDO 的传输不需要应答,且 PDO 的长度可以小于 8 个字节,因此传输速度快。
PDO 的映射配置遵循流程如下:


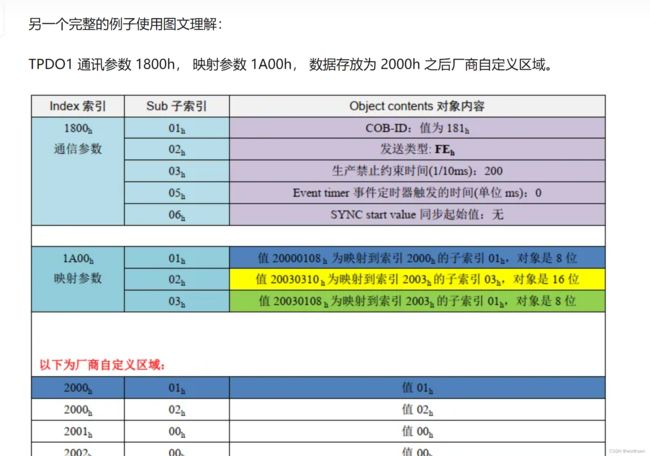
按照接收与发送的不同,PDO 可分为 RPDO 和 TPDO。 PDO 由通信参数和映射参数共同决定最终传输的方式及内容。 本伺服驱动器使用了 4 个 RPDO 和 4 个 TPDO 来实现 PDO 的传输,相关对象列表如下:

3.3 应用细节(伺服电机)
https://us.nanotec.com/products/manual/PD4E_CANopen_ZH/pd4e%2Fintroduction.html?cHash=d3b43174da641a1d53fca9c28d935948
通信(设置与连接)
- 设置节点和波特率
- 使用 CAN- 和 CAN+ 电缆将控制器连接到 CANopen 主站。检查 CAN-GND 的连接,根据实际调整终端电阻。
- 可以通过 6041 状态字来测试通信连接状态。
调试运行
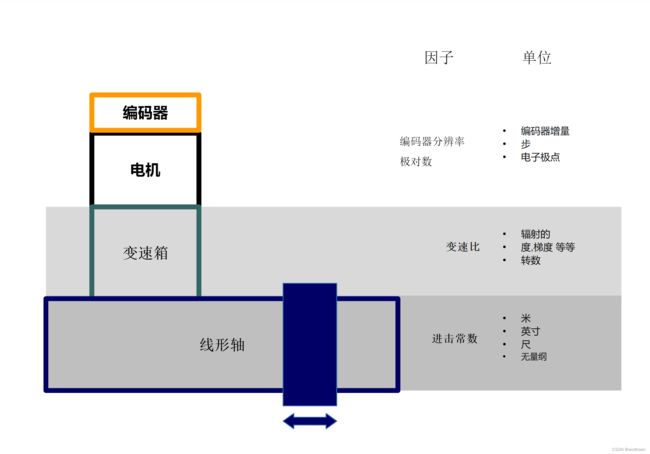
- 确定编码器线数、倍频、减速比等参数
- 设置工作模式(6060)、速度参数(6042)、控制字(6040)等
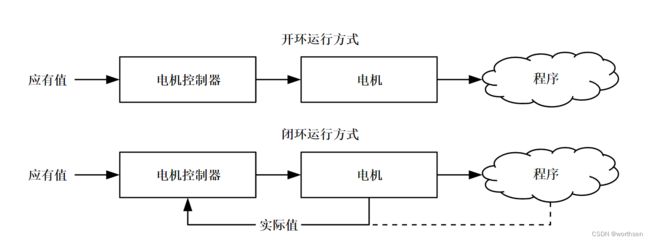
控制模式
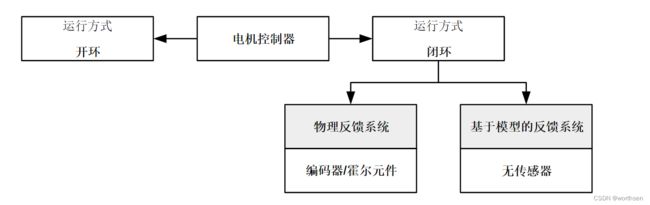
没有反馈的系统控制模式称为开环,有反馈的系统控制模式称为闭环。在闭环控制模式中,无论反馈信号来自电机本身还是来自受影响进程,最初都是无关紧要的。
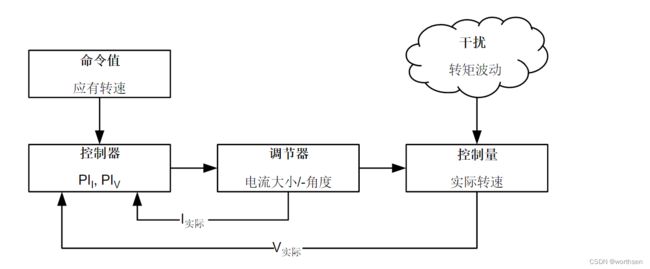
对于有反馈的控制器,会不断地将测量的控制变量(实际值)与设置点(设置值)进行比较。如果这些值之间存在偏差,控制器将根据规定的控制参数重新调节。
除物理反馈系统(如通过编码器或霍尔传感器)以外,还使用基于模型的反馈系统,统称为无传感器系统。这两种反馈系统也可组合使用,从而进一步提高控制质量。
开环优化:
开环模式下可能会发生共振;在低负载时尤其容易受共振影响。实践经验表明,根据不同应用,多种措施均能够大幅减少共振:
- 降低或增大电流,请参见对象 2031h(最大电流)。过多的转矩储备会助长共振。
- 降低或增大工作电压,同时考虑产品特定范围(具有足够的转矩储备)。请参见产品数据表查看允许的工作电压范围。
- 通过对象 3210h:09h (I_P) 和 3210h:0Ah (I_I) 优化电流控制器的控制参数。
- 根据所选控制模式调整加速度、减速度和/或目标转速:
闭环:
CiA 402 电源状态机
在对象 6040h(控制字)中请求状态更改。
在对象 6041h(状态字)中查看状态机的实际状态。
相关参数
运动范围限制
数字输入可用作限位开关。控制器也支持软件限位开关。

限位开关后即是公差带的起点。在此公差带内可自由运动。可在对象 2056h 中设定公差带的长度。
如果电机进入禁止范围,则控制器将触发立即停止,并切换到故障状态。
软件限位开关
控制器会考虑软件限位开关(607Dh(软件位置限制))。通过 607Dh 限制目标位置 (607Ah);要求位置 (6062h) 不得大于 607Dh 中的限值。如果设置限位开关时,电机处于允许范围以外,则仅接受允许范围方向的行程命令。
工作模式
标准定位工作模式
对象 6060h(操作模式)设定值“1”。
对象 6083h(标准加速度)、6084h(标准减速度)和 6081h(标准速度)。
标准定位模式用于移至最后目标位置的相对位置或绝对位置(最后参考位置)。在运动过程中,会考虑转速、启动加速度/制动减速度以及加加速的限值。
速度工作模式
对象 6048h(速度加速度)、6049h(速度减速度)和 6042h(目标速度)。
标准速度工作模式
对象 6083h(标准加速度)、6084h(标准减速度)和 6081h(标准速度)。
找零工作模式
对象 609Ah(找零加速度)、6099h:01h(搜索开关时的速度)和 6099h:02h(搜索零点时的速度)。
插补位置模式工作模式
可通过高级控制器影响加速和减速斜坡。
周期同步定位工作模式
可通过外部“定位规定/时间单位”目标影响加速和减速斜坡。
周期同步速度工作模式
可通过外部“定位规定/时间单位”目标影响加速和减速斜坡。
脉冲方向工作模式
通过对象 2057h(脉冲方向乘法器)和 2058h(脉冲方向除法器)更改步进分辨率。通过调整脉冲频率优化加速/减速斜坡,以尽快传递共振范围。
数字输入和输出
控制器的软件为各个对象中的输入和输出分配两个位(如 60FDh Digital Inputs 或 60FEh Digital Outputs):
3.3 应用细节(IO)
3.4 对象目录说明
https://us.nanotec.com/products/manual/PD4E_CANopen_ZH/object_dictionary%2Fobject_dir_intro.html?cHash=d3b43174da641a1d53fca9c28d935948
CANOPEN使用心得1-cia301、cia402简单提要
4 组织
4.2 CANopen Solutions
https://www.canopensolutions.com/
4.3 nanotec 纳诺达克
https://us.nanotec.com/
https://us.nanotec.com/products/manual/PD4E_CANopen_ZH/pd4e%2Fintroduction.html?cHash=d3b43174da641a1d53fca9c28d935948
参考
1、官方–CANopen
2、百科–CANopen
3、CanOpen通信----PDO与SDO
4、CanOpen学习记录
5、CanOpenSolutions
6、nanotec–CANOPEN
7、20210714学习手记 CANopen 协议
8、学习CANopen — [5] SDO
9、OSI七层模型、CAN、CiA、CANopen、CiA301CiA402和EtherCAT介绍
10、CANOpen轻松入门—对象字典OD
11、CANOPEN使用心得1-cia301、cia402简单提要
12、CAN总线与CANOPEN协议入门
13、canopen报文格式,通信及映射参数
14、CANopen版本控制产品修改映射PDO对象方法
15、从CAN到CANOpen——准入门大全(三)