实验笔记之——基于windows复现Instant-NGP
之前博客对NeRF-SLAM进行了调研,本博文先复现一下Intant-NGP。
学习笔记之——NeRF SLAM(基于神经辐射场的SLAM)-CSDN博客文章浏览阅读851次,点赞22次,收藏21次。NeRF 所做的任务是 Novel View Synthesis(新视角合成),即在若干已知视角下对场景进行一系列的观测(相机内外参、图像、Pose 等),合成任意新视角下的图像。传统方法中,通常这一任务采用三维重建再渲染的方式实现,NeRF 希望不进行显式的三维重建过程,仅根据内外参直接得到新视角渲染的图像。为了实现这一目的,NeRF 使用用神经网络作为一个 3D 场景的隐式表达,代替传统的点云、网格、体素、TSDF 等方式,通过这样的网络可以直接渲染任意角度任意位置的投影图像。https://blog.csdn.net/gwplovekimi/article/details/135083274?spm=1001.2014.3001.5501Intant-NGP论文链接:https://dl.acm.org/doi/pdf/10.1145/3528223.3530127
代码链接:https://github.com/NVlabs/instant-ngp
原理解读部分在调研博客里面已经写了,此处就不再详述。本博文仅仅记录配置实验过程。本博文部分资料来源于网络,仅供本人学习记录用~
首先看看电脑的gpu信息。点击“此电脑-管理-设备管理器-显示适配器”。

电脑的GPU是3090,那么应该就是属于下面第一个类别的了
- RTX 3000 & 4000 series, RTX A4000–A6000, and other Ampere & Ada cards
- RTX 2000 series, Titan RTX, Quadro RTX 4000–8000, and other Turing cards
- GTX 1000 series, Titan Xp, Quadro P1000–P6000, and other Pascal cards
解压后打开exe文件即可。
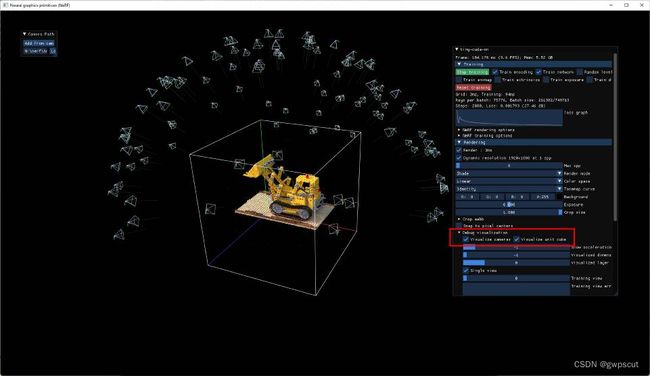
它的UI长这样:

GUI包括以下部分:
- 全面控制以交互方式探索神经图形基元
- 通过虚拟现实头戴设备查看神经图形基元的VR模式
- 保存和加载“快照”,以便在互联网上分享您的图形基元
- 相机路径编辑器用于创建视频,
- NeRF->Mesh和SDF->Mesh转换,
- 相机位置和镜头优化,
然后把data里nerf的fox拖进去就可以,如下面视频所示
Instant NGP testing fox
GUI按键各个功能如下:
Instant NGP testing GUI
通过下图中所示的按键也可以可视化相机的位置
fox里面一共115张图片,确实是瞬间就渲染出比较好的纹理效果~
对于fox文件里面还有一共transform.json文件,里面记录的就是相机的内参和外参(pose)了。
再测试一下用其他序列的效果,从视频可以看到,这个算法确实是挺不错的,再这些序列下都可以出来不错的效果~
Instant NGP testing different dataset
接下来看看用SDF作为输入的效果
Instant NGP testing SDF as input
好了~测试完作者给出的gui后,接下来看看用自己的采集数据测试的效果。作者提供了三个不同的script来处理数据,使得可以用inatant-ngp作为输入
- COLMAP to create a dataset from a set of photos or a video you took
- Record3D to create a dataset with an iPhone 12 Pro or newer (based on ARKit)
- NeRFCapture to create a dataset or stream posed images directly to instant-ngp with an iOS device.
首先作者建议用python3.7以上的版本来处理。先安装Anaconda(Free Download | Anaconda)
然后打开Anaconda Promp,并创建虚拟环境( nerf-ngp)
conda create -n nerf-ngp python=3.8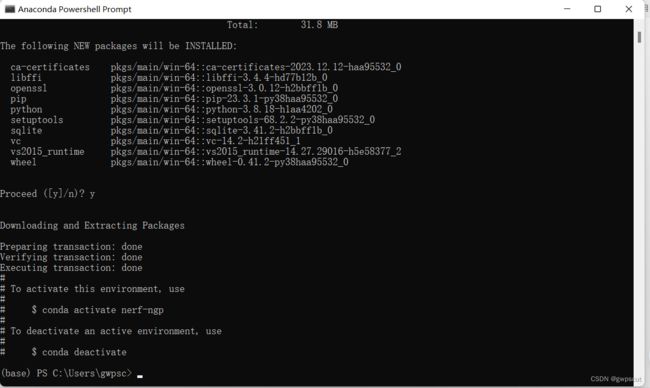
然后切换到虚拟环境下
conda activate nerf-ngp
再把下面的依赖包安装一下
pip install commentjson imageio numpy opencv-python-headless pybind11 pyquaternion scipy tqdm


应该都安装齐全了~
由于我的手机正好是iphone 12 pro,因此采用Record3D来测试。Record3D是一个IOS的app,可以用ARKit来估算camera的pose。
首先安装这个app(Record3D — 3D Videos and Point Cloud (RGBD) Streaming for iOS)。
然后,录制一段视频。如下所示,应该就是利用了iphone12的lidar测深度?
Record3D in Iphone 12 pro
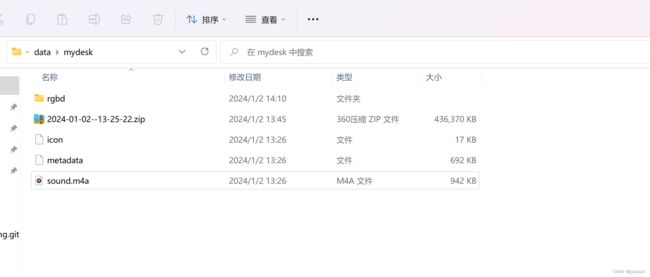
然后用“Shareable/Internal format (.r3d)”格式导出,将文件传到电脑。然后将.r3d变为.zip文件,并且解压如下
然后执行下面命令
python record3d2nerf.py --scene ..\data\mydesk如果采用横向方位捕捉视频,就添加-- rotate
就成功生成了pose与image序列~


然后用instant-NGP测试,结果报错如下
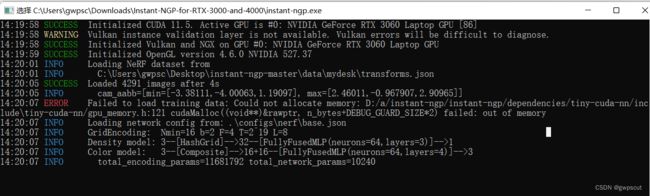
是因为序列太多了?那改一下用少点的序列看看~
还是不行~应该是由于图片太大?,占满了gpu的内存导致的?
但是看了一下图片的尺寸只是1140*1920(但一共有1573张图片,好像确实有点多,因此改一下帧率,让图像少些吧~)
结果要付费了。。。cao,为了科研,冲!
测试了几次,需要有足够的激励的~如下所示
Instant NGP testing self collect dataset
对于实际的场景,如果大大的超出了cube(如上视频所示),需要将将transforms.json中的参数aabb_scale设置为2的整数次方,最大为128(即1、2、4、8、...、128)(目前上面的视频展示为16,修改成4,截图如下)
这个值变小了后,场景就集中于这个杯子上了。那如果变为64呢?恢复的场景会大些,但是效果看上去是差不多的~感觉这个工作还是要继续深入了解一下,看看这些参数背后的意义~
至于渲染的效果好像都差不多没有太大的提升
根据作者给出的tips
NeRF模型在展示最佳效果时,需要50至150张图像,这些图像表现出最小的场景移动、运动模糊或其他模糊的伪影。重建的质量取决于先前的脚本能够从图像中提取准确的相机参数。请查看前面的部分,了解如何验证这一点的信息。
colmap2nerf.py 和 record3d2nerf.py 脚本假设训练图像大致指向一个共同的兴趣点,并将其放置在原点。该点是通过计算所有训练图像对中心像素射线的最近交点的加权平均值找到的。在实践中,这意味着当训练图像朝向感兴趣的对象时,脚本效果最佳,尽管它们不需要完整地围绕该对象完成全景视图。如果aabb_scale设置为大于1的数字,解释如上所述,仍然会重建出感兴趣对象背后可见的任何背景。
参考资料
https://github.com/MarvinChung/Orbeez-SLAM
Creating your own NeRF
快速跑 nerf instant-ngp 快速调试与配置,跑自己的数据_instant ngp在2080ti训练-CSDN博客